
NECネットワーク・センサ株式会社により出願された特許
11 - 20 / 71
砲撃体検出装置、砲撃体検出方法及び砲撃体検出プログラム
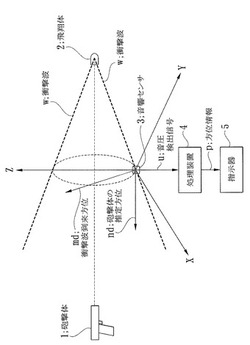
【課題】個人が携行可能な小型の砲撃体検出装置を提供する。
【解決手段】衝撃波検出手段(音響センサ3)により、砲撃体1から発射された飛翔体2(銃弾)が発生する衝撃波wの音圧が3次元方向で検出され、音圧検出信号uが出力される。砲撃体方位算出手段(処理装置4)により、衝撃波検出手段(音響センサ3)から出力された音圧検出信号uに基づいて、同衝撃波検出手段(音響センサ3)の位置を基準とする砲撃体1の推定方位ndが算出されて方位情報pが生成される。
(もっと読む)
パルス変調装置及びパルス変調方法

【課題】パルス変調後の信号の立上り及び立下りにおいてジッタが発生しないようにする。
【解決手段】 入力信号の周期を1/Nに分周するN分周回路3と、N分周回路3からの信号に同期して変調パルス信号を発生させる変調パルス発生回路4と、入力信号を変調パルス信号に同期してパルス変調するパルス変調回路5と、を備える。
(もっと読む)
高周波切替回路
【課題】簡単な回路構成によってPINダイオードの電荷を急速に除去することにより、高周波信号の伝送系統を高速で切り替えることができる高周波切替回路を提供する。
【解決手段】第1のマイナス電源(マイナス電源)4はNPN型のトランジスタ(第1の半導体スイッチ)2を介してPINダイオード(ダイオード)6に逆バイアス電圧を印加し、第1のプラス電源(プラス電源)5はPNP型のトランジスタ(第2の半導体スイッチ)3を介してPINダイオード6に順方向電流を供給する。第2のマイナス電源(マイナス電源)13はNPN型のトランジスタ(第1の半導体スイッチ)11を介してPINダイオード(ダイオード)15に逆バイアス電圧を印加し、第2のプラス電源(プラス電源)14はPNP型のトランジスタ(第2の半導体スイッチ)12を介してPINダイオード15に順方向電流を供給する。これにより、高周波信号の系統を高速切替できる。
(もっと読む)
PCM信号復調回路、該復調回路に用いられるPCM信号復調方法及びPCM信号復調プログラム
【課題】入力PCM信号にノイズが含まれている場合でも、高精度で復調するPCM信号復調回路を提供する。
【解決手段】復調タイミング判定手段(タイミング制御部24、ローカルクロック25、PLL26、エンベロープ予測部27)は、ゼロクロス検出信号zbを入力すると共にピーク検出信号pbを入力して入力PCM信号ibの1周期分の位相及び振幅を含むデータptを生成し、エンベロープデータとして蓄積して基準位相標本情報及び基準周期情報を作成すると共に、基準位相標本情報及び基準周期情報に基づいて、入力PCM信号ibの後続の周期の位相及び振幅の予測情報efを作成し、予測情報efと後続の周期の位相及び振幅とを比較して誤差が所定の範囲内にあるとき、復調タイミング信号tcを出力する。復調部28により、復調タイミング信号tcに同期して復調データmdが出力される。
(もっと読む)
電波測距装置及び電波測距方法
【課題】電波信号によって端末装置間の距離を測定するときに、受信レベルが低い状況下においても精度よく端末装置間の距離を測定できる電波測距装置を提供する。
【解決手段】フレーム間時間測定器19が、送信側である第1の端末装置1の基準クロックS83によって生成された基準フレーム信号S81と、受信側である第2の端末装置2からの受信信号を複号化して生成された復号フレーム信号S82との時間差の期間に発生した基準クロックS83の周期(パルス数)によって、端末装置間の距離情報を測定する。また、クロック位相差測定器20aが、基準クロックS83と、受信信号から再生された復調クロックS84との位相差を毎クロック測定して、その位相差の測定結果を平滑化した補正値を生成する。そして、クロック位相差測定器20aは、フレーム間時間測定器19が測定した距離情報に対して補正値を加算した補正後距離情報を出力する。
(もっと読む)
適応受信機、並びにそれに用いる適応整合フィルタのタップ係数演算回路及びタップ係数演算方法
【課題】QAMのような振幅成分の変化のあるデジタル変調方式で変調された受信信号が入力される場合にも、AMFの追随性を犠牲にすることなく、雑音が低減されたタップ係数を生成し、もって高品質の受信を可能とする。
