
Fターム[2B034AA02]の内容
Fターム[2B034AA02]に分類される特許
161 - 180 / 228
畦塗り機
【課題】硬さが均一な畦側面を形成できる畦塗り機を提供する。
【解決手段】畦塗り機は、土を盛り上げる盛土体と、盛り上げた土を締め固めて傾斜面状の畦側面を形成する略円錐台状の回転可能な畦側面形成体24とを備える。畦側面形成体24の縮径側端部には、土を締め固めて水平面状の畦上面を形成する略円筒状の回転可能な畦上面形成体25を設ける。畦上面形成体25は、土を畦側面形成体24側に向けて移動させる突部26を外周面に有する。突部26は、畦側面形成体24から離れるに従って回転方向に向う螺旋状に形成する。
(もっと読む)
畦形成機

【課題】 従来の畦成形機の畦成形部は、1つの円錐体によって畦の形成がなされるため、水分や土質による盛土の高さや性質に対応させた角度を保つことができない課題があった。
【解決手段】 走行機の後部に装着され、掘削爪を設け回転する耕耘ロータによって土を盛り上げる前処理部4と、前処理部4によって盛られた土を畦に形成する畦成形部3とを有する畦成形機において、畦成形部3は、複数の回転軸と、複数の回転軸間に回転可能に掛け渡される無端体32、7とを有し、複数の回転軸は、走行方向に交差する方向に互いに平行に設けられ、複数の回転軸の少なくとも1つを駆動回転軸30とし、該駆動回転軸30の前方に前方回転軸31を設け、かつ駆動回転軸30を中心に前方回転軸31を回動可能に設けたことを特徴とする畦成形機を提案する。
(もっと読む)
農作業機
【課題】作業手段を容易に所望の作業状態にできる農作業機を提供する。
【解決手段】農作業機は、トラクタの後部に連結する機枠を備える。機枠には、作業手段を平行リンクを介して左右位置変更可能に設ける。作業手段の可動機枠には制御ユニットを設け、この制御ユニットには操作ユニット49を接続する。操作ユニット49は、作業手段の状態を切り換えるための切換用操作手段51を有する。操作ユニット49は、トラクタに対応する設定作業位置を設定するための位置設定用操作手段52を有する。作業手段の格納状態時に切換用操作手段51を操作すると、作業手段が位置設定用操作手段52で予め設定した設定作業位置に位置する作業状態となる。
(もっと読む)
畦塗り機
【課題】畦塗り作業を性能が高い状態で安定して行う。
【解決手段】畦塗り機は、前側から旧畦Kの上部を切り崩す天場処理部50、旧畦を切り崩して土盛りを行う前処理部60、盛られた土を切り崩された旧畦上に塗り付ける整畦部を備える。天場処理部50に動力を伝達する天場動力伝達フレーム52は、一端側が前処理ロータの回転中心軸に繋がる連結軸63の先端部に回動自在に取り付けられ、他端側が天場処理部60の回転中心軸に繋がる従動軸56に連結されて、連結軸63を回動中心として上下方向に回動可能である。天場動力伝達フレーム52は、基端側が旧畦Kの内側面Ksに沿って延び、先端側が旧畦Kの天場Ktに沿って延びて、旧畦Kの天場Kt及び内側面Ksの間に空間部80を形成する。
(もっと読む)
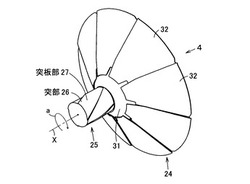
畦塗り機
【課題】硬さが均一な畦側面を形成できる畦塗り機を提供する。
【解決手段】畦塗り機は、土を盛り上げる盛土手段と、回転中心軸線Xを中心として回転しながら盛土を締め固めて畦側面を形成する略円錐台状の畦側面形成体27とを具備する。畦側面形成体27は、回転中心軸線を中心として放射状に位置する複数の作用面部31を備える。各作用面部31は、回転方向後側に接触面32を有し、回転方向前側に非接触面33を有する。畦側面形成体27の縮径側では、一方の作用面部31の接触面32と他方の作用面部31の非接触面33との境界線である縮径側境界線Aが畦側面形成体27の径方向に沿って位置する。畦側面形成体27の拡径側では、一方の作用面部31の接触面32と他方の作用面部31の非接触面33との境界線である拡径側境界線Bが畦側面形成体27の径方向に対して回転方向側にずれて位置する。
