
Fターム[2B304LB16]の内容
農作業機用昇降装置 (9,026) | 作業機、作業部の配置、連結 (1,078) | 作業機、作業部の連結 (476) | リンク式ヒッチ (458) | 平行リンク式 (166)
Fターム[2B304LB16]に分類される特許
21 - 40 / 166
作業車両
【課題】作業機の昇降制御を安定させた作業車両を提供する。
【解決手段】田植機は、植付部と、制御部と、を備える。制御部は、植付部の加速度(具体的にはフロート角加速度)を取得する。そして制御部は、前記加速度に二階微分ゲインKd2を乗じたものに基づいて、植付部の昇降制御を行う。このように植付部の加速度に基づいて昇降制御を行うことにより、植付部の上下速度の変動が大きい場合の振動的な応答を抑制できる。また、前記加速度は、圃場表面からの反力によって生じるため、当該加速度に基づいて制御を行うことにより、圃場の硬さに応じた制御動作を実現することができる。
(もっと読む)
田植機

【課題】旋回時自動昇降制御において苗の空植えを防止する。
【解決手段】田植機1は、上下に昇降可能な植付部3と、植付部3への駆動力を断接制御する植付クラッチ50と、車体旋回時に植付部3の昇降及び植付クラッチ50を制御する旋回時自動昇降制御を行う制御部と、を備える。旋回時自動昇降制御において、制御部は、旋回中又は旋回終了後の所定のタイミングで植付部3を自動的に下降させる。また制御部は、旋回終了後に、旋回開始前の植付中断位置に対応する植付再開位置まで車体が到達したときに植付クラッチ50を接続して植付を再開する。そして当該制御部は、植付部3を下降させるタイミングを、車体の走行速度に応じて変更する。
(もっと読む)
田植機
【課題】田植機において、ピッチング角等に基づく補正を適切に行い、良好な昇降制御性能を得ることができる構成を提供する。
【解決手段】制御部は、フロートの揺動角の検出値を、ピッチング角に基づいて補正して(ステップS106)、植付部を昇降制御するように構成されている。そして制御部は、ピッチング角の変化速度又は加速度が大きい場合には、前記補正を行わない。即ち、車体が急激なピッチング挙動を示すときには、ピッチング角による補正の影響を小さくすることにより、意図しない昇降制御が行われてしまうことを防止し、植付部の不必要な高さ変動を抑えることができる。
(もっと読む)
田植機
【課題】苗継ぎ作業時に、エンジンの回転数をアイドル回転数よりも低下させた場合でも、植付部を設定角度に維持することができる田植機を提供する。
【解決手段】エンジン14が搭載された走行部10の後方に植付部40を左右傾斜可能に装着した田植機1において、制御装置100は、苗継ぎ位置検出スイッチ23aのON信号を検出すると、エンジン14の回転数がアイドル回転数より低い設定回転数となるように第一アクチュエータ71を制御して、かつ、角速度センサ61の検出値Bを静止状態の検出値Bで置き換えて前記第二アクチュエータ72を制御する。
(もっと読む)
移動農機
【課題】移動農機である乗用田植機による圃場での植付作業において、乗用田植機で畔際を後進する際に、乗用田植機の作業機である植付作業機と畔とが接触することを防止する移動農機を提供する。
【解決手段】乗用田植機1の後進操作の検出時に、後進操作前に操舵角センサより検出されたステアリングハンドルの操舵角が旋回領域に位置する場合には(S601)、植付作業機の高さ位置が設定されている場合であっても、植付作業機を第1位置(H1)にまで上昇させる(S608)。
(もっと読む)
作業車両
【課題】昇降可能に装架した苗植付部や播種機等の作業装置の上昇操作を忘れた場合においても、機体後進による作溝機の詰まりや破損等の事態を招くことなく、圃場作業を円滑に進めることができる作業車両を提供する。