【解決手段】複素共役器251は、受信信号(例えば、16QAM信号)の共役複素信号を出力する。複素乗算器252は、複素共役器251からの共役複素信号と参照信号との複素乗算を行う。振幅正規化回路253は、複素乗算器252から出力される複素乗算値の振幅を正規化する。時間平均回路254は、振幅正規化回路253から出力される信号を時間平均し、受信信号と参照信号との任意の期間の相関値を、AMFのタップ係数として出力する。振幅正規化回路253は、振幅成分の絶対値を常に単位円上の値に正規化するので振幅成分の誤差を除去できる。
(もっと読む)
水中吊下げ構造、その構造を備えた船舶および水中吊下げ方法
【課題】 所定の水深に精度良く水中音波センサ等の物体を沈めることができ、しかも、その物体の水深および姿勢を安定的に維持できる水中吊下げ構造を提供する。
【解決手段】 水中吊下げ構造1は、綱状部材2と吊下げ長さ調整部3とアーム4とアーム状態維持部11を備える。綱状部材2は、所定の吊下げ基部5から吊下げ対象物体6を吊下げる。吊下げ長さ調整部3は、綱状部材2の吊下げ基部5からの吊下げ長さLを調整する。アーム4は、吊下げ対象物体6に接続する接続部9と、所定の支持部8に固定される固定部7とを含む。アーム4は、吊下げ長さ調整部3による綱状部材2の吊下げ長さLに応じて接続部7が固定部9に対して進退方向に変位する機能を備えている。アーム状態維持部11は、接続部9と固定部7との間隔が、吊下げ長さ調整部3による綱状部材2の吊下げ長さLに応じた長さである状態を維持し、かつ、アーム4の不要な揺れを抑制する機能を備える。
(もっと読む)
バースト通信用変調装置、復調装置、変調および復調方法ならびに通信システム
【課題】 比較的低いデータレートで伝送されるMSK変調等の信号の復調が可能で、かつ断続的なバースト通信における復調において、同期確立までの時間を短縮させ、よって比較的短時間で復調が可能なバースト通信用変調装置および復調装置の提供。
【解決手段】 無変調信号を先頭にしてプリアンブル信号、同期信号およびデータを順次出力する切替器5と、切替器の出力信号を変調する変調器6と、変調器の出力信号を後処理する後処理器8とをバースト通信用変調装置81に含み、無変調信号は後処理器から出力される変調波を復調する復調装置82において同期確立までの時間を短縮するために用いられる。
(もっと読む)
移動通信システム、動作制御方法、基地局制御装置、無線基地局、移動局及びプログラム
【課題】 他の通信が無線チャネルを圧迫して所定の通信が妨げられることを抑制することができる移動通信システムを得る。
【解決手段】 本発明による移動通信システムは、一又は複数の無線基地局11と、無線基地局11の無線ゾーン11a内に当該無線ゾーン11aより小である無線ゾーン21a,22aを有する一又は複数の無線基地局21,22と、基地局制御装置30とを含む。基地局制御装置30は、所定の呼出番号と無線基地局11とを対応付けて記憶する記憶部31と、受信された発呼要求に含まれる呼出番号が記憶部31にある場合、記憶部31内の対応する無線基地局11を用いて発呼要求に含まれる呼出番号が割り当てられた移動局との通信を行う制御部32とを含む。
(もっと読む)
人工物検出システム、該システムに用いられる人工物検出方法及び人工物検出制御プログラム
【課題】広範囲の海底や水底に存在する人工物を、埋没している場合も含めて一度に効率良く検出することが可能な人工物検出システムを提供する。
【解決手段】海底又は水底Bに配置されている人工地震発生手段(たとえば、人工地震の震源11)により、人工地震が発生し、海中又は水中に配置されている振動波検出手段(たとえば、振動センサ12)により、人工地震により発生する音波が検出されると共に、同音波よりも速い伝搬速度で地震波qwを伝搬する海底又は水底Bから海中又は水中に放射される振動波が検出される。そして、人工物存在判定手段(たとえば、データ処理装置13)により、振動センサ12で検出される振動波のレベルが相対的に高くなるとき、同振動波の到来方位が検出され、同到来方位の海底又は水底Bに人工物HWが存在することが判定される。
(もっと読む)
11 - 20 / 71
[ Back to top ]