
Fターム[2B075GA01]の内容
収穫機本体(特定作物用) (1,318) | 特定作物の収穫 (58) | 収穫手段 (35)
Fターム[2B075GA01]に分類される特許
21 - 35 / 35
植物の葉の採葉機
【課題】植物の葉の採葉機を提供する。
【解決手段】所定長さの枝の先端部を把持し定速度で移動する枝移動手段と、該枝移動手段と水平方向で任意の角度にて取り付けられ、前記枝を把持して前記枝移動手段と実質的に等速に移動し、枝の先端部から元部へ葉をしごき落とす葉分離手段と、から構成される。そして枝移動手段は、枝を支持する支持部と、該支持部上を接触又は近接して走行する無端状部材とから構成され、葉分離手段は、上下一対のチェーン部材からなる無端機構と、該チェーン部材に一定間隔にて取り付けられた接触小片から構成される。
(もっと読む)
カット野菜収穫方法とカット野菜収穫機

【課題】 野菜の葉の部分を自動的にカットする機械がないため、葉のカットに多くの労力と手間がかかり生産性が悪くコスト高になっていた。
【解決手段】 本発明の野菜切断方法は、野菜が生育している栽培パネルの搬送中に野菜の根よりも上方部分をカットし、カットされた野菜を風で送って回収するようにした。野菜を切断刃側に押して栽培パネルの搬送方向最後列の野菜まで切り残しなくカットできるようにすることも、栽培パネルの外側に傾斜或いは倒れている野菜を内側に寄せてそれら野菜を切り残しなくカットできるようにした。本発明のカット野菜収穫機は搬送体と、切断刃と、カット野菜を回収体に送る回収風を噴出用の回収風噴出体と、野菜を切断刃側に押す追い風噴出用の追い風噴出体と、搬送中の栽培パネルの外側に傾斜或いは倒れている野菜を内側に寄せる側方ガイドを設けた。切断刃の高さを調節できるようにした。
(もっと読む)
果実収穫ロボット
【課題】
狭い栽培棚間でも確実に果実を検出し、果実を傷つけることがなく、且つ簡潔な構成の果実収穫ロボットを提供することを課題とする。
【解決手段】
果実の有無及び果実までの距離を検出する検出装置37と、収穫する果実が収穫可能かどうかを識別する識別装置49と、該識別装置49の識別結果にもとづいて果実を収穫するマニピュレータ45とからなる収穫装置Bを前後左右上下方向に移動自在に設けると共に、該収穫装置Bにて収穫した果実を回収する回収部Cを設け、マニピュレータ45で収穫した果実を把持したまま収穫装置Bを回収部Cへ移動させ、マニピュレータ45で把持している果実の把持を解除して回収部Cに投入させる制御装置53を設ける構成とする。
(もっと読む)
結球野菜収穫機
【課題】本発明は、収穫後の洗浄作業などの余計な手間を要せず、所望の位置で確実に切断して収穫すると共に収穫作業の効率化を図ることができ得る簡易な構造の結球野菜収穫機を提供することを目的とする。
【解決手段】本発明の結球野菜収穫機は、走行車体に、畝に植生する結球野菜の結球部を挟扼する案内装置と、案内装置により挟扼された結球野菜を切断して結球野菜の外葉と結球部とを分離する回転刈刃を有する切断装置とを設け、前記案内装置を前記走行車体の前方で前記畝に沿って前低後高状に配置した左右の案内ロッドにより構成し、この左右の案内ロッドにより畝の頂面の直上で両案内ロッドの間が狭くなる狭隘部を形成すると共に前記回転刈刃を前記狭隘部の後下方で畝の直上に配置したことを特徴とする。
(もっと読む)
収穫機
【課題】バイオマス原料として利用されるひまわり等の花托部の収穫作業の能率を向上させようとするものである。
