
Fターム[2B396QA22]の内容
脱穀機要素−籾処理 (10,947) | 検出の目的又は検出量 (294) | 検出内容又は検出量 (190) | 角度 (51) | 回転角 (33)
Fターム[2B396QA22]に分類される特許
21 - 33 / 33
コンバインの穀粒排出装置
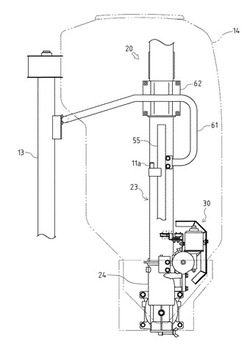
【課題】穀粒排出装置の縦オーガ後方に空き空間を確保する。
【解決手段】グレンタンク14内の穀粒を排出コンベアから受け継ぎ、機外へ排出する縦オーガ23と横オーガとを備え、該縦オーガ23を機体フレーム上に旋回可能に支持したコンバインの穀粒排出装置20において、前記縦オーガ23下部とグレンタンク14下部とを連結する連結部材24を機体フレームに固設して、該連結部材24に縦オーガ23を旋回可能に支持し、該連結部材24に縦オーガ旋回用の駆動機構30を設け、該駆動機構30を機体側方側に配置した。
(もっと読む)
操作具

【課題】作業者等が、排出オーガを所望の方向に回動させるために必要な操作具での操作を容易に素早く認識することができ、且つ排出オーガの操作間違いが起こり難い操作具を提供する。
【解決手段】平面内で回転可能な回転台20と、該回転台20上に上下回動可能なレバー21とを具備するとともに、前記回転台20の回転を検知する手段26と、レバー21の上下回動を検知する手段27を具備し、前記レバー21の上下方向の回動角と旋回方向の回動角と、排出オーガ15の上下方向の回動角と旋回方向の回動角をシンクロさせた。
(もっと読む)
粉粒体排出装置
【課題】排出オーガ6の操作性や作業性を向上させること。
【解決手段】穀粒を排出するオーガの移動オーガの軸心に直交する方向に所定角度左右回動する穀粒排出部21の左右回動の限界位置を検出手段48、49で検出し、前記左右回動限界位置の情報を報知手段52aで報知させる。前記報知手段52aは、オーガに設けても良く、作業者はオーガ部分を目視したまま作業ができ、穀粒排出作業性が良くなる。更に前記報知手段52aは、視覚により認識可能な手段であっても良い。視覚により認識可能であれば、作業者にすぐに分かるため、操作性が向上する。
(もっと読む)
粉粒体排出装置
【課題】オーガ6の穀粒排出部21の左右回動角度の可能範囲が容易にわかり、排出オーガ6の穀粒排出口21aの詰まりを防止して、操作性や作業効率の良い粉粒体排出装置の提供である。
【解決手段】穀粒を排出するオーガ6の先端に設けられ、オーガ6の軸心に直行する方向に所定角度で左右回動する穀粒排出部21の左右回動角度をセンサ55により検知して、検知した左右回動角度の情報から左右回動可能な範囲を決定し、該可能な範囲の情報について報知手段52により報知させ、前記可能な範囲が限界に近づいた場合に前記報知内容を変化させる粉粒体排出装置により解決できる。また、前記報知手段52が音を発生するブザー52aであり、前記可能な範囲に関する情報について前記ブザー52aにより音を発生させる構成にしても良い。
(もっと読む)
コンバインにおける穀粒排出用オーガの無線式操作装置
【課題】 穀粒の排出位置の調節を簡単な操作で行うことができるコンバインにおける穀粒排出用オーガの無線式操作装置を提供すること。
【解決手段】 コンバイン本体に、走行状態と走行停止状態とに切換える走行状態切換手段、その走行状態切換手段を操作する走行用アクチュエータ、及び、その走行用アクチュエータの作動を制御する走行制御手段が備えられ、無線式指令手段42が、走行指令及び走行停止指令を指令する走行指令手段51,52を備えて、この走行指令手段による走行指令及び走行停止指令を無線信号にて指令するように構成され、走行制御手段が、無線式指令手段が指令する走行指令及び走行停止指令に基づいて、走行用アクチュエータの作動を制御するように構成されているコンバインにおける穀粒排出用オーガの無線式操作装置。
