
Fターム[2B304QC13]の内容
Fターム[2B304QC13]の下位に属するFターム
車両、リフトアーム (31)
リフトロッド、リフトシリンダ (7)
連結機構、リンク機構 (11)
作業機、作業部 (28)
Fターム[2B304QC13]に分類される特許
1 - 17 / 17
作業車両
【課題】作業機の昇降制御を安定させた作業車両を提供する。
【解決手段】田植機は、植付部と、制御部と、を備える。制御部は、植付部の加速度(具体的にはフロート角加速度)を取得する。そして制御部は、前記加速度に二階微分ゲインKd2を乗じたものに基づいて、植付部の昇降制御を行う。このように植付部の加速度に基づいて昇降制御を行うことにより、植付部の上下速度の変動が大きい場合の振動的な応答を抑制できる。また、前記加速度は、圃場表面からの反力によって生じるため、当該加速度に基づいて制御を行うことにより、圃場の硬さに応じた制御動作を実現することができる。
(もっと読む)
苗移植機

【課題】
苗載せ台を畦際側とは反対側へ移動させるときは、苗植機の走行を直ちに停止して、植付装置の植付操作を停止して、苗タンクを目的の方向へ大きく移動させて、苗移植機の旋回操作等を行わせる。又、この一旦横端へ移動させていた苗タンクを移動前の苗植付停止位置に戻してから、苗移植機の植付動作を行わせる必要があり、煩雑で正確な操作を要し、相当の時間と熟練を要する。
【解決手段】
植付装置3の伝動を停止した状態で苗タンク2を横端へ移動させるときの、摺動軸1の横送回転数をタンク送りセンサ6で検出し、この苗タンク2が横端に移動した後に前記苗植作用を開始するときは、前記タンク送りセンサ6が検出した横送回転数に基づいて摺動軸1を伝動回転して、前回苗植停止位置に苗タンク2を移動復帰する構成とする。
(もっと読む)
作業車両
【課題】走行機体の左右傾斜に拘わらず作業機を圃場面に対して予め定められた左右傾斜姿勢で保持させる左右傾斜制御を行う作業車両であって、低コストで、精度の高い左右傾斜制御を実行することが可能な作業車両を提供する。
【解決手段】前輪1側のフロントアクスルケース23の左右傾斜によって走行機体3が左右傾斜することを抑制するために、走行機体3をフロントアクスルケース23に左右傾斜可能に支持し、フロントアクスルケース23の左右傾斜角を検出する前輪側傾斜角検出手段と、走行機体3の走行速度を検出する車速検出手段とを設け、制御部は、前輪側傾斜角検出手段によって事前に検出されたフロントアクスルケース23の左右傾斜角と、車速検出手段からの検出結果とによって、走行機体3のその後の左右傾斜角を予測し、予測結果及び傾斜角検出手段36の検出結果に基づいて左右傾斜制御を実行する。
(もっと読む)
苗移植機
【課題】
機体の走行により圃場の面積を算出し、算出した面積から苗の植付作業の進捗具合、苗や施肥肥料の使用量、作業に要する時間等を算出可能な苗移植機を提供する。
【解決手段】
後輪2,2の駆動回転を検出する回転検出部材1を設け、回転検出部材1が検出する後輪2,2の回転数から走行距離を算出する走行車体3に苗植装置4を設けた苗移植機において、回転検出部材1の検出結果と、走行車体3の前側に設ける前輪5,5の操向旋回を検出する操向検出部材6の検出結果によって、各植付走行条の走行距離Bと、植付走行条の端部での折返旋回距離Cを算出し、走行距離Bと折返旋回距離Cから苗植付条面積Eを算出する構成とする。
(もっと読む)
苗移植機
【課題】 旋回時、植え付け装置を機械的に自動上昇させる、安価な苗移植機の実現。
【解決手段】 走行車体2の車輪10の方向を制御するピットマンアーム60と、走行車体2の後側に設けられ、昇降油圧シリンダによって昇降させられる植え付け装置と、植え付け装置の昇降、植え付けを設定するための植え付け昇降レバー33と、昇降レバー33の操作に従って、昇降油圧シリンダを制御するカム74、位置決めローラ77等と、ピットマンアーム60に連結された連繋部材61、62、64、71と、連繋部材61、62、64、71に連結された旋回切替操作具73とを備え、旋回切替操作具73は、操舵部材が所定量以上回動すると、カム74、ローラ77などを機械的に駆動することによって植え付け装置52を上昇させるモードと、操舵部材が所定量以上回動しても、カム74、ローラ77などを駆動しないモードが選択出来る。
(もっと読む)
移動農機
【課題】使用頻度の高いエンジンの高回転域で、安定した作業速度を確保して作業の高能率化を図ることができるようにした移動農機を提供しようとするものである。
【解決手段】エンジン2の出力回転数を変更するアクセルペダル87と、前記アクセルペダル87の操作位置を検出するアクセルセンサ92を備え、前記アクセルセンサ92の出力に基づき、アクセルセンサ92の出力に対応するエンジン2回転数が、エンジン2の出力回転数として得られるように、前記出力回転数を制御するように構成する移動農機において、前記出力回転数の上限を設定する上限設定手段30,99,100を備え、前記アクセルセンサ92の出力に対応するエンジン2回転数が、前記上限設定手段30,99,100により設定した上限回転数よりも高い場合には、前記上限回転数が前記出力回転数として得られように、前記出力回転数を制御するように構成したものである。
