
Fターム[2B054EA16]の内容
播種 (2,178) | 検出又は制御 (121) | センサの構成又は配置 (29) | 取付け又は配置 (7)
Fターム[2B054EA16]に分類される特許
1 - 7 / 7
粉粒体供給装置
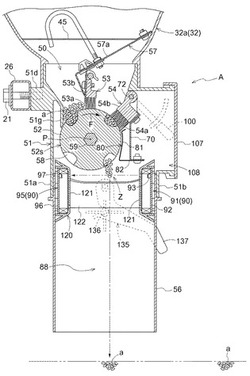
【課題】全調節範囲のいずれの繰出し量に調節された場合でも繰出し回転体からの粉粒体の落下を検出できる粉粒体供給装置でありながら、検出センサを小型に済ませる。
【解決手段】繰出し凹部58の開口面積を変更することによって、繰出し回転体52の繰出し凹部58による繰出し量を変更する。繰出し回転体52からの粉粒体aを圃場に向けて落下させる落下供給路88における粉粒体aの落下を検出する検出センサ90を設けてある。検出センサ90の落下供給路88を横断する方向での検出域が、落下供給路88のうちの繰出し凹部58による繰出し量を最多量にするように繰出し量調節された繰出し回転体52からの粉粒体aが落下する部位よりも小の部位であって、繰出し凹部58による繰出し量を最少量にするように繰出し量調節された繰出し回転体52からの粉粒体aが落下する部位に位置している。
(もっと読む)
水田作業機

【課題】詰まりを容易に除去でき、作業負担の低減を図ることができる水田作業機を提供する。
【解決手段】粉粒体mを貯留可能なホッパと、ホッパに貯留された粉粒体mを所定量づつ繰り出す繰出部と、繰出部から繰り出された粉粒体mを搬送する管部28と、管部28によって搬送された粉粒体mを田面に供給する供給部83と、管部28と供給部83とを接続する接続部84と、を備え、粉粒体mの詰まりを検出するセンサ部93を供給部83または接続部84に設けると共に、開閉可能な蓋95を有する開口96を供給部83または接続部84に設けてある。
(もっと読む)
多目的農作業機
【課題】直播装置82と苗植付部4などトラクタ本体に装着可能な装置側に高価なセンサを設置することなくローリング制御ができる多目的農作業機を提供すること。
【解決手段】 走行車体2の後部に複数条分の種子を圃場に播くための直播装置82又は複数条分の苗を圃場に植え付けるための苗植付部4を車体2に対して昇降自在に且つ着脱自在に設け、車体2の後部に圃場面を整地するロータ27,27をロータ昇降リンク66を介して設け、該ロータ昇降リンク66に水平センサ81aを取り付けたので、作業装置を取り替えても前記左右傾斜センサ81aを利用することができる。
(もっと読む)
シーダーテープ繰出し検知装置
【課題】シーダーテープ繰出し検知装置の側板の回転を検出し、側板の回転が停止したと判定した時に警報等を発生することができるシーダーテープ繰出し検知装置を提供する。
【解決手段】少なくとも1個の回転検出用の検出板21がシーダーテープリール10の側板11に配置されている。近接センサ22は、シーダーテープリール10を回転可能に支持する播種機側で検出板21の回転経路を望む位置に設けられている。判定回路25は近接センサ22の出力が予め定めた一定期間以上変化しないときにシーダーテープの繰り出しの不具合を示す信号を発生する。警報発生器28は前記不具合を示す信号に基づいて警報を発生する。
(もっと読む)
育苗用播種機
【課題】従来の育苗用播種機では、位置センサで播種位置を検知して自動的に播種するためには特殊な苗箱が必要とされ、平皿状や発泡スチロール製等の一般の苗箱を使用することができない、という問題があった。
【解決手段】苗箱12には、位置センサ15が検知可能な被検知体11を着脱自在に設け、該被検知体11による検出信号に基づいて前記播種位置に播種可能な構成とし、更に、該被検知体11は、遮蔽部26cと空間部26dとを備え、該遮蔽部26cと空間部26dとの間で変化する検出信号に基づいて前記播種位置に播種する。
(もっと読む)
自走式一人乗用型種いも植付機
【課題】運転に注意を集中することにより、種いも蒔き付け作業に振り向ける注意力が減少しても、蒔き付け作業を適切に行なえて、種いも植え付け畝間を一定に保ち易く、その後の農作業に適したものになる。
【解決手段】車体2の種いも蒔付用開口部6に臨ませて畝立用培土器24を設置し、その畝立用培土器24に、左右の犂刃25を両前端が閉じて後方に行く程開くようにV字状に配置し、その両犂刃25間の後部側に後端が上がって前方に行く程下がる傾斜したガイド上面を有する種いも蒔付用ガイド部材27を、両犂刃25の上端より少し下げて掛け渡し、その前部側に上下に貫通する蒔付口28を設けた種いも蒔付ガイド付きV形状犂を設置する。そして、更に種いも蒔付タイミング音発生装置を設置し、補助運転用ハンドル61を装着脱可能にして備えると好ましくなる。
(もっと読む)
繰り出しロ−ラを駆動するモ−タの回転数制御による、施肥・播種機、薬剤散布機における、繰り出し量確認調整装置。
【課題】実テスト走行をして実繰り出し量により、目標設定値を増減する修正の必要がなく、定置状態における正確な実繰り出し量を測定するだけで、想定以外の肥料・種子・薬剤に対しても目標設定値に正確に短時間で合わせられる装置を提供する。
【解決手段】想定される作業速度に対応した作業速度パルスを、繰り出し量確認調整装置11からコントロ−ラ6に入力して、繰り出しロ−ラ駆動モ−タ2の回転数制御をし、テスト走行をしないで停止した状態のままで肥料・種子・薬剤を繰り出す。繰り出された肥料・種子・薬剤は地面上で受けて回収し、重量を測定する。この測定重量より10a当たりの繰り出し量を算出して、コントロ−ラ6の目標繰り出し量と比較し、目標値を増減させて修正調整を行う。
(もっと読む)
1 - 7 / 7
[ Back to top ]