【解決手段】苗移植機は、作業装置4を昇降自在に支持するリンク機構およびその昇降位置検知部材と、作業装置4に設けた作溝器に粒状体を供給する粒状体供給装置5と、前後進の車速選択とリンク機構の支持高さ調節とを行う走行操作レバー73およびその走行操作検知部材73Sと、後輪回転検知部材と、報知部材71と、作業装置4に配置された報知停止スイッチ72とを走行車体に備えて構成され、リンク機構が所定高さ以下、走行操作レバー73が後進車速位置、後輪11が回転の3条件全てに該当した時に、報知停止スイッチ72の操作まで報知部材71を作動する制御を構成したものである。
(もっと読む)
移植機
【課題】機体の前上がり傾斜が所定の傾斜角以上になる畦越え作業や、機体の後部に昇降自在に連結した植付作業機が圃場から脱出するぎりぎりの状態(植終い)までの植付作業を、オペレータが乗用型田植機に搭乗した状態で行えるようにする。
【解決手段】機体の前後方向の傾斜を検出するピッチングセンサ69が所定の傾斜角以上の機体の前上がり傾斜を検出している時、自動昇降制御中にはフロート23の基準姿勢を基準値かた前下がり状態に姿勢変更して自動昇降制御を継続し、自動昇降制御中でなければ植付を停止した状態でフロート23を接地させた植付作業機5の自動昇降制御を実行する制御手段61を設ける。
(もっと読む)
苗移植機
【課題】簡易な構成の旋回内側の伝動調節によってコストの低減とやメンテナンス性の向上を図り、突然のスリップ発生にも対応を可能として植付精度と作業能率を確保でき、かつ、旋回に必要な出力の確保が可能となる苗移植機を提供する。
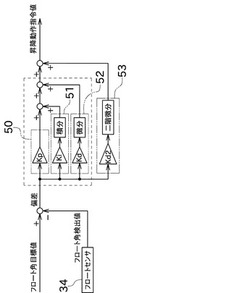
【解決手段】苗移植機は、全輪駆動の前後輪10,11を備えた走行車体2と、前輪10のデフロック機構51a付きデフ装置51と、後輪11のクラッチ機構18cと、旋回内側の後輪伝動を停止する制御ロッド部材52と、旋回時に昇降リンク機構3により上昇可能に支持した植付装置4とを備えて構成され、上記左右のクラッチ機構18c,18cの動作規制により左右の後輪動力を維持可能に設定するクラッチ設定機構53を設け、機体旋回時の前輪10のスリップによるデフロック機構51aの作動とともに植付装置4の上昇位置を低く抑える上昇規制機構Cを上記昇降リンク機構3に設けたものである。
(もっと読む)
乗用作業車
【課題】車体の走行に伴って車体周囲の作業対象物に対する作業を行う電動式作業デバイスの作業負荷の変動による不都合を低減する乗用作業車を提案する。
【解決手段】駆動車輪ユニットを走行駆動するための走行用電動機ユニットと、目標走行速度を設定するために運転者によって操作される速度設定操作ユニットと、車体の走行に伴って車体周囲の作業対象物に対する作業を行う作業デバイスを駆動するための作業用電動機と、作業用電動機の負荷を評価する作業負荷評価部によって評価された作業用電動機の負荷がしきい値より高い異常負荷である場合に目標走行速度より低い例外速度で走行用電動機ユニットを制御する例外速度制御を実行する例外速度制御部とを備えている。
(もっと読む)
薬液散布作業車両
【課題】旋回時又は旋回終了時に旋回外側のサイドブームを自動的に上昇又は下降させる制御を安全性を考慮して可能にした薬剤散布作業車両を提供すること。
【解決手段】GPS受信機81から得られる車速又は車輪12又は13の回転数から得られる車速により適切な薬液散布量となるように薬液タンク18からの薬液流量を流量制御モータ10により流量調節弁73の開度を調整する。このとき車輪12及び/又は13の操舵角の検知により自動的に旋回外側のサイドブーム44の上昇を行い、また前記車速が所定値以上になると旋回外側のサイドブーム44の自動上昇を行わない制御を行うことで、高速走行時にサイドブーム44の破損等の不具合を防止できる。