(もっと読む)
農業用作業車両
【課題】簡単な構成で旋回操作の開始及び終了を検出することが可能な農業用作業車両を提供する。
【解決手段】サイドクラッチ操作機構45は、ステアリングハンドル7が所定の操作量以上操作された場合に、サイドクラッチを切断する。クラッチセンサ49L,49Rは、サイドクラッチの作動状況を検出可能である。制御部は、植付部を昇降駆動するための昇降シリンダの駆動を制御する。植付クラッチは、植付部に対する駆動力の伝達の有無を切換可能である。また、前記制御部は、植付部の作動中において、植付クラッチの切断、サイドクラッチの切断、及び後進操作を、旋回時自動昇降制御の開始トリガとして検出可能である。そして、前記制御部は、開始トリガのうち何れか1つを検出すると、植付部を上昇させ、その後、前記サイドクラッチの接続を検出すると、植付部を下降させる。
(もっと読む)
農作業車
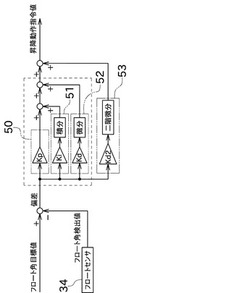
【課題】本発明では、機体の大部分を占める板金部分に角速度センサを取り付けるにあたり、板金の振動を拾い難い状態で角速度センサを取り付けて機体の傾きを正確に検出できるようにすることを課題とする。
【解決手段】センサ取付面54と機体取付面55からなるセンサブラケット53を、板金部材50の折曲部52の近傍に前記センサブラケット53のセンサ取付面54を配置する構成とし、前記板金部材50の直線部分51の略全域にわたって前記センサブラケット53の機体取付面55を重ねて張り付ける構成とし、前記センサ取付面54に機体の傾斜を検出する角速度センサ24を取り付けたことを特徴とする農作業車の構成とする。また、 前記板金部材50は操縦部CのステップSから立設していて上方に座席8を載置している仕切り板で構成したことを特徴とする農作業車の構成とする。
(もっと読む)
直播機
【課題】硬軟センサの設置位置を工夫することにより、苗植付深さ又は播種深さの制御度合いを高めた直播機を提供すること。
【解決手段】走行車体2の後部に複数条分の種子を圃場に移送する移送管93,95を備えた直播装置82と移送管93,95の種子排出口を圃場上に向けて保持するフロート55,56を走行車体に対して油圧シリンダ46とリンク装置3により昇降自在に設け、フロート55,56の前方に接地して地面を整地するロータ27a,27bを直播装置82に対して昇降自在に設け、フロート55,56とロータ27a,27bの間に圃場の硬軟センサ114を設け、該センサ114の検出値に応じて油圧シリンダ46を伸縮して直播装置82の播種深さを調節する制御装置101を設けている。
(もっと読む)
作業車両
【課題】傾斜センサや加速度センサは高価な備品であり、できればそのような高価な備品を使用しないで作業機を適切に操縦できる走行車両を提供すること。
【解決手段】一対の後輪3,3の上部を覆う左右後部フェンダ21,21またはその近傍にそれぞれGPSアンテナ20L,20Rを装着し、また走行車両の前方のカビネットの天井部にもGPSアンテナ20Fを装着し、アンテナ20L,20Rにより、またはアンテナ20L,20R,20Fにより走行車両の左右方向又は前後方向の傾斜度合いをGPSとの送受信で検出でき、作業機の水平制御などを行うので、その制御の精度が優れたものとなり、高価な角速度センサをはじめ、作業機姿勢制御用の各種センサが不要になる。
(もっと読む)
乗用型苗移植機
【課題】旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、旋回操作性の点において課題があった。
【解決手段】操向用の左右前輪6を設けた走行車両1に苗移植作業装置3を昇降自在に装着した乗用型苗移植機において、左右前輪6を所定角度以上に操向操作すると苗移植作業装置3を上昇させる指令を出力して苗移植作業装置3を上昇させ、且つ、走行距離算出手段にて走行距離を算出して、該走行距離に応じて苗移植作業装置3が下降する指令を出力する自動旋回モード中に、機体の前進速度が所定速度よりも速い場合または左右前輪6の操向操作速度が所定速度よりも速い場合には、上記苗移植作業装置3を上昇させる速度を速くする制御装置170を設けた乗用型苗移植機。
(もっと読む)
均平作業方法
【課題】
高低差のある圃場等の区画を、牽引車両に牽引される均平機を用いて均一平面にする方法において従来はレーザ光を基準にして、均平板に土を抱えられる程度に高さを保持し、土を抱えなくなったら徐々に均平板を下げることを繰り返しながら均一にしていた。その結果最後まで均一高さにならず、均平作業後半で低い部分があった場合には、全体から広く薄く運土せねばならず非効率的であった。また、オペレータは常に後方を振り返り均平板の土の様子を見ながら作業せねばならず危険であった。
