
Fターム[2B041HA03]の内容
農業機械一般(連結、尾輪、PTO等) (4,416) | 連結、PTO、尾輪等の制御 (292) | 検出(入力信号) (77) | 車両又は作業機の状況 (77) | 原動機又はPTO装置 (21)
Fターム[2B041HA03]に分類される特許
1 - 20 / 21
農作業機
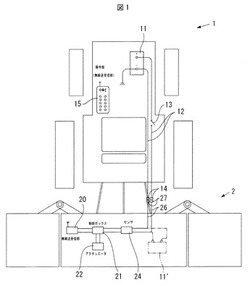
【課題】トラクタに装着して農作業を行う農作業機であって、アクチュエータの作動により途中に介在するクラッチ等の破損を防止する農作業機を提供することを目的とする。
【解決手段】トラクタ1に装着して、トラクタ1からの動力を入力軸51を介して伝達し中間にクラッチ82、83を設けた伝動部で伝達して農作業を行い、クラッチ82、83を介して接続されている農作業機の一部をアクチュエータ22により動かすことが可能な農作業機において、クラッチ82、83より動力源側の伝動部の回転を検知するセンサ24と、アクチュエータ22を操作するための操作部15と、制御部21とを有し、制御部21は、操作部15からアクチュエータ22を作動させる操作信号を受信し、かつ、センサ24が回転を検知していない場合、アクチュエータ22を作動させる。
(もっと読む)
作業車の制御システム

【課題】PTO軸の回転数が最大回転数を超えないようにエンジンの出力回転数を制限する状態から制限しない状態への切り換えに伴って車体が急加速する不都合の発生を阻止できるようにする。
【解決手段】設定手段Aで設定した設定回転数が得られるようにエンジン2の出力回転数を制御する制御手段25に、PTO軸の回転数が予め設定した最大回転数を超えないようにエンジン2の出力回転数を制限する制限手段25Cを備え、制限手段25Cが、指令手段Bからの出力に基づいてエンジン2の出力回転数を制限する実行状態と制限しない停止状態とに切り換わるように構成した作業車の制御システムにおいて、制御手段25に、指令手段Bからの出力に基づく制限手段25Cの実行状態から停止状態への切り換えに伴うエンジン2の出力回転数の急上昇を阻止する急上昇阻止手段25Dを備える。
(もっと読む)
トラクタ
【課題】エンジンのストールを防止するとともに、燃費の良い状態で作業を継続して行うことができるトラクタを提供する。
【解決手段】エンジンと、ロータリ耕耘装置と、昇降アクチュエータと、制御装置と、を備えるトラクタであって、制御装置は、エンジンのエンジン回転数Nrとエンジンの正味平均有効圧力Pmとの関係を示すマップにおいて予め設定される低燃費領域Zを記憶し、出力検出手段により検出されるエンジンの出力に基づいてエンジンの負荷率を算出し、エンジン回転数Nr及び正味平均有効圧力Pmが低燃費領域Zに含まれ、かつ負荷率が上昇用設定負荷率(設定負荷率)以上である状態が上昇用設定時間(設定時間)以上継続した場合、ロータリ耕耘装置を設定角度(設定上昇量)だけ上昇させる。
(もっと読む)
農走行作業機の伝動装置
【課題】 走行停止状態のときは、この走行停止状態のときにおいて作業装置が連動されることが必要であるときのみ、PTO軸を駆動し、走行停止状態において作業装置の連動駆動を要しないときは、PTO軸を駆動しない形態とする。
【解決手段】 土壌面を滑走均平するフロート1を有し、マット苗を収容して左、右方向へ往復移動しながら苗分離口2へ苗を繰出す苗タンク4と、この苗分離口2に作用して分離保持する苗を前記フロート1で均平される土壌面に植付ける苗植爪5と等からなる苗植装置6を、車体7のヒッチ8部に装着してPTO軸9で連動し、この苗植装置6に代えて別種の作業装置を装着可能に構成し、この作業装置の種別を判別する作業判別センサを設け、この作業判別センサによる検出によって車体7の走行停止状態における前記PTO軸9を駆動し、又は停止状態に牽制する。
(もっと読む)
作業機のパルス信号出力構造
【課題】作業機を走行停止させるための走行用動力の遮断操作を行なった後の作業機の慣性走行によって、作業機に連結した作業装置が無駄に作動することを防止する。
