
Fターム[2B304MA18]の内容
Fターム[2B304MA18]に分類される特許
1 - 20 / 51
作業車両のエンジン負荷制御装置
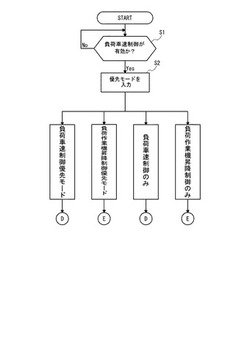
【課題】作業時に過負荷がかかった場合において、作業形態に応じて減速割合を変更可能とし、負荷制御のモードを切換可能な作業車両のエンジン負荷制御装置を提供する。
【解決手段】作業車両のエンジン負荷制御装置において、エンジン負荷制御装置50は、エンジン回転数を設定エンジン回転数Xsに保つように、エンジン21が過負荷となった時の負荷に応じて、車速を増減し、又は作業機30を昇降する構成とし、負荷車速制御と負荷作業機昇降制御との制御優先順位を設定する制御実行順序設定手段52を備える。
(もっと読む)
苗移植機

【課題】旋回後に苗の植付開始位置を適切な位置に揃えることができる苗移植機を提供すること。
【解決手段】苗移植機に、旋回時又は後進時には植付部52を自動的に上昇させ、前進時には植付部52を下降させる自動昇降機構Aと、植付部52の昇降動作及び苗植付動作の入切動作を行う植付昇降レバー33と、植付部52を上昇させた状態で後進させると後輪回転センサ182により検知される後進時の回転数が予め設定された基準回転数を上回ると自動昇降機構Aを作動させない制御構成とする制御装置200を設けたので、旋回後に植付部52を下降させて苗の植え付けを再開する際に、作業者は植付昇降レバー33を手動操作して植付部52を下降させることができるので、旋回後の苗の植付開始位置を適切な位置に揃えられ、苗の植付精度が従来より向上する。
(もっと読む)
トラクタの作業機掘り深さ自動制御装置
【課題】本発明では、地面を掘りながら進行する作業機を牽引したトラクタの作業機掘り深さ自動制御装置において、掘り深さを自動的に設定深さに維持するに、設定掘り深さを浅くしても外乱要素によって作業機が頻繁に昇降しないように制御することを課題とする。
【解決手段】トラクタ1で牽引する作業機2の対地掘り深さHを適宜の設定対地掘り深さH0に設定し、実際の対地掘り深さHが設定対地掘り深さH0の許容振れ幅Kからずれても一定の猶予時間Tだけそのずれを放置するよう制御し、設定対地掘り深さH0が浅い場合には深い場合よりも猶予時間Tを長くして、猶予時間Tの経過後に作業機2の位置を設定対地掘り深さH0に修正するように制御したことを特徴とするトラクタの作業機掘り深さ自動制御装置とした。
(もっと読む)
トラクタの作業機昇降制御装置
【課題】負荷率に応じて目標耕深を補正するにあたり、耕耘深さの急激な変化を回避すると共に、負荷率の回復を早めて耕深制御への復帰を促す。
【解決手段】耕深自動制御中に、エンジンENGの負荷率Lが所定値Iを超えたとき、目標耕深を補正してエンジンストールを防止する目標耕深補正手段を備えるトラクタの制御部20において、エンジンENGの負荷率Lが所定値Iを超えたとき、目標とする負荷率Hと現在の負荷率Lとの偏差に比例する比例制御量Tを算出すると共に、該比例制御量Tと前回の補正値Eとの差分Dを積分して目標耕深の補正値Eを決定するにあたり、負荷率Lの減少が見られないときは、それまでの積分値Kに差分Dを加算して補正値Eを決定し、負荷率Lの減少が見られるときは、それまでの積分値Kから差分Dを減算して補正値Eを決定する。
(もっと読む)
ブームスプレーヤ
【課題】センタブームの昇降移動やサイドブームの開閉移動時の操作が簡単であるとともに、誤操作によるサイドブーム等の破損を防止することができるブームスプレーヤを提供する。
【解決手段】走行装置と、センタブームと、サイドブームと、センタブームを昇降移動させる昇降移動手段と、サイドブームを開閉移動させる開閉移動手段と、サイドブーム4の閉位置および開位置に対応する閉位置および開位置の操作位置の間を回動操作されることにより、開閉移動手段を操作する開閉操作レバーとを備えたブームスプレーヤにおいて、開閉操作レバーが閉位置から所定開度の位置の範囲にあるときに昇降移動手段によりセンタブームを下降移動させた場合に、センタブームが所定位置になると昇降移動手段によるセンタブームの下降移動を停止させる下降移動停止手段80を備えている。