(もっと読む)
農作業機
【課題】走行車のバック走行が不要で、効率よくオフセット作業ができ、しかも、圃場の隅部での未作業部分の長さが短く、未作業部分に対する人力作業負担の軽減を図ることができる農作業機を提供する。
【解決手段】農作業機1は、トラクタ2の後部に連結し、トラクタ2の前進走行により移動しながら作業部5でオフセット作業である畦塗り作業をする作業機本体3を備える。農作業機1は、作業機本体3をトラクタ2に対して回動させる伸縮手段4を備える。圃場の隅部において、トラクタ2が前進走行しながら左右いずれか一方に向って旋回する場合、曲率半径が非伸縮円弧状軌跡Bの曲率半径より小さい伸縮円弧状軌跡Aを描くように、作業部5が伸縮手段4の伸縮に基づいて圃場の隅部の角位置Pの近傍を円弧状に移動する。
(もっと読む)
畦塗り機及びその作業部向き調整方法
【課題】圃場の隅まで連続的に畦塗り作業を行なう。
【解決手段】畦塗り機1は作業部30を旧畦U0の一辺Faに沿うように作業部の向きを調整可能な作業部位置調整装置61を有する。作業部位置調整装置61は、オフセットフレーム10の後端部に回動自在に設けられた作業部30の向きが旧畦U0の一辺Faと略平行にあるか否かを走行機体80から目視確認可能なマーカ64と、オフセットフレーム10を旋回動させる旋回シリンダ13及び作業部30を回動させる回動シリンダ57の動作を操作可能なアクチュエータ操作装置67を有する。走行機体80に搭乗した作業者Mは、マーカ64を目視して作業部30の向きが一辺Faと略平行になるようにアクチュエータ操作装置67を操作する。
(もっと読む)
農作業機
【課題】適切なオフセット作業ができる農作業機を提供する。
【解決手段】農作業機である畦塗り機10は、トラクタTの後部に連結する固定機枠11を備える。固定機枠11に伸縮可能な回動体21の前端部を上下方向の第1回動中心軸線X1を中心として回動可能に連結する。回動体21の後端部に可動機枠22を上下方向の第2回動中心軸線X2を中心として回動可能に連結する。可動機枠22には畦塗り手段23を設ける。圃場の隅部におけるトラクタTの前進旋回時に、固定機枠11に対する回動体21の回動と回動体21の伸縮と回動体21に対する可動機枠22の回動とに基づき、畦塗り手段23が前方に向って直線状に移動しながら畦塗り作業をする。
(もっと読む)
畦塗り機
【課題】畦側面の硬さバランスが良好な崩れにくい畦を形成できる畦塗り機を提供する。
【解決手段】畦塗り機は、土を盛り上げる盛土手段と、盛土を締め固めて畦を形成する畦形成手段4とを具備する。畦形成手段4は、略円錐台状のベース体31と、このベース体31に設け畦側面を形成する作用板群32とを備える。作用板群32は、1枚の拡径側段差低作用板32aと、1枚の拡径側段差高作用板32bと、4枚の段差同一作用板32cとを組み合わせて構成する。
(もっと読む)
農作業機
【課題】上面切削手段にて元畦の上面部を適切に切削でき農作業機を提供する。
【解決手段】農作業機1は、土を耕耘して元畦上に盛り上げる盛土手段23と、盛土手段23による盛土を締め固めて畦を形成する畦形成手段31とを備える。畦形成手段31の前方位置には、元畦の上面部を切削する上面切削手段41を配設する。盛土手段23の畦形成手段31に対する上下方向位置は、電動油圧シリンダ48にて変更可能である。盛土手段23の畦形成手段31に対する上下方向位置の変更に拘わらず、上面切削手段41の畦形成手段31に対する上下方向位置を一定に維持する位置維持手段51を設ける。
(もっと読む)
畦塗り機
【課題】土質等に影響されずに常に良好な畦整形ができ、長時間使用ができ、散水量を少なくしても供給性能が低下しない液体供給装置を備えた畦塗り機を提供する。