【解決手段】作業機に連結した作業装置14に作業機の情報をパルス信号に変換して出力するパルス信号出力手段22Bを備えた作業機のパルス信号出力構造において、走行用動力の回転数を検出する回転センサ23の出力に基づいて走行速度を演算する演算手段22Aと、作業機の進行方向を出力する進行方向出力手段Aと、走行用動力の断続情報を出力する走行用断続情報出力手段Bを備え、パルス信号出力手段22Bが、演算手段22Aの出力に基づいてパルス信号の周波数を変更し、かつ、進行方向出力手段Aの出力と走行用断続情報出力手段Bの出力に基づいて、パルス信号による作業機の走行状態の判別が可能となるようにパルス信号のデューティ比を変更するように構成してある。
(もっと読む)
農作業機
【課題】トラクタからの回転動力を伝達する伝動部の途中に有する動力伝達部で回転差が生じているか否かを検出するトラクタに装着する農作業機を提供することを目的とする。
【解決手段】トラクタからの回転動力を入力し入力した回転動力を伝動部で伝動させて作業部で出力して農作業を行うトラクタに装着する農作業機において、伝動部に一定条件下での動力を伝達する動力伝達部10を介在し、動力伝達部10より入力側の伝動部の回転を検知する第1の検知部4と、動力伝達部10より出力側の伝動部の回転を検知する第2の検知部5と、2つの検知部4、5からの情報を取得し動力伝達部10で回転差が生じているか否かを検出する制御部2とを有することで上記課題を解決する。
(もっと読む)
作業車両
【課題】エンジンやPTO軸の回転数を、既存の機器を用いることで効率的、かつ正確に計器パネルに表示できるとともに、型式の異なる車両生産においても、部品としての計器パネルを共用可能とし、コストダウンおよび生産性を向上させた作業車両を提供する。
【解決手段】エンジン発電機100を近傍に備えるエンジン6と、このエンジン6からの動力を作業機21に伝達するPTO軸60と、このPTO軸60およびエンジン6の回転数を、制御部109を介して表示する表示部19とを備え、エンジン発電機100は、このエンジン発電機100から発生するパルス信号を測定する信号測定部107を整流回路99に備え、制御部109は、信号測定部107が得たパルス信号に基づいて、エンジン発電機100の実回転数を介して算出したエンジン6およびPTO軸60の演算回転数を表示部19に表示する。
(もっと読む)
作業機
【課題】本発明は、旋回に係る操作性を大幅に高めることができる作業機を提供することを課題とする。
【解決手段】作業機10は、エンジン12の動力を断接するクラッチ24を備え、このクラッチ24にクラッチ24の断接状態を検出するクラッチスイッチ52を備え、アタッチメント部19に、作業部を作業位置(OP)と、この作業位置(OP)より高い待機位置(WP)とに調整することができる作業部位置調整機構41を備え、クラッチ24が接続されているとのクラッチスイッチ52の情報を受け、且つ、作業部が作業位置(OP)にあるという作業位置検出スイッチ75の情報を受けたときにエンジン12の回転速度を高速になるように制御部94を備える。
(もっと読む)
耕耘機
【課題】本発明は、旋回に係る操作性を大幅に高めることができる耕耘機を提供することを課題とする。
【解決手段】耕耘機10は、エンジンの動力を断接するクラッチ22を備え、このクラッチ22にクラッチ22の断接状態を検出するクラッチスイッチ23を備え、機体11に、操作ハンドル16を通常の操作高さと低位高さとに調整することができるハンドル高さ調整機構を備え、クラッチ22が接続されているとのクラッチスイッチ23の情報を受け、且つ、操作ハンドル16の高さが通常の操作高さにあるという低位検出スイッチ57の情報を受けたときにエンジン12の回転速度を高速に制御する制御部84を備える。
(もっと読む)
作業機
【課題】本発明は、駐車ブレーキが制動状態にあるとき、誤って機体を走行させ、駐車ブレーキが磨耗するという問題を解消するとともに、駐車ブレーキレバーとクラッチレバーの配置自由度を高めることができる作業機を提供することを課題とする。