(もっと読む)
農作業機のリモコン装置
【課題】無線化されたリモコン装置の電源の消費電力を抑える。
【解決手段】リモコン装置100は、電源113と、これをオンオフする電源スイッチ101bと、このオンオフ状態を表示する電源ランプ101cと、農作業機の各種作動を制御する指令信号を送るための指令スイッチ101e等と、農作業機が所定作業可能状態にあるときに点灯する自動可ランプ101fと、各種作動を制御する指令信号データを記憶する記憶部111と、指令スイッチ101e等・電源スイッチ101bのいずれかがオンされると、指令信号データを記憶部から読み込んで通信部に送る制御部110を備え、制御部110は電源ランプ101cと自動可ランプ101fが点灯している時に、電源ランプ101cと自動可ランプ101fの電力消費を抑える省エネモード及び電源ランプ101cを消灯するオートパワーオフモードのいずれかに切り替えるランプモード切替部110bを備える。
(もっと読む)
作業車
【課題】作業装置の強制上昇時にはエンジンストールを招くことがなくエンジンの回転速度を低減する作業車を構成する。
【解決手段】作業装置の強制的な昇降を行う強制昇降制御手段63を備え、メモリ53に記憶された目標回転速度で作業を行っている際に、強制昇降制御手段63による強制上昇制御が行われた場合には、この強制上昇制御の開始から第1遅延時間が経過した時点で、エンジンの回転速度を人為的に設定される指示回転速度まで減ずる回転速度変更手段52を備え、選択スイッチ39の操作に基づいて回転速度変更手段52によるエンジンの回転速度の低減の許容と阻止とを選択する制御選択手段68を備えた。
(もっと読む)
トラクタ
【課題】本発明は、作業中に牽引負荷が所定限界値になるまでに牽引負荷の軽減制御を行うことで負荷の急激な増加を防ぎ、作業機やトラクタの破損を避ける技術を提供することが課題である。
【解決手段】耕耘或いは耕起作業等を行う作業機30を昇降可能に装着したトラクタ10において、牽引負荷を検出する牽引負荷検出手段21を設け、牽引負荷が所定の第一限界負荷値G1を超えると掘り下げを中止してその掘り深さを維持し、さらに第二限界負荷値G2を超えると作業機30を上昇させるようにしたことを特徴とするトラクタとした。また、第二限界負荷値G2を超えて作業機30を上昇させるにあたり、段階的に上昇させるように構成したことを特徴とするトラクタとする。また、トラクタ前記第二限界負荷値G2を超えて作業機30を上昇させるにあたり、牽引負荷の増加率が一定値以上の場合に段階的に上昇させるように構成したことを特徴とするトラクタとする。
(もっと読む)
トラクタ
【課題】ロータリ耕耘装置の強制昇降時にはエンジンストールを招くことなくエンジンの回転速度を変更し得るトラクタを構成する。
【解決手段】ロータリ耕耘装置の強制上昇制御時には、遅延時間設定ダイヤル41で設定されている第1遅延時間が経過した後に回転速度変更手段52がエンジンEの回転速度を減ずる減速制御を行い、この上昇状態において強制下降制御を行う際には、回転速度変更手段52がエンジンの回転速度を復帰させる復帰制御を行い、強制下降制御を開始するタイミングで復帰制御を開始し、この後、遅延時間設定ダイヤル41で第1遅延時間とともに設定される第2遅延時間が経過した後にロータリ耕耘装置の強制下降制御を開始する。
(もっと読む)
作業機
【課題】後進時に作業部の上昇操作によって機体を上昇させる作業機において、機体の動作状況をオペレータに直感的に把握させることができる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの後進操作が検出されている場合において、刈取部が最上端位置にある状態で、刈取部昇降スイッチの上昇側操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。そして、制御部は、この機体上昇制御とともに、ブザーによって機体の上昇を報知する。この状態で、主変速レバーが前進操作に切り替えられたことが検出されると、制御部は、機体の高さを所定位置まで下降させる機体下降制御を行うとともに、ブザーによって機体の下降を報知する。