(もっと読む)
コンバイン
【課題】穀粒タンクの昇降を行なう作業者が周囲に気を配っていても、コンバインの周囲が騒がしかったりする場合等は、周囲の人や装置が上下昇降している穀粒タンクに接触してしまうおそれがあった。
【解決手段】運転部5と、機体フレーム2上に昇降可能に配設される穀粒タンク4と、ストロークセンサ36と、機体フレーム2の傾斜角度を計測する傾斜センサ37と、主クラッチペダルがブレーキ位置にあるか否かを検知する主クラッチペダルセンサ85と、脱穀クラッチのON・OFFを検知する脱穀クラッチセンサ87とを有するコンバイン100において、該コンバイン100外側に警報ランプ93若しくは警報ブザー94を配設し、該穀粒タンク4の下降時に、該警報ランプ93若しくは警報ブザー94が作動する構成とした。
(もっと読む)
コンバインにおける排出筒の旋回制御手段
【課題】旋回がギヤによって駆動される排出筒が、上昇時にギヤのバックラッシュによりフリーに回動して運転席側と接衝することを防止するコンバインにおける排出筒の旋回制御手段を提供することを課題としている。
【解決手段】走行機体1の運転席の後方に位置する穀粒タンク7から穀粒を排出する排出オーガの上下揺動及び左右旋回自在に取り付けられた排出筒9の左右旋回機構が、排出筒9側に設けられたギヤに噛合し、排出筒9に旋回駆動力を伝動する駆動ギヤを備えているものにおいて、駆動機構をコントロールする制御手段21側に、上記ギヤと駆動ギヤとのバックラッシュによる排出筒9の右回動を規制する回動規制手段を設けた。回動規制手段は、排出筒9を格納姿勢から上昇させる際、駆動ギヤを排出筒9の左旋回方向に、上記バックラッシュを解消する角度回転させる手段又は排出筒9を格納姿勢から上昇させる際、走行機体1が予め定められた所定角度以上傾斜している場合に、上記水平制御機構により、走行機体1を水平状態とする手段とした。
(もっと読む)
コンバイン
【課題】 運転作業者と補助作業者とがコンバインを使用した共同作業を行う場合に、発生した異常に応じた適切な処置を迅速に行うことができるコンバインを提供すること。
【解決手段】 コンバイン本体に、携帯式の無線式通信装置42からの無線信号を受信する受信装置56,57,58が備えられたコンバインであって、無線式通信装置が、通報指令を指令する通報指令手段を備えて、この通報指令手段による通報指令を無線信号で送信するように構成され、コンバイン本体に、呼出し用の通報手段65,66、及び、受信装置が通報指令を受信するに伴って、通報手段を通報作動させる通報用の制御手段Hが設けられているコンバインを構成した。
(もっと読む)
排出オーガ制御装置
【課題】排出オーガが収納位置にある場合における排出スイッチの誤操作の防止を損なうことなく、必要により排出オーガの稼動が可能となる排出オーガ制御装置を提供することにある。
【解決手段】排出オーガ制御装置は、排出オーガ22が所定の収納位置Aにある場合に限り、排出スイッチ33の信号を受けても排出オーガ22の稼動を規制する制御部31を備えて構成され、この制御部31は、搭載機器についての所定の特例条件の当否を判定する特例条件判定手段を備え、その該当判定下において受けた排出スイッチ33の信号に応じて排出オーガ22を稼動するように構成する。
(もっと読む)
コンバイン
【課題】排出オーガの位置の影響を受けることなく精度良く排出重量を算出するコンバインを提供する。