【解決手段】畦塗り機1のヒッチフレーム12に水供給装置60のタンク61を取り付ける。タンク61にはモータ駆動のポンプ63が装備され、ポンプ63は配管65を介して整畦体53を覆うカバー部57に取り付けられたノズル67に連通する。ノズル67は、多面体ドラム55の表面に臨む位置に配置される。モータは制御装置69によって作動が制御され、制御装置69は走行機体90に設けられた操作スイッチ71のダイヤル操作によってモータを作動させて多面体ドラム55の表面に水を間欠的に供給させる。操作スイッチ71のダイヤル調整によって間欠時間を連続状態から調整可能である。タンク61内の水はポンプ63により加圧されてノズル67から吐出する。
(もっと読む)
農作業機
【課題】畦の端まで連続的に畦塗り作業ができるばかりでなく、大きさの異なる各トラクタに適切に対応できる農作業機を提供する。
【解決手段】農作業機1は、トラクタに連結する固定機枠2を備える。固定機枠2には、回動伝動ケース体11の前端部を上下方向の軸線X1を中心として回動可能に連結する。回動伝動ケース体11の後端部には、可動機枠21を上下方向の軸線X2を中心として回動可能に連結する。可動機枠21には、圃場の隅部においてトラクタの前進旋回により畦に沿って前方に移動しながら畦の端部まで畦塗り作業をする畦塗り手段23を設ける。固定機枠2と可動機枠21との間には、第1伸縮体41および第2伸縮体42をそれぞれ設ける。固定機枠2および可動機枠21の各々は、複数の第1被取付部13a,13b,33a,33bおよび複数の第2被取付部14a,14b,14c,34a,34b,34cを有する。
(もっと読む)
整畦機
【課題】機枠に整畦機枠を畦の進行方向に対して交差する方向に吊下状に垂直旋回案内可能な吊下案内機構を設け、整畦機枠に畦面を回転整畦可能な回転整畦体をもつ整畦機構を設け、整畦機枠を整畦作業位置及び非作業位置の間で垂直旋回させる垂直旋回機構を設けてなるから、整畦機枠を吊下案内機構及び垂直旋回機構により整畦作業位置及び非作業位置の間で垂直旋回させることができ、このため、運搬走行時等の非作業位置において運搬走行時等の走行安定性を高めることもできる。
【解決手段】走行機体1に連結機構2により機枠3を連結し、機枠に整畦機枠6を畦Wの進行方向に対して交差する方向に吊下状に垂直旋回案内可能な吊下案内機構6aを設け、整畦機枠に畦面を回転整畦可能な回転整畦体5をもつ整畦機構4を設け、整畦機枠を整畦作業位置D及び非作業位置Hの間で垂直旋回させる垂直旋回機構7を設けてなる。
(もっと読む)
農作業機
【課題】走行車の走行速度を速くしても、安定した畦を得ることができる農作業機を提供する。
【解決手段】農作業機1は、トラクタの後部に連結する機体2を備える。機体2には、土を耕耘して元畦上に盛り上げる盛土手段3を設ける。機体2には、盛土手段3による盛土を締め固めて畦Aを形成する畦形成手段4を設ける。畦形成手段4は、スリップ回転しながら畦形成作業をする第1畦形成体31と、第1畦形成体31の後方位置でスリップ回転しながら畦形成作業をする第2畦形成体32とを有する。
(もっと読む)
整畦機
【課題】機枠に整畦機枠を畦の進行方向に対して交差する方向に吊下状に垂直旋回案内可能な吊下案内機構を設け、整畦機枠の一方側部に畦面を回転整畦可能な回転整畦体をもつ主整畦機構を設けると共に整畦機枠の他方側部に畦面を回転整畦可能な回転整畦体をもつ副整畦機構を設けてなるから、走行機体の作業運転性を向上することができる。
【解決手段】走行機体1に連結機構2により機枠3を連結し、機枠に整畦機枠6を畦Wの進行方向に対して交差する方向に吊下状に垂直旋回案内可能な吊下案内機構6aを設け、整畦機枠の一方側部に畦面を回転整畦可能な回転整畦体5をもつ主整畦機構4aを設けてなる。
(もっと読む)
畦成形装置
【課題】トラクタに連結して畦を成形する際、畦成形部の直進性を良くすると共に、畦角部成型時にトラクタが旋回し畦から遠ざかっても畦に平行に畦成形部が畦成形可能な畦成形装置を提供する。