(もっと読む)
作業車
【課題】操作性を維持しながら作業車の製作コストを下げ易くする。
【解決手段】手動モード入力スイッチ26が、機体フレームの左右のいずれかが上昇又は下降するように、左右のトラックフレームのうちのいずれかを上昇又は下降させるローリング用手動モードで作動させる制御指令を入力可能なローリング用手動モード入力スイッチ26aと、左右のトラックフレームを同時昇降させる昇降用手動モードで作動させる制御指令を入力可能な昇降用手動モード入力スイッチ26bとを各別に備え、ローリング用手動モード入力スイッチ26aが、横長でかつ機体前後方向の軸芯Ya周りに揺動操作自在なシーソースイッチで構成され、昇降用手動モード入力スイッチ26bが、縦長でかつ機体左右方向の軸芯Yb周りに揺動操作自在なシーソースイッチで構成されている。
(もっと読む)
農作業機用リモコン操作システム
【課題】部品の共通化が可能でかつシステムの変更を容易に行うことができるトラクタに装着する農作業機に備える出力機器を無線で操作するための農作業機用リモコン操作システムを提供することを目的とする。
【解決手段】トラクタに装着する農作業機に備える出力機器を無線で操作するための農作業機用リモコン操作システムであって、操作信号を無線送信可能な送信部10と、農作業機側に設置され送信部10からの無線信号を受信する受信部20と、農作業機側に設置され受信部20からの操作信号により出力機器を制御する制御部40と、受信部20と出力機器と制御部40とに接続される制御ハーネス30とを有し、受信部20と制御ハーネス30の間には、受信部20を脱着可能な接続部20aを具備する。
(もっと読む)
農作業機
【課題】方向修正制御が容易に行えるトラクタに装着される農作業機を提供することを目的とする。
【解決手段】トラクタに装着する支持フレーム11、12と、支持フレーム11、12に対して回動可能に支持され農作業を行う作業部13と、作業部13を支持フレーム11、12に対して回動させるアクチュエータ22と、制御部26と、方向修正スイッチ27a、27bを有する操作部27と、作業部13に設置されるセンサ31とを備え、制御部26は、センサ31からの情報から作業部13の方向が基準の方向に一定になるようにアクチュエータ22を制御し、方向修正スイッチ27a、27bの操作された場合、アクチュエータ22を駆動させ、当該操作が終了したときの作業部13の方向を新たな基準の方向とする。
(もっと読む)
作業機のロール角度検出構造
【課題】旋回走行中の変速により発生する加速度に起因して、ロール角度検出用のセンサの出力に基づいて演算した機体のロール角度が信頼性の低いものになるのを防止する。
【解決手段】機体のロール角度に応じて出力が変化するロール角度検出用のセンサ77と、このセンサ77の出力に基づいて機体のロール角度を演算するロール角度演算手段40Daを備え、ロール角度演算手段40Daが、旋回情報出力手段Aの出力に基づいて機体の旋回走行を検知している間は、センサ77に働く遠心力を演算する遠心力演算処理と、この遠心力演算処理で得た値に基づいてセンサ77の出力を補正する補正処理を行い、この補正処理後のセンサ77の出力に基づいて機体のロール角度を演算し、旋回情報出力手段Aと変速情報出力手段Bの出力に基づいて旋回走行中の変速を検知している間は、センサ77の出力を取り込まない取込中断処理を行うように構成してある。
(もっと読む)
対地作業部付設の作業車両
【課題】圃場における作業領域と作業能率を損なうことなく、機体旋回の終了間際のリスクを抑えて安定した作業走行の再開を可能とする対地作業部付設の作業車両を提供する。
【解決手段】作業車両は、作業位置に下降可能な作業部と、駆動輪の伝動を左右個別に切替え可能なサイドクラッチと、これら作業部およびサイドクラッチのそれぞれについて、直進時は作業位置および両側伝動、旋回時は非作業位置および旋回内側を非伝動に制御する制御部とを備えて構成され、この制御部は、操舵装置による旋回動作の開始により旋回走行距離を計測しつつ、次の直進動作の開始の時に、サイドクラッチを両側伝動に切替えるとともに、この時点以降で所定の旋回走行距離に至る間に、作業部を作業位置に切替えるものである。