【解決手段】刈取装置(4)には、植立状態の植物を切断する第一切断装置(8)と、該第一切断装置(8)によって切断した植物を所定位置へ横移送する横移送装置(9)と、該横移送装置(9)によって移送された植物を引継いで脱粒装置(5)へ供給する搬送装置(10)とを設ける。また、横移送装置(9)の前側に幅狭に形成した複数の前移送装置(11)を左右方向に互いに間隔を設けて配置する。そして、横移送装置(9)における駆動回転式の横移送筒(9b)の外周部に多数の移送歯(9c)を配置すると共に、該横移送装置(9)の底板(9a)には、横移送筒(9b)の回転によって移送される植物を細断することのできる切刃(9d)を移送歯(9c)の通過位置に接近して設ける。
(もっと読む)
茎葉収穫機
【課題】
茎葉を収穫する姿勢を安定させ、効率よく収穫作業を行うことができる茎葉収穫機を提供することを課題とする。
【解決手段】
第1に、機枠6に走行装置1L,1Rと左右引起こし装置42と収穫した茎葉を機体後方に搬送する搬送装置Fとを備えた茎葉収穫機において、該左右引起こし装置42を機枠6の左右前側に各々独立して上下方向に回動自在に設けた左右支持部材26の前部に設け、該左右支持部材26を上動方向に付勢する左右バネ部材30を左右支持部材26と機体6側との間に設けると共に、左右引起こし装置42の下部に左右接地部材36を設け構成する。
第2に、機枠6側に基部を装着した左右リンク装置28を左右アクチュエータ31によって上下動自在に設け、該左右リンク装置28と左右支持部材26とを左右各々遊動機能を有する左右連結部材66で連結して構成する。
(もっと読む)
茎葉収穫機
【課題】
圃場に植生する茎葉を寄せて刈り取り、茎葉を傷つけることなく選別搬送して収穫できる茎葉収穫機を提供することを課題とする。
【解決手段】
機体下部に機体を前後進させる走行装置Aを設け、機体の左右一側部に機体を操作する操縦部Bを設け、機体の左右他側部に茎葉を収容した収容体23を載置する載置部Cを設け、機体前部に茎葉を寄せる茎葉寄せ装置Dを設け、該茎葉寄せ装置Dの後部に茎葉を刈り取る刈取装置Eを設け、該刈取装置Eの後部に茎葉を後方に搬送する搬送装置Fを設け、該搬送装置Fの後部に茎葉を収容する収容部Gを設けて構成する。
(もっと読む)
収穫装置
【課題】安全でかつ軽量で、収穫物の根切りを容易に作業することができ、根切り位置を容易に一定にすることができる根切り機を提供することである。
【解決手段】2つの車輪23を有するフレーム20に保持部10が固設され、フレーム20の側面部に根切り刃30が設けられる。根切り刃30は、刃先31が水平面においてフレーム20の側面部からフレーム20の進行方向と垂直な方向に延在するととともに、鉛直面においてフレーム20の進行方向に対して下方向に湾曲したR形状を有するものである。
(もっと読む)
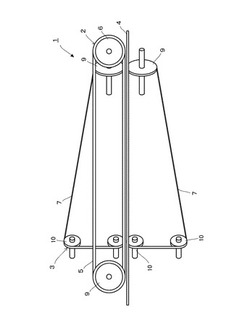
柱状物の昇降装置
【課題】径が変化する木又は径の異なる複数の木にも対応でき、作業者が自ら高所での作業を行う必要がなく、しかも装置構成が簡単で持ち運びも便利な柱状物の昇降装置を提供する。
【解決手段】柱状物11の同一高さ位置で、柱状物11の外表面12周方向に間隔を開けて配置され、柱状物11の外表面12を上下方向に走行可能な2台以上の駆動車を含む複数の走行台車13〜16と、隣り合う走行台車13〜16を連結し、伸縮力によって各走行台車13〜16を柱状物11の外表面12に押し付ける弾性部材17とを有する。
(もっと読む)
農作物の栽培、収穫、調整方法
【課題】 ラッキョウ等の鱗茎菜の収穫・調整作業を正確且つ安全に行うことができると共に、大幅な省力化を可能とする方法を提供する。
【解決手段】
土壌中にネット20を敷設し、その上に種ラッキョウを植え付けて生育させる。このとき、鱗茎30から伸長した根31はネット20の目を通過して地中に広がるが、分球・生育した鱗茎部30はネット20の目を通過できないため、ネット20の下面にはラッキョウの根部31が、上面には鱗茎部30が位置する。生育したラッキョウは自身の根31によってネット20に固定されているため、ネット20を土壌から引き上げることで容易に収穫することができる。収穫されたラッキョウを、ネット20に固定された状態のままで調整装置に導入し、ネット面から所定の距離離れた位置に設けられた回転刃47a、42aによって鱗茎部30から茎葉部32・根部31を切除する。