【解決手段】穀物タンク7の重量を一定間隔t1で計測する重量センサ(計測手段)73と、排出オーガ8を操作するオーガコントローラ(操作部)と、排出オーガ8が一定量(360度)旋回したこと検出するオーガ旋回角センサ(検出手段)93とを備え、排出作業前の穀物タンク7の重量は、オーガコントローラ(操作部)が操作される一定時間t2前に重量センサ73にて計測した第1計測値であり、排出作業後の穀物タンク7の重量は、オーガコントローラ(操作部)が操作された後、オーガ旋回角センサ93によって排出オーガ8が一定量(360度)旋回したことを検出した一定時間t3後に重量センサ73にて計測した第2計測値であり、第1計測値及び第2計測値を用いて穀物の排出重量を算出する。
(もっと読む)
粉粒体搬送装置
【課題】
粉粒物を機外へ移送排出する移送排出筒装置の先端部へ設けて、粉粒物を機外へ排出する回動移動自在な排穀口を有する排出筒の回動移動をスムーズにすると共に、該排出筒内へ詰まる穀粒を検出する詰まりセンサを設けようとするものである。
【解決手段】
粉粒物を機外へ移送排出する移送排出筒装置の移動用移送筒の移送終端部側へ粉粒物を機外へ排出する。回動装置の回動用モータで回動自在な排穀口を有す排出筒を設け、回動用モータは、移動用移送筒へ軸支内装して、粉粒物を移送排出する移動螺旋軸の軸芯より、下部へ設けた。排出筒の一方側へ回動用モータを、他方側へ排出筒内での粉粒物の詰まりを検出する詰まりセンサを設け、回動用モータと、排出筒の回動位置を検出するポテンションメータとは、移動用螺旋軸の軸芯に対して、上下対向位置へ設け、回動用モータと、ポテンションメータとは、排出筒の排穀口に対して、前後対向位置へ設けた構成である。
(もっと読む)
粉粒体搬送装置
【課題】
粉粒物を機外へ移送排出する移送排出筒装置の移動用移送筒を長手方向へ伸張、及び短縮移動させると共に、この移動用移送筒へ設けて、粉粒物を機外へ排出する排穀口を有する排出筒を円周方向へ回動移動自在に設けようとするものである。
【解決手段】
粉粒物を機外へ移送排出する移送排出筒装置の移動用移送筒を長手方向へ伸縮移動装置で伸張、及び短縮移動自在に設けると共に、移動用移送筒の先端部へ設けて、粉粒物を機外へ排出する排穀口を有する排出筒を、円周方向へ回動装置で回動移動自在に設けた。移動用移送筒の移動と、排出筒の回動とは、一本の回動スイッチレバーの操作で行う。この回動スイッチレバーと、縦移送筒を旋回操作する操作スイッチレバーとは、同一操作面へ前後方向略45度の角度で設けた。移送排出筒装置等の始動は、排出スイッチで行い、停止は該排出スイッチか、又は緊急停止スイッチか、いずれか一方で行う構成である。
(もっと読む)
穀粒排出装置
【課題】操作性の優れた遠隔操作手段を備えたコンバインや穀粒専用運搬車などの穀粒搬出装置を提供すること。
【解決手段】排穀オーガ5を遠隔操作により作動制御が可能で、かつ穀粒排出装置を備えた機体の進行方向に向って少なくとも排穀オーガ5の上下、左右方向への移動、穀粒の排出、排穀オーガ5の所定位置への張出、及び排穀オーガ5の所定位置への収納用のスイッチ群45を設けた遠隔操作手段44を設け、前記排穀オーガ5から穀粒を排出している場合には、張出、収納用のスイッチ45hを作動不能にする制御装置100を設けた穀粒排出装置である。遠隔操作手段44には排穀オーガ5から穀粒を排出している場合には、張出、収納用のスイッチ45hの操作を受け付けないので、穀粒排出中に不用意に遠隔操作手段44を操作して排穀オーガ5の自動張出又は自動収納を行うことがないので、穀粒が不用意に外部にこぼれ落ちることがない。
(もっと読む)
21 - 33 / 33
[ Back to top ]