
Fターム[2B304LB16]の内容
農作業機用昇降装置 (9,026) | 作業機、作業部の配置、連結 (1,078) | 作業機、作業部の連結 (476) | リンク式ヒッチ (458) | 平行リンク式 (166)
Fターム[2B304LB16]に分類される特許
141 - 160 / 166
農用作業機
【課題】 植付装置の昇降操作と、整地装置の昇降操作と、整地装置に対する動力伝達の入切操作とを連動させて、動力伝達の入切を同じタイミングで繰り返して確実に実行可能とすることにより、整地装置の操作に伴う作業者の負担を軽減する。
【解決手段】 1個の操作レバー85を操作して整地装置51の昇降と整地装置51に対する動力伝達の入/切とが同時に制御される。操作レバー85によって動力伝達が入に設定されていても、植付装置31が上昇されると、連動機構120が整地装置51に対する動力伝達を強制的に切に設定する。
(もっと読む)
水田作業機のローリング制御装置

【課題】 走行機体に連結された水田作業装置を、優れた応答性および高い精度でローリング制御する。
【解決手段】 水田作業装置3に左右方向の傾斜角度θを検知する重力式の角度センサ31と、左右方向の傾斜角速度ωを検知する角速度センサ32とを装備し、角度センサ31および角速度センサ32からの検出情報に基づいて得られた検出傾斜角度θと、角速度センサ32で検出された角速度ωと、角速度センサ32で検出された角速度ωを微分して得られた角加速度dω/dtとを加算した演算値Eに基づいてアクチュエータ23の作動速度を決定する制御手段を備えてある。
(もっと読む)
歩行式移動作業車両の傾斜制御装置
【課題】機体の左右バランスを大きく崩すことなく、軟弱な土壌や凹凸のある圃場面を走行可能な歩行式動力散布機を提供する。
【解決手段】歩行式動力散布機11の操向操作具である左右両側に把持部を有する操縦ハンドル23L,23Rを機体フレーム13に上下動(ローリング)可能に取り付け、且つ機体フレーム13に対して左右一対の走行装置12L,12Rを独立的若しくは背反的に上下動可能に支持すると共に、前記操縦ハンドル23L,23Rの上下動操作に連動して両走行装置12L,12Rの上下動させる連係手段81を設けた。
(もっと読む)
除草機
【課題】 機体全体の大型化及びコストアップを招くことなく、株元部分の除草位置及び除草範囲を簡単かつ容易に調節して常に適確良好な除草効果を発揮できるようにする。
【解決手段】 乗用走行機体4に昇降自在に連結された前後方向に長いフレーム22に接地ソリ23と、植付け条における株間に左右側方から作用するタイン24を前後複数に並設した株間除草手段10Aと、条間除草手段10Bとを取り付けてなる除草機であって、複数のタイン24を、左右方向に位置変更固定自在で、かつ、フレーム22に対する前後方向の傾斜角度変更固定自在に構成している。
(もっと読む)
作業機
【課題】 苗植付け装置に左右傾斜に起因する浮き苗を発生しにくくしながら苗植付け装置のローリング制御を行うことができるようにする。
【解決手段】 苗植付け装置の左右傾斜角を検出する傾斜角センサ51、及び、苗植付け装置の左右傾斜の角速度を検出する角速度センサ52による検出情報を基に、制御手段50がローリング駆動機構のローリングモータ41を操作し、ローリング駆動機構が苗植付け装置を設定姿勢にローリング操作する。傾斜角センサ51又は角速度センサ52による検出値が設定不感帯から外れた場合、制御手段50が昇降シリンダ5を操作し、昇降シリンダ5が苗植付け装置を下降操作する。
(もっと読む)
乗用トラクタの走行速度制御装置
【課題】乗用トラクタや田植機等といった農作業機の車体後部に作業機を連結して農作業を行う場合、圃場端部で旋回する際に該作業機の引き摺りを防止するために、該作業機を所定高さの非作業位置まで上昇させている。例えば乗用トラクタで耕耘作業を行うときに、乗用トラクタが旋回する部分は枕地と称されて未耕耘部分が残り、最終段階で乗用トラクタが枕地を往復して未耕耘部分をなくしている。解決しようとする課題は農作業機において、シンプルな制御装置で枕地耕耘処理の簡略化を可能にすることである。
【解決手段】エンジン5と伝動装置として無段変速装置22と前後進切換装置と作業機の昇降装置とを備えた乗用トラクタ20において、該作業機の昇降装置が最上昇したこと又は該前後進の切換装置が前進から後進に切り替わったことにより、予め設定できる所定速度に減速する。
(もっと読む)
粉粒体吐出機
【課題】繰出伝動軸60の伝動系の負荷の増大と脈動を防ぎ、更にコストがアップせず、繰り出し精度の良い粉粒体吐出機11の提供である。また走行性能が良い粉粒体吐出機11の提供である