(もっと読む)
植物の切断方法およびそれに使用する切断装置
【課題】キャベツ、白菜、レタスなどの結球部を形成する結球植物の切断したい位置である外葉と結球部との間で確実に切断し、切断時に結球植物を傷めない切断方法および切断装置を提供する。
【解決手段】所定長さの線材11と、線材11を植物に対して相対的に移動させる支柱12と、線材11と支柱12との間に配置したガイド16、17を有する。ガイド16、17の外径は線材11の線径よりも大きく構成され、ガイド16、17を外葉22と結球部21との間に挿入して線材11を切断位置に配設し、その後、線材11を植物20の茎に食い込む方向に移動させる。
(もっと読む)
枝豆収穫機
【課題】植えてある枝豆の茎から枝豆をもぎ取る枝豆収穫機を提供する。
【解決手段】植えてある植付枝豆1の茎2から枝豆3をもぎ取る枝豆もぎ取り装置4を、植付枝豆1の植付地面に対して走行移動する機体5に設けた枝豆収穫機において、前記植付枝豆1の茎2を挟んで対向し得るように回転部6を対向配設し、この回転部6を回転させた前記機体5を走行移動させて前記植付枝豆1を前記回転部6間に導入することで、前記回転部6のもぎ取り部7によって枝豆3を茎2からもぎ取るように前記枝豆もぎ取り装置4を構成し、この枝豆もぎ取り装置4の前記対向回転部6間の植付枝豆導入口側に、少なくともこの対向回転部6間に導入される若しくは導入された植付枝豆1をこの導入方向に引き寄せる引き寄せ力を付与する引き寄せ回転部8から成る引き寄せ導入装置9を設けたものである。
(もっと読む)
自走収穫装置およびその改造キット
【課題】 ほうれん草等の収穫作業に好適な自走収穫装置を提供する。
【解決手段】 管理機(11)および、それに装着可能な換装器具(20)で構成され、畝の作付け幅(W)を超えるように軌間(G)を定め、畝の両側に形成された通路(5)を管理機(11)の駆動輪(12),(12)がトレース可能な長さの車軸(13)と、通路(5),(5)の片方に沿った辺(X)およびこの辺(X)に直角で前記車軸(13)に平行な辺(Y)そして前記各辺(X),(Y)の端部を結び前記作付け幅(W)を含む斜辺(Z)により形成される直角三角形を含むフレームと、このフレームの一部により換装器具(20)を管理機(11)に固定する連結部(17),(18)と、斜辺(Z)に平行な刃渡りを有し畝(4)の地表(A)直下の土中に潜らせて前に切り込み可能な刃物(7)と、を備えた葉菜類(1)の自走収穫装置(10)。
(もっと読む)
葉菜または豆果の収穫方法および収穫装置
第1コンベア(30)と刈取ステーション(40)との間の隙間(82A)にトレー(10)を支持する固定板または格子(82)が配置されている。刈取ステーションにおける刈取装置は板または格子(82)の上方で高さを調整できる。装置を使用した葉菜および豆果の収穫方法も開示されている。  (もっと読む)
(もっと読む)
軟弱野菜収穫機
【課題】簡単な構造の軟弱野菜収穫機の提供。
【解決手段】機体前方の切断刃6で切断した複数株のほうれん草などの軟弱野菜をベルトコンベア8に載せて後方に送る収穫機1に関する。ベルトコンベア8の左右両側にはガイドカバー9により垂直ガイド壁を形成して、切断刃6からベルトコンベア上に受け渡された複数株の軟弱野菜を中央に寄せ集める。寄せ集められた複数株の軟弱野菜は隣同士の葉と葉とが絡み合った状態になり、初期の立ち姿を保持したまま後方に搬送される。
(もっと読む)
21 - 35 / 35
[ Back to top ]