【解決手段】作業機としての耕耘機10は、エンジンの動力を断接するクラッチ51を備え、このクラッチ51にクラッチ51の断接状態を検出するクラッチスイッチ52を備え、機体11に、駐車ブレーキ機構30および駐車ブレーキスイッチ49を備え、クラッチ51が接続されているとのクラッチスイッチ52の情報を受け、駐車ブレーキ機構30が非制動状態にあるという駐車ブレーキスイッチ49の情報を受けたときにエンジン12の回転速度を高速に制御する制御部84を備える。
(もっと読む)
耕耘機
【課題】本発明は、旋回に係る操作性を大幅に高めることができる耕耘機を提供することを課題とする。
【解決手段】耕耘機10は、機体11にエンジン12を備え、このエンジン12から耕耘爪14に駆動力を断接するクラッチ22を備え、機体11に機体11の傾き角度を検出する傾斜角検出センサ20を備え、クラッチ22が接続されているとのクラッチスイッチ の情報を受け、機体11の傾き角度が水平面に対して所定角度範囲内にあるという傾斜角検出センサ20の情報を受けたときにエンジン12の回転速度を高速になるように制御する制御部57を備えている。
(もっと読む)
農用トラクタ
【課題】インプルメントをトラクタ本機の走行速度に対応して作動制御することができるのみならず、インプルメント制御用信号によりPTO動力の出力状態を認識できるようにする。
【解決手段】トラクタ本機1に備えた主制御装置16に、トラクタ本機1の走行速度Vの大きさに対応したインプルメント制御用信号Eを出力する出力手段と、PTO検出センサ14からの検出に基づいてインプルメント制御用信号Eを補正する出力補正手段とを備えてある。
(もっと読む)
水田用作業機
【課題】 多目的化を図った作業機において、転倒などの不都合を招くことなく機体を安定的に走行させるための操縦操作が行われやすくする。
【解決手段】
走行機体1に対する作業装置20の着脱を検出する手段50,51,53と、車速の検出または算出手段60とを備え、作業装置20を外しての走行時には、所定走行速度以上で、作業装置が取り付けられていない状態での走行であることを警告する報知手段15を備えた。
(もっと読む)
作業車のPTOクラッチ操作構造
【課題】 作業車のPTOクラッチ操作構造において、昇降レバー及びポジション制御手段を備えた場合、作業装置の昇降駆動に応じてPTOクラッチを適切に伝動及び遮断状態に操作することができるように構成する。
【解決手段】 所定範囲A1に亘って人為的に操作される昇降レバー12を備えて、ポジション制御手段を備える。所定範囲A1の上限位置A3よりも下降側に第1PTO切換位置A4を設定し、第1PTO切換位置A4よりも下降側に第2PTO切換位置A5を設定する。昇降レバー12が第1PTO切換位置A4を越えて上昇側に操作されると、PTOクラッチ29を遮断状態に操作し、昇降レバー12が第2PTO切換位置A5を越えて下降側に操作されると、PTOクラッチ29を伝動状態に操作する。
(もっと読む)
作業車のPTOクラッチ操作構造
【課題】 作業車のPTOクラッチ操作構造において、昇降レバー及びポジション制御手段を備えた場合、作業装置の昇降駆動に応じてPTOクラッチを適切に伝動及び遮断状態に操作することができるように構成する。
【解決手段】 所定範囲A1に亘って人為的に操作される昇降レバー12を備えて、ポジション制御手段を備える。所定範囲A1の上限位置A3よりも下降側にPTO切換位置A4,A5を設定する。昇降レバー12がPTO切換位置A4,A5よりも下降側に位置すると、PTOクラッチ29を伝動状態に操作し、昇降レバー12がPTO切換位置A4,A5よりも上昇側に位置すると、PTOクラッチ29を遮断状態に操作する。
(もっと読む)
農作業機械
【課題】 ロータリ耕耘機付きのトラクタにおいて、エンジンストールを招来することなく、ロータリ耕耘機の上昇動時に形成される耕耘跡穴及び盛土の大きさを小さくできるようにする。