【解決手段】車体2の後部に粉粒体繰出部10を配置した粉粒体吐出機11において、前記車体2の後輪4,4の内側に後輪伝動ケース30,30と、該後輪伝動ケース30,30を介して後輪がローリングするためのローリング軸2baを設けており、前記後輪伝動ケース30,30と共に後輪4,4が前記ローリング軸2ba回りに左右にローリングし、前記後輪伝動ケース30からその上方の前記粉粒体繰出部10へ動力を伝動するべく、後輪伝動ケース30の上側へ突出する繰出伝動軸60を、後輪4,4が左右にローリングする接線方向に向くように、左右方向に傾けて配置した粉粒体吐出機11である。
(もっと読む)
畦塗り機
【課題】効率よく作業ができる畦塗り機を提供する。
【解決手段】畦塗り機1は、土を耕耘して盛り上げる盛土体21と、土を締め固めて畦を形成する畦形成体31とを備える。盛土体21および畦形成体31は、これら盛土体21および畦形成体31に対して共通する1つの基準面に沿って移動することにより、トラクタの前進走行に基づいて作業をする右突出作業状態およびトラクタの前進走行に基づいて作業をする左突出作業状態に切換え可能となっている。
(もっと読む)
田植機
【課題】 苗載せ台の横移動及び苗量変化にかかわらず苗植付け装置が設定姿勢に精度よく維持されるようにすることができ、かつ安価に得ることができる田植機を提供する。
【解決手段】 苗植付け装置の横移動位置を検出する位置センサ52、左右傾斜を検出する傾斜センサ51、苗植付け装置をローリング操作するローリングモータ41を設けてある。制御電源が入り操作されると、制御手段50は、苗載せ台が設定横移動距離を横移動するまでの間、傾斜センサ51の検出情報を基に、苗植付け装置が設定姿勢になるようにモータ41を操作し、モータ41の制御目標ストロークを設定するための苗載せ台データを計測してデータ記憶手段70に記憶させる。苗載せ台が設定横移動距離を横移動した後、制御手段50は、位置センサ52の検出情報とデータ記憶手段70の記憶苗載せ台データとを基に、モータ41の制御目標ストロークを設定し、苗植付け装置が設定姿勢になるようにモータ41を操作する。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
作業機の傾斜制御装置
【課題】 角度センサからの検出信号と角速度センサからの検出信号に基づい姿勢制御用の駆動機構を作動制御して、作業装置を所定の傾斜姿勢に安定維持させるよう構成した作業機の傾斜制御装置において、エンジン始動直後における角速度センサの零点値設定を好適に行うことができるようにする。
【解決手段】
走行機体に搭載されたエンジンの起動時に、角速度センサからの検出信号を所定複数回に亘って取得し、取得した検出信号の全ての値が設定範囲内にあればこれら複数回の検出信号を平均処理して角速度センサの零点値に設定し、取得する複数回の検出信号に前記設定範囲から外れた値のものが含まれていると、予め記憶されている暫定零点値を角速度センサの零点値に設定する零点設定手段を備えてある。
(もっと読む)
作業機の傾斜制御装置
【課題】 角度センサ27からの検出情報に基づいて姿勢制御用の駆動機構を作動制御して作業装置を所定の傾斜姿勢に安定維持させるよう構成した作業機の傾斜制御装置において、安価に入手できる角度センサを用いた簡単な角度検出手段を用いて安定した傾斜制御を比較的精度よく行えるようにする。
【解決手段】 角度センサ27からの検出情報の低周波成分に基づいて姿勢制御用の駆動機構を起動させ、角度センサ27からの検出情報の高周波成分に基づいて駆動機構の作動を停止させる。
(もっと読む)
水田作業機のローリング制御装置
【課題】 走行機体に連結された水田作業装置を、優れた応答性および高い精度でローリング制御する。
【解決手段】 水田作業装置に左右方向の傾斜角度を検知する角度センサ27と、左右方向の傾斜角速度を検知する角速度センサ28とを装備し、角度センサ27からの検出信号のうちの低周波成分と、角速度センサ28からの検出信号を積分して得られた傾斜角度のうちの高周波成分とを加算して水田作業装置における左右方向の検出傾斜角度θとする傾斜角度演算手段を備え、算出された検出傾斜角θを目標傾斜角度θ0に近づけるようローリング用の駆動機構を作動制御する制御手段を備えてある。
(もっと読む)
水田作業機の制御装置
【課題】作業装置を下降する際に、圃場面との干渉を回避しつつ、作業高さ位置にできる限り近接した位置まで速やかに下降調節することができる簡易な構成の水田作業機の制御装置を提供する。
【解決手段】水田作業機の制御装置は、昇降操作手段19u,19dの操作に応じて所定の作業位置から非作業位置までの高さ範囲で作業装置6を昇降制御する制御部41を備え、この制御部41は、同作業装置6と一体的に昇降する硬軟センサ34によりその作業高さ位置を含む上下の検出限度の範囲内で圃場面と干渉することによりその硬度と対応して検出される硬度信号に応じて作業装置6の昇降感度を制御するように構成され、上記制御部41は、上記作業装置6の下降制御の際に、硬軟センサ34が圃場面を検出したときに作業装置6の下降動作を中途停止してその検出限度位置に保持するものである。
