
ブルックス オートメーション インコーポレイテッドにより出願された特許
21 - 30 / 81
リニア駆動を利用した極低温冷凍機

【課題】各段の温度制御および効率に優れ、かつ、多種多様な冷却要件に応えることができる極低温冷凍機およびその動作方法を提供する。
【解決手段】本発明の極低温冷凍機は、第一段と、第二段と、第一段および第二段に高圧のガスを導入し、かつ、第一段および第二段からそのガスを排出するガス制御バルブとを備える。第一段の第1のディスプレーサに接続された第1のリニアモータと、第二段の第2のディスプレーサに接続された第2のリニアモータとにより、第一段および第二段の互いに独立した制御を行う。
(もっと読む)
クライオポンプの温度制御を行う装置および方法

【課題】熱負荷を調節したり、その構成品に対する熱の流れを抑えたりすることができる極低温ユニットまたはクライオポンプを提供する。
【解決手段】本発明の極低温ユニット又はクライオポンプは、冷凍機と、少なくとも1つの極低温排気面と、この極低温排気面に接続された、少なくとも1つの薄層の電気的な加熱素子とを備えている。また、輻射シールドが設けられてもよく、輻射シールドに、そのような薄層の電気的な加熱素子が形成されていてもよい。加熱素子により、極低温排気面、輻射シールド、またはその他の構成品の温度制御が行われる。なお、加熱素子を用いた温度制御は、コントローラにより自動的にされてもよい。
(もっと読む)
錫−アンチモン合金を用いた極低温真空ポンプおよびその使用方法
【課題】高い体積比熱を有し、長期間の運転で劣化する恐れがなく、所望の形状に作製可能な、安全でしかも低コストの蓄冷材、当該蓄冷材を有する冷凍機、当該冷凍機を備えるクライオポンプ、および当該クライオポンプの動作方法を提供する。
【解決手段】本発明にかかる蓄冷材は錫−アンチモン(Sn−Sb)合金を含む。また、本発明にかかる冷凍機では、少なくとも1つの冷却段における蓄冷材が、錫−アンチモン(Sn−Sb)合金を含んでいる。
(もっと読む)
クライオポンプのネットワーク
【課題】全てのネットワークノード間で連続した通信が可能となる真空ネットワーク制御システムを提供する。
【解決手段】真空ネットワーク制御システムは、システムの動作プロセスを制御するために構成された複数のノードを含む。ネットワーク・リングまたは他のトポロジにおいては、複数のノードは、動作プロセスを制御するために選択されることができるマスタノードとして構成されている。制御は、各ノードに分散され、各ノード間で受け渡しされる。ネットワーク上の各ノードは、ネットワーク内の故障を検出するために、隣接するネットワーク接続を監視する。検出された故障に応答して、その故障に対して切断がマッピングされ、ノード間および外部装置と通信を続行するために、ネットワークトポロジが再構成される。
(もっと読む)
冷電子増倍放出源を備える電離真空計
【課題】劣化せず、BA型電離真空計の短所を持たず、かつ、チャンバ内の気体の化学種の化学組成を変化させることなく動作できる冷電子放出型の電離真空計、および気体圧力測定方法を提供する。
【解決手段】本発明の電離真空計は、マイクロチャンネルプレートを含む電子生成アレイ、イオン化体積空間およびイオンを収集する収集電極を備える。マイクロチャンネルプレートは、種となる電子を生成する生成源を有する電子生成部と、前記電子生成部によって生成された前記種となる電子を受けて前記電子を増倍する電子増倍部とを備えている。イオン化体積空間では、電子が気体の化学種と衝突してイオンを生成し、収集電極がこのイオンを収集する。
(もっと読む)
ロボット応用・形成データを記憶する交換自在なメモリ装置
【課題】ロボットドライブを交換・修理する際、再度学習させることを不要とし、保守性を向上すること。
【解決手段】ロボットドライブ14の操作及び設定パラメータが、該ドライブ装置若しくはその近傍に設置され、着脱可能な記憶装置に記憶され、学習ステーションを含むアームデザインやシステムレイアウトに関連するデータがロボットドライブに関連して保持され、記憶装置の再度のプログラムが不要となるため、ドライブシステムのインストールや交換という導入作業時間が最小で済む。マスターキーの形態をとる着脱可能な記憶装置は、ダラスキー(DallasKey)、イープロム(Eprom)等で具体化され、ロボット本体若しくはその近傍に固定される。従ってロボットドライブを交換する際にもとのキーを新しいロボット若しくはその近傍に固定すると、ロボットドライブは当初のロボットドライブの保有パラメータを全て承継する。
(もっと読む)
電磁推進及び誘導システムの整流
モータの整流方法には調整電気角、および整流方程式の共通セットにおける調整電気角の使用が含まれ、それによって整流方程式の共通セットがモータの中で1次元と2次元力の両方を生成することが可能になる。  (もっと読む)
(もっと読む)
セルフベアリングモータ用位置フィードバック
感知機構には、磁気源と、磁束センサと、磁気源および磁束センサが取り付けられたセンサ裏当てと、強磁性ターゲットとが含まれており、磁気源、磁束センサ、および強磁性ターゲットは、磁気源からターゲット、ターゲットからセンサ、およびセンサ裏当てを介して磁気源へと戻る磁気回路を形成するよう配置される。  (もっと読む)
(もっと読む)
多次元位置センサ
コントローラと、可動部と搬送経路とを有し前記コントローラと連通するワークピース搬送機と、前記可動部に固着した少なくとも1つの界生成プラテンと、搬送経路に沿って配置されコントローラと連通する少なくとも1つのセンサ群とを含み、前記界生成プラテンが位置計測とともに可動部を推進させるように構成される多次元測位装置とを備える装置であって、前記の少なくとも1つのセンサ群の各センサは、少なくとも1つの界生成プラテンで発生させる検知界内の単軸に沿ったばらつきに対応する1つのみの出力信号を提供するように構成され、前記コントローラは、前記の少なくとも1つのセンサ群の各センサに隣接した前記可動部の多次元位置を、前記の少なくとも1つのセンサ群内の少なくとも1つのセンサの前記1つのみの出力信号に基づいて、多次元位置には、少なくとも平面位置と、ワークピース搬送機と少なくとも1つの前記センサ群との間のギャップとを含めて算出するよう構成されている装置。 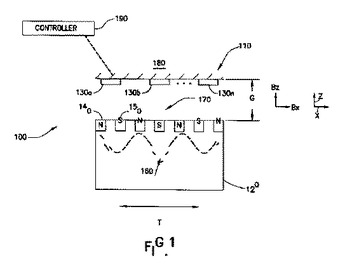 (もっと読む)
(もっと読む)
揚上機能および低コギングの特性を伴うモータ固定子
固定子と、固定子に対して少なくとも第1の方向に可動に装備された回転子であって、第1の方向にモータ力が生じるように固定子と動作的にインターフェース接続している、回転子と、を備えるモータであって、固定子は、回転子上で、少なくとも第1の方向と、第1の方向に対して角度をなす第2の方向とに、反コギング力を生じさせるように構成されている反コギング要素を備える。  (もっと読む)
(もっと読む)
21 - 30 / 81
[ Back to top ]