【解決手段】 走行機体2には、エンジン回転数NEを検出するエンジン回転センサを備える。エンジン制御コントローラは、ロータリ耕耘機が耕耘位置から非耕耘位置に上昇動するとき、エンジントルクTEが所定値TE0より低くなるのを抑制しながらエンジン回転数NEを下限回転数NE0にまで低下させ、これに連動してPTO回転数NPを適宜低下させる。
(もっと読む)
自走式管理機
【課題】 エンストを確実に回避することのできる制御機能を備えた管理機を提供することを課題とする。
【解決手段】 指令値変換部61に第1速度指令値C1及び速度比(Vact/Vset)を読込み、(Vact/Vset)×C1=C2の演算により、第2速度指令値C2を出力する。左の流体変速機22Lの出力軸47Lの回転速度を走行速度検出手段52Lで検出する。左変速機制御部62Lは走行速度検出手段52Lで検出した実回転速度と第2速度指令値C2とを比較して、実回転速度が第2速度指令値C2に近似するようにモータドライバー63Lを介して制御用モータ48Lを駆動する。右変速機制御部62Rも同様である。これにより第2次速度指令値はエンジンへの負荷が大きいほど小さくなる。この結果、エンストを回避することができる。さらに、作業者が減速操作をする必要はなく、自動的にエンジン負荷に応じて走行速度を制御する。
(もっと読む)
PTO軸回転数制御装置
【課題】PTO軸の上限回転数が予め設定しておいた所望の回転数に制限されるように構成し、PTO軸の回転数が回転上限値に達したとき、連動駆動しているエンジンの回転数がアクセルペダルをさらに踏み込んでもそのときの回転数以上に上昇しないよう制限するPTO軸回転数制御装置を提案するものである。
【解決手段】機体にPTO軸11を備え、エンジン4からの動力をPTO軸11に伝えて作業機を駆動可能に構成し、エンジン4の回転数を設定する手段と、該設定手段で設定した回転数となるように制御するコントローラ20を備えたPTO軸回転数制御装置であって、PTO軸11の回転数の上限値を設定するPTO軸回転数設定手段と、エンジン4の出力軸の回転数を検知する手段とを備え、エンジン4の回転数を設定する手段をPTO軸11の回転数の上限値を越える操作をしても、PTO軸11は上限値を越えないようにエンジン4を制御した。
(もっと読む)
作業車両の制御装置
【課題】負荷が急変する場合には、エンストが発生しないように減速できる負荷制御が容易にできる作業車両の制御装置を提供する。
【解決手段】変速比設定ダイヤルにて変速比パターンを設定する。前進(後進)ペダルの踏込み量を読込む。読み込み数値に基づいて、選択された変速比パターン上のペダル踏込み量に対応する目標変速比値を算出する。負荷制御モード切替スイッチ222aをONにする。副変速機が低速でエンジン回転数が所定値以下で負荷制御が実行される。エンジン負荷が適正負荷のときには、選択された変速比パターン上のペダル踏込み量に対応する目標変速比値を維持する。負荷が大負荷であるときには、エンジン回転数低下率が所定値C%(実施例では5%)未満になるまで、目標変速比値を下げるように制御する。負荷が小負荷であるときには、当該エンジン負荷の検出値が100%になるまで、目標変速比値を上げるように制御する。
(もっと読む)
作業車両の制御装置
【課題】従来正確な負荷変動が検知できなかったので、エンジンの回転数と燃料噴射量からトルクを演算して、該トルクの変化状態を作業時において検知し、そのトルク変化が所定の形状となるとスリップしたと判断し、このスリップが生じないように制御する。
【解決手段】電子制御式燃料噴射装置を具備し、サイクル毎の噴射量を演算する手段を備えたディーゼルエンジンを搭載した作業車両において、該エンジンのクランク軸25の回転を検知する手段33と、作業車両に装着した作業機7と、燃料噴射装置の噴射量制御手段と、作業機の昇降を制御する手段と、作業車両速度制御手段とを備え、燃料噴射量とエンジン回転数によりエンジントルクを演算し、予め任意に設定した所定時間内に急激なトルクの上昇の後に急激なトルクの低下があり、そのトルクが任意に設定した時間持続すると車輪がスリップしたと判断する。
(もっと読む)
1 - 20 / 21
[ Back to top ]