【解決手段】
本願は均平作業前に圃場高さを測定し、均平にしたときの均平基準面高さを算出し、基準高さと比較した高低マップを運転席に表示し、均平作業中もリアルタイムに測定し高低マップを書き換え、効率的に作業を行えるようにした均平方法である。
(もっと読む)
作業機の姿勢制御装置
【課題】ロータリ耕耘機などの農作業機の左右方向の傾斜を略一定に維持する傾斜角自動制御、または耕耘爪が圃場を耕耘する深さを略一定に維持する耕耘深さ自動制御なども容易にできる作業機の姿勢制御装置を提供する。
【解決手段】作業車両に農作業機をリンク機構を介して昇降可能に装着し、昇降制御アクチュエータと、傾斜制御アクチュエータと、前記作業車両の水平に対する左右方向の傾斜角を検出する本機ローリングセンサ120と、前記作業車両の左右方向の傾動の角速度を検出する本機ローリングジャイロセンサ121と、前記昇降制御アクチュエータ及び前記傾斜制御アクチュエータを作動する姿勢制御手段とを備えてなる作業機の姿勢制御装置において、前記農作業機の左右方向の傾動の角速度を検出する作業機ローリングジャイロセンサ132と、前記農作業機の上下動の角速度を検出する作業機ピッチングジャイロセンサ133とを備えたものである。
(もっと読む)
作業機の姿勢制御装置
【課題】耕耘機の左右の耕耘土量が異なる耕耘作業、または傾斜地の耕耘作業などで、傾斜角自動制御、または耕耘深さ自動制御なども容易にできる作業機の姿勢制御装置を提供する。
【解決手段】左右リヤカバー43a,43b間の隙間を各側板70a,70bにて閉塞したから、左右リヤカバー43a,43bの上面側に付着する土量を低減させ、左右リヤカバー43a,43bの重量がこの上面の土量にて変化するのを防ぎ、左右リヤカバー43a,43bのセンサ機能を適正に維持し、ロータリ耕耘機24の左右傾斜角を略一定に維持する傾斜角自動制御、または耕耘爪40の耕耘深さを略一定に維持する後述の耕耘深さ自動制御を実行する。また、前記複数のリヤカバーの少なくとも一つの上下動を検出するリヤカバーセンサの検出結果に基づき、傾斜制御アクチュエータまたは昇降制御アクチュエータを作動させる。
(もっと読む)
三次元測位システムを利用した均平作業機と均平工法
【課題】
高低差のある圃場等の区画を、牽引車両に牽引される均平機を用いて均一平面にする方法において従来はレーザ光を基準にして、均平板に土を抱えられる程度に高さを保持し、土を抱えなくなったら徐々に均平板を下げることを繰り返しながら均一にしていた。その結果最後まで均一高さにならず、均平作業後半で低い部分があった場合には、全体から広く薄く運土せねばならず非効率的であった。また、オペレータは常に後方を振り返り均平板の土の様子を見ながら作業せねばならず危険であった。
【解決手段】
本願は均平作業前に圃場高さを測定し、均平にしたときの均平基準面高さを算出し、基準高さと比較した高低マップを運転席に表示し、均平作業中もリアルタイムに測定し高低マップを書き換え、効率的に作業を行えるようにしたものである。
(もっと読む)
走行機に連結される作業機
【課題】 水田等の圃場の作業残隅部の作業処理は、その作業がトラクタを反転させる等の困難な作業が多かった。また、畦等の被作業面が直線でない場合や、草や樹木などの異物がある場合正確に作業が行えない課題があった。
【解決手段】 作業機Aは、装着フレーム1等に設ける回動支点14を中心に回動可能かつ伸縮可能な回動部2と、回動部2に設けた作業部回動支点32を中心に回動可能な作業部3と、回動部2の回動変位量及び伸縮量と作業部3の回動変位量とを制御する制御部4と、制御部4を操作可能な操作部5を有し、作業部3は、走行機Bを走行させた状態で走行機Bの進行方向にほぼ平行な面を作業面34aとして作動することが可能であり、かつ走行機Bの後方に位置させた状態で走行機Bの進行方向とほぼ直交する面を作業面34bとして作動することが可能である。
(もっと読む)
作業車の作業装置昇降操作装置
【課題】 作業装置昇降用のポジション制御弁がポジションレバー30や電動モータ31によって操作される作業車において、電動モータ31によるポジション制御弁の操作によって作業装置が上昇された後、ポジションレバー30をわずかに上昇側に操作すれば、電動モータ31による作業装置上昇保持を解除できるようにする。
【解決手段】 ポジションレバー30の上昇側の操作限界を設定するストッパー61を、作用位置変更自在に設けてある。電動モータ31を操作する昇降制御手段は、ストッパー61の作用位置を検出するセンサ64、及びポジションレバー30の操作位置を検出するセンサ67の検出情報を基にストッパー61がストップ作用したことを検出し、この検出結果を基に、電動モータ31を下降操作側に操作する。
(もっと読む)
1 - 17 / 17
[ Back to top ]