
Fターム[2C001BC08]の内容
Fターム[2C001BC08]に分類される特許
141 - 160 / 569
方向検出装置及びこれを用いたゲームシステム
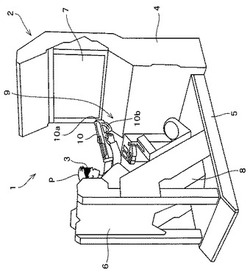
【課題】地磁気センサを利用した補正を適切に行うことが可能な方向検出装置を提供する。
【解決手段】本体部としての筐体2とその筐体2に対して方向が変化する可動部としての3Dグラス3とを有するゲーム機1に適用される方向検出装置において、筐体2に設置される固定側地磁気センサ18と、3Dグラス3に設置されるジャイロセンサ15と、3Dグラス3に設置される可動側地磁気センサ17とを設け、ジャイロセンサ15の出力に基づいて、3Dグラス3の筐体2に対する方向を判別し、固定側地磁気センサ18及び可動側地磁気センサ17のそれぞれの出力に基づいて、ジャイロセンサ15の出力に基づいて判別した方向を補正する。
(もっと読む)
コンピュータシステムおよびプログラム

【課題】オブジェクトに付与されたIDの使用登録によってゲーム内で使えるキャラクタを管理するゲームにおいて、重複するキャラクタとなるIDでもゲームで利用できるようにする。
【解決手段】同じ選手が対応づけられるオブジェクトを重複登録可能とするとともに、重複登録されたオブジェクトの選手の能力を初期状態から高める特典を付与する。
(もっと読む)
画像表示プログラム、画像表示システム、画像表示方法および画像表示装置
【課題】写実的な表現を実現しつつ比較的軽い処理負荷で、複数のオブジェクトを含む仮想三次元空間を描画可能とすること。
【解決手段】複数のオブジェクトが存在する仮想三次元空間を仮想カメラで撮影して描画する画像表示装置のコンピュータで実行される画像表示プログラムであって、そのコンピュータを、仮想カメラから見て第1オブジェクトと第2オブジェクトが重なるときに、画像内の階調情報が第2オブジェクトから第1オブジェクトの各部までの距離により変化するような第1オブジェクト用のシルエット画像を生成するシルエット画像生成手段、仮想カメラから見た第2オブジェクトの画像を生成する第2オブジェクト描画手段、および第2オブジェクトに近い第1オブジェクトの部位に対応する部分ほど色が濃くなるように、シルエット画像を第2オブジェクトの画像に合成する合成手段として機能させる、プログラム。
(もっと読む)
ゲームシステム、ゲームサーバー、Webサーバー、業務用ゲーム装置、端末装置
【課題】業務用ゲーム装置と家庭用ゲーム装置等との関連性をより高めることのできるゲームシステム、プログラムおよび情報記憶媒体を提供すること。
【解決手段】業務用ゲーム装置でのゲーム成績をリアルタイムに演算するゲーム成績演算部120を設け、さらに、演算されたゲーム成績をWeb用データ生成部310で加工して、加工されたWeb用データに基づき、家庭用ゲーム装置のブラウザーでゲーム成績を表示する。
(もっと読む)
プログラム、情報記憶媒体及び画像生成システム
【課題】立体視に好適な表示態様での情報表示オブジェクトの表示を可能にするプログラム、情報記憶媒体、画像生成システム等の提供。
【解決手段】画像生成システムはオブジェクト空間設定部と仮想カメラ制御部と画像生成部を含む。オブジェクト空間設定部は、オブジェクト空間において、曲率中心が仮想カメラ側にある湾曲面上に、観者に情報を表示するための情報表示オブジェクトを配置設定する。画像生成部は、オブジェクト空間において左目用仮想カメラから見える画像である左目用画像と、オブジェクト空間において右目用仮想カメラから見える画像である右目用画像とを生成して、情報表示オブジェクトが立体視表示される画像を生成する。
(もっと読む)
プログラム、情報記憶媒体及び画像生成システム
【課題】状況に応じた適切な立体視表現を実現できるプログラム、情報記憶媒体、画像生成システム等の提供。
【解決手段】画像生成システムは、オブジェクト空間設定部と、キャラクタ制御部と、仮想カメラ制御部と、キャラクタ又は仮想カメラの位置情報、方向情報及び移動状態情報の少なくとも1つに基づいて、立体視画像を生成するための左目用仮想カメラと右目用仮想カメラとの間の距離を表すカメラ間距離の設定処理を行うカメラ間距離設定部と、オブジェクト空間において左目用仮想カメラから見える画像である左目用画像と、前記オブジェクト空間において右目用仮想カメラから見える画像である右目用画像とを生成する画像生成部を含む。
(もっと読む)
携帯型情報処理装置、携帯型ゲーム装置
【課題】立体視画像を表示する立体画像表示部を備えた装置において、操作性や立体視画像の視認性に優れた携帯型の情報処理装置およびゲーム装置を提供する。
【解決手段】ゲーム装置は、裸眼で立体視可能な画像を表示する立体画像表示装置と、平面画像を表示する平面画像表示装置とを備える。平面画像表示装置の画面にはタッチパネルが設けられる。平面画像表示装置には、仮想空間のオブジェクトをシルエット表示した画像が表示される。ゲーム装置は、平面画像表示装置の画面に表示されたシルエット表示の画像に対するタッチ操作に応じて、仮想空間のオブジェクトを動作させて、立体画像表示装置に当該オブジェクトを立体表示する。
(もっと読む)
ゲームプログラムおよびゲーム装置
【課題】複数のキャラクタが登場する一人プレイ可能なゲームにおいて、ゲームの進行がユーザのプレイスキルに影響されることの少ないゲームプログラムおよびゲーム装置を提供する。