(もっと読む)
作業機の油圧装置
【課題】ローリング制御弁の中立位置で、流量分配弁よりも上流側の圧油の全量を昇降制御弁側へ送り込み可能にし、圧油の有効利用と、昇降用シリンダの作動ショックを少なくする。
【解決手段】ローリング用シリンダ11が操作限界位置に達してリリーフ弁36が圧油を油タンクT側へ排出すると、ローリング制御弁39を中立位置39cに戻し、流量分配弁38を分配供給位置38bに切換え、リリーフ弁36の排出作動中に昇降制御弁42が操作されると、その昇降制御弁42による昇降用シリンダ9側への圧油供給量の増加率を、リリーフ弁36の排出作動中以外の時点で操作されるときの圧油供給量の増加率よりも緩やかにする制御手段14Aを備えた。
(もっと読む)
作業車
【課題】複数の制御モードの選択切り換えと、その切り換えた制御モードでの設定変更の可否と、設定変更した値を記憶するか否かの選択とを単一の選択操作具で行わせるようにして、構造の簡素化と操作性の向上とを図る。
【解決手段】制御装置100は、一つの制御モードが選択された状態において、選択操作具67が選択操作のために設定された時間よりも長い時間にわたって操作されると、制御手段101〜105の制御状態を設定操作具45により変更設定可能な変更設定モードを設定し、変更設定モードの設定後に選択操作具67が再度長い時間にわたって操作されると、制御手段101〜105の変更された状態を記憶手段106に記憶させるように構成した。
(もっと読む)
トラクタ
【課題】車体の前後にインプルメントを装着し、これら前後のインプルメントを使用した複合作業に容易に対応できるトラクタを提供する。
【解決手段】車体5の後部に、該車体5に装着されるインプルメントに装備された油圧アクチュエータ18を制御する補助コントロールバルブ19と、車体5後部に装着される後装インプルメントを昇降させる後装インプル用油圧シリンダ15を制御する昇降制御弁20とを設け、車体5の前部に、車体5前部に装着される前装インプルメントに装備された油圧モータ25を操作する第1コントロールバルブ31と、前装インプルメントに装備された油圧シリンダ26を操作する第2コントロールバルブ32とを有する前装インプル用バルブユニット28を設け、昇降制御弁20と、第1,2のコントロールバルブ31,32とを、車体5に装備された1つの油圧ポンプPから吐出される圧油によって別個に作動させる。
(もっと読む)
作業車両搭載用制御装置
【課題】作業車両1に各制御手段210,213,281,282を組み付けた後に、個別の制御プログラムをそれぞれ対象となる制御手段210,213,281,282に書き込む場合において、適式な制御プログラムを各制御手段210,213,281,282に伝送できるようにする。
【解決手段】通信バス280に接続された外部端末290にて、識別子毎のプログラムを、識別子に対応した制御手段210,213,281,282にインストールするように構成されており、外部端末280と各制御プログラムとに保安用の固有コードを有する。インストール前に予め、外部端末280の固有コードと各制御プログラムの固有コードとを照合し、合致した制御プログラムを、これに対応する制御手段210,213,281,282にインストールするように構成する。
(もっと読む)
作業車両搭載用制御装置
【課題】制御手段210,213,281,282の組み付け工程において、作業車両1の各搭載箇所に対して、誤ったプログラム書き込み済制御手段を取り付けてしまう人的ミスを回避できるようにする。
【解決手段】各制御手段210,213,281,282を作業車両1に組み付けた状態において、各制御手段210,213,281,282にその固有情報に応じた識別子を設定する。通信バス280に接続された外部端末290から識別子毎の制御プログラムを読み出して、識別子の一致する制御手段210,213,281,282にインストールするように構成する。
(もっと読む)
1 - 20 / 51
[ Back to top ]