(もっと読む)
薬液散布作業車両
【課題】旋回時などに散布ブームを障害物に接触させないように、自動的に昇降制御が可能な薬剤散布作業車両を提供することである。
【解決手段】薬液タンク18からの薬液を圃場に散布するセンターブーム43と左右のサイドブーム44と左右のサイドブーム44の上下動をそれぞれ行うための上下シリンダ29と左右の車輪12及び/又は13)の切れ角を検出するタイヤ切れ角センサ46と車輪(12又は13)の回転数を検出する車速センサ6とタイヤ切れ角センサ46の旋回角度の検知により自動的に旋回外側のサイドブーム44の上下動を行い、該サイドブーム44の上げ速度は車速センサ6の検出値に基づき決める制御装置100を備えた薬液散布作業車両である。
(もっと読む)
作業車両
【課題】走行停止状態での待機時間を不要としつつ、後進走行中に従来より短時間に作業機を上昇できる作業車両を提供すること。
【解決手段】機体2の後部に苗移植装置7を装着するためのリンク機構8と、リンク機構を昇降させる昇降装置30と、機体2に設けられたエンジン6と、エンジン6の動力を変速して出力する変速装置5と、前進走行域、停止域、及び後進走行域の何れかの位置に切り替えることにより、変速装置の出力を変化させて走行速度を操作する走行操作レバー10と、走行操作レバー10が少なくとも後進走行域にある場合に苗移植装置7の上昇速度をエンジン回転数に基づいて制御する第1の制御を行う制御部200とを備え、第1の制御は、走行操作レバー10が、後進走行域の内、走行速度を最高に設定する最高速位置にあるときのエンジン回転数よりも、最高速位置より手前の位置にあるときのエンジン回転数の方を高くする制御である、作業車両。
(もっと読む)
作業機の昇降用油圧制御構造
【課題】構成の簡素化やコストの削減を図りながらスプール弁でのオイルのリークに起因した作業装置の下降を防止する。
【解決手段】昇降レバー14の操作に基づいて作業装置昇降用の油圧アクチュエータに対するオイルの流れを制御するスプール弁28と、油圧アクチュエータ2とスプール弁28とにわたる給排油路を開閉する油圧ロック弁とを備えた作業機の昇降用油圧制御構造において、油圧ロック弁を開閉弁で構成し、昇降レバー14の中立位置への操作に連動して開閉弁が給排油路を閉じ、昇降レバー14の中立位置から他の操作位置への操作に連動して開閉弁が給排油路を開くように、昇降レバー14と開閉弁とを連係部材56を介して機械的に連動可能に連係する。
(もっと読む)
作業機
【課題】 本発明は、種々の条件に対応して原動機の駆動回転数を適正に設定し、良好な走行性能及び作業性能を得ることを課題とする。
【解決手段】 走行推進体と原動機を備える走行車体を設け、走行車体の後側に昇降リンク装置を介して作業部を昇降可能に設け、昇降リンク装置を昇降させる昇降用アクチュエータを設け、原動機は走行推進体と昇降用アクチュエータを駆動する構成とし、該昇降用アクチュエータを駆動させて作業部を昇降操作する昇降操作具を設けた作業機において、昇降用アクチュエータが作業部を上昇作動させるとき、走行推進体が停止する状態であれば原動機の駆動回転数を上昇用の設定回転数まで上昇させる構成とした。
(もっと読む)
苗移植機
【課題】
苗載せ台を畦際側とは反対側へ移動させるときは、苗植機の走行を直ちに停止して、植付装置の植付操作を停止して、苗タンクを目的の方向へ大きく移動させて、苗移植機の旋回操作等を行わせる。又、この一旦横端へ移動させていた苗タンクを移動前の苗植付停止位置に戻してから、苗移植機の植付動作を行わせる必要があり、煩雑で正確な操作を要し、相当の時間と熟練を要する。