(もっと読む)
表示装置及び作業機
【課題】 表示言語の設定ミスを防止して適切な言語にて情報を表示させることができる表示装置及び作業機の提供。
【解決手段】 表示装置に接続されるハーネスが備えるコネクタの特定のピンの機能を検出し(ステップS121)、検出結果に基づいて使用する言語を選択する(ステップS122)。そして、選択した言語に応じて言語フラグを立て、表示用の言語を設定する(ステップS123)。
(もっと読む)
傾斜角度計測装置
【課題】 傾斜角度検出手段の出力が飽和することに起因して、その飽和状態からの復帰後も演算手段の演算による傾斜角度が異常値を示すことを回避する。
【解決手段】 移動体Aの傾斜角度を検出する傾斜角度検出手段45の出力と、その傾斜方向での移動体Aの角速度を検出する角速度検出手段46の出力とに基づいて、移動体Aの傾斜角度を演算する演算手段48を備えた傾斜角度計測装置を、予め設定した閾値に基づいて傾斜角度検出手段45が飽和状態か否かを判別し、傾斜角度検出手段45が飽和状態でない場合には、演算手段48が、角速度検出手段46の出力に対する演算処理を行って、角速度検出手段46の出力に基づく演算値を更新し、傾斜角度検出手段45が飽和状態である場合には、演算手段48が、角速度検出手段46の出力に対する演算処理を停止して、角速度検出手段46の出力に基づく演算値を固定するように構成した。
(もっと読む)
農用作業車の制御装置
【課題】農作業車の畔際での旋回走行を円滑にする。
【解決手段】走行機体(1)の旋回動作を検出する旋回検出手段(19)により検出される旋回開始のタイミングと対応して農作業装置(7)の上昇及び駆動停止並びに走行距離計(26)の計測開始を指令し、その走行距離から判定される旋回走行の終了による次行程の作業開始位置への到達によって農作業装置(7)の下降及び駆動開始を指令する自動旋回制御を行なう制御部(16)を備える農作業車の昇降制御装置において、自動旋回制御中に走行機体(1)が後進走行すると、農作業装置(7)を所定位置まで下降させて停止する。
オペレータの後方視界を良くし、機体を畔際ぎりぎりまで後進させることができ、枕地植付作業等を円滑に行なうことができる。
(もっと読む)
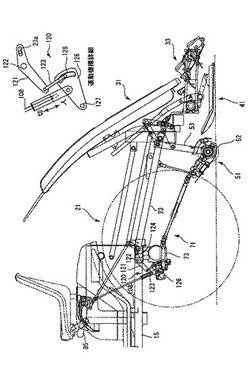
苗移植機
【課題】整地装置付き苗植付部のローリング精度の向上を図る。
【解決手段】走行車体2に設けた昇降リンク機構13により昇降自在の走行部側ベース14に整地ローリング軸16を介して整地ベース17を左右ローリング自在に設ける。整地ベース17に整地装置22を設けると共に、走行部側ベース14と整地ベース17との間を左右のローリングスプリング43,43で連結して整地ベース17を従動的に左右にローリング制御可能に構成する。整地ベース17には植付ローリング軸18により苗植付部19を左右ローリング自在に設けて、苗植付部19をローリングアクチュエータ21により整地ベース17のローリング制御状態に沿うように左右ローリング制御可能に構成する。
(もっと読む)
乗用型作業機
【課題】前輪に対する操向操作を行うだけで、旋回内側の後輪を制動させて旋回を操作性良く行える乗用型田植機があるが、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入切操作や上下動操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性において課題があった。
【解決手段】操向用の左右前輪6・6とエンジン12からの動力を変速する伝動装置からの出力で駆動される左右後輪7・7を備え、左右後輪7・7への駆動を各別に入り切りする左右サイドクラッチI・Iを設けた乗用型作業機おいて、左右前輪6・6を所定の速度以上の速さ又は所定以内の均一な操向速度で所定角度以上に操向操作すると、旋回内側となる後輪7のサイドクラッチIを切り、旋回内側となる後輪7の回転数の検出に基づいて走行距離を算出して、旋回時の諸作業用の作動を自動的に行わせる制御装置170を設けた乗用型作業機。
(もっと読む)
薬剤散布作業車
【課題】十字レバーなどのレバー66L,Rを用いながら車体の左右にある散布ブーム44,44の操作を同時に行うことができ、また伸縮動作をする場合でも片手で楽に散布ブーム44,44を操作できる操作性、作業性が向上した薬液散布作業車を提供すること。
【解決手段】薬液散布用の車体左右の散布ブーム44,44をそれぞれ上下方向に動かすためにレバー66L,66Rを上下方向に操作し、左右のブーム44,44をそれぞれ左右方向に伸縮操作するためにレバー66L,Rをそれぞれ左右方向に操作させる第一モードと左右の散布ブーム44,44の両方を同時に作動させる第二モードを切替ボタン65で切替可能に構成した薬剤散布作業車である。
(もっと読む)
141 - 160 / 166
[ Back to top ]