【解決手段】トラクタTに装着される装着フレーム2が、トラクタTに装着される第1フレーム25と、第1フレーム25に対して移動自在であると共に連結部3と回動自在に連結される第2フレーム26とからなる。連結部3による装着フレーム2と畦成形部43との連結は、回動固定あるいは回動自在である。畦成形部43の畦成形方向と平行であると共に連結部3の回動中心を通る直線の近傍位置であって且つ畦成形部43の進行方向後方側に位置する抵抗輪6を備え、畦成型時に畦成形部43からの反力に抗する。
(もっと読む)
畦塗り機の位置センサ取付構造
【課題】作業部の位置制御の安定性が低下し及びセンシングアームが損傷する事態を防止する位置センサ取付構造を提供する。
【解決手段】畦塗り機の位置センサ取付構造は、整畦部25に接続されて整畦部25の支持ケース29側端部に沿って延びて先端部が支持ケース29に回動自在に接続されたドラムケース53を設け、ドラムケース53と平行に配置されて先端部が支持ケース29に回動自在に接続されたリンクロッド63を設け、ドラムケース53及びリンクロッド63の各後端部を接続する連結部材を設けて、ドラムケース53、リンクロッド63及び連結部材によって平行リンク機構を構成し、連結部材に位置センサ27の取り付けアーム27cを上下方向に回動自在に取り付ける。
(もっと読む)
畦塗り機
【課題】操作の熟練が不用でトラクタの大きさや圃場条件の変化に拘わらず、連結機構部を所望のオフセット角度を有した位置に容易に移動させる。
【解決手段】畦塗り機1は、トラクタの走行方向が変化して作業部20の作業位置、作業方向が変化するとオフセットシリンダ50及び方向シリンダ31の伸縮を制御して直線状の畦塗り作業を維持する自動直進作業制御モードを実行しているときにトラクタが畦Uから離反する方向に旋回して畦Uに対する連結機構部40のオフセット角度θが所定値になると、自動直進作業制御モードの実行を中止するコントローラを装備する。畦Uに対する連結機構部40のオフセット角度θは装着部10に対する連結機構部40の揺動角度を検出する揺動角センサからの検出値と連結機構部40の移動端側に対する作業部20の回動角度を検出する回動角センサからの検出値をもとに算出される。
(もっと読む)
畦塗り機
【課題】大型化を防止し、前処理部が装着部に接触する虞がなく、作業部を通常作業位置に移動させる際のスイッチ操作を容易にする。
【解決手段】畦塗り機1は、装着部10に対する連結機構部40のオフセット角度を検出するオフセット角センサ52と、連結機構部40の移動端側に対する作業部20の回動角度を検出する回動角センサと、走行機体の走行に沿って作業部20が作業可能な通常作業位置に作業部20を移動させる際に操作される通常位置復帰スイッチを備える。連結機構部40はオフセットシリンダの伸縮によって左右に揺動し、作業部20は方向シリンダ31によって回動する。コントローラは、センサからの各検出値を考慮して作業部20が装着部10等に設けられた装備品に接触することがないようにオフセットシリンダ及び方向シリンダ31の作動を制御し、通常位置復帰スイッチがON操作されると、作業部20が通常作業位置に移動するように各シリンダの作動を制御する。
(もっと読む)
農作業機
【課題】アクチュエータの可動速度を可変制御することで作業体の微妙な動きを実現できる農作業機を提供する。
【解決手段】農作業機1は、中央の作業機本体2と、この作業機本体2に位置変更可能に設けた左右の折畳作業体3とを備える。農作業機1は、折畳作業体3を位置変更させるアクチュエータ11と、このアクチュエータ11の可動速度を可変制御する制御手段12とを備える。制御手段12は、折畳作業体3が展開作業位置に位置する直前からその展開作業位置に位置するまでの間、アクチュエータ11の可動速度を通常速度より遅くする。
(もっと読む)
161 - 180 / 228
[ Back to top ]