【解決手段】
植付装置3の伝動を停止した状態で苗タンク2を横端へ移動させるときの、摺動軸1の横送回転数をタンク送りセンサ6で検出し、この苗タンク2が横端に移動した後に前記苗植作用を開始するときは、前記タンク送りセンサ6が検出した横送回転数に基づいて摺動軸1を伝動回転して、前回苗植停止位置に苗タンク2を移動復帰する構成とする。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 苗移植作業装置を上昇させると共に走行距離算出手段にて走行距離の算出を開始し、該走行距離に応じて、先ず苗移植作業装置が下降する指令を出力し、その後、前記走行距離に応じて、線引きマーカ(195)が下降する指令を出力する制御装置(170)を設けた。
(もっと読む)
苗移植機
【課題】 本発明は、苗植付部の前後傾斜姿勢の制御は高精度で適正に行うことを課題とする。
【解決手段】 機体の走行の加減速を検出する走行加速度センサ(222)を設け、該走行加速度センサ(222)の検出に基づき、走行が加速されているときには苗植付部(4)を後上がり側へ前後傾斜させるべく前後傾斜用アクチュエータ(203)を作動させ、走行が減速されているときには苗植付部(4)を後下がり側へ前後傾斜させるべく前後傾斜用アクチュエータ(203)を作動させる制御装置を設けた苗移植機とした。
(もっと読む)
苗移植機
【課題】
後輪ローリング機構をシリンダで制御して、植付作業時や旋回作業時に機体の走行姿勢が作業に適した形態となる姿勢制御装置を設けた苗移植機を提供する。
【解決手段】
車体4の後部に中央回動軸42を中心に左右方向に回動するローリング機枠41を設け、ローリング機枠41の両端部に後輪3,3に回転駆動力を供給する後輪伝動ケース8,8を設け、ローリング機枠41を回動させる回動アクチュエータ9を設け、ハンドル1の操舵角度を検出する操舵角度検出部材7を設け、操舵角度検出部材7の検出した操舵角度から旋回内側を判別して回動アクチュエータ9を伸張または収縮させて車体4の旋回内側が低位となる側にローリング機枠41を回動させて傾斜姿勢にする構成とした。
(もっと読む)
乗用草刈機
【課題】地上高を一定に保持可能なモアデッキを備える乗用草刈機を提供する。
【解決手段】電動ローンモア10が、モアブレードと、モアブレードを上方および側方から覆うモアデッキ15と、モアデッキ15を懸架するとともに、進行方向に延設されるメインフレーム18と、メインフレーム18の前部に取り付けられ、走行面の起伏を検出する前輪11と、メインフレーム18の後端と連結したシャーシ27と、前輪の検出した走行面の起伏に応じて、メインフレーム18をシャーシ27に対して上下回動可能とする回動筒73とを備える。
(もっと読む)
作業車両
【課題】
土壌状態に合わせてエンジンの燃料噴射量を変更し、安定した土壌ではエンジンの回転数を減少させて燃費を向上させると共に、不安定な圃場ではエンジンの回転数を増大させて走行姿勢を安定させることのできる作業車両を提供する。
【解決手段】
左右の前輪6,6と左右の後輪7,7により圃場を走行する走行車体9にエンジン8を設け、走行車体9の後部に圃場に苗を植え付ける植付部5を設けた作業車両において、走行する土壌の状態を検出する土壌センサ10を設け、土壌センサ10が検出した土壌状態に合わせてエンジン8の燃料の噴射量を増減制御する構成とし、土壌センサ10の下部に、土壌センサ10の検出面11に間欠的に接触して付着物を除去する清掃部材12を設ける。
(もっと読む)
21 - 40 / 166
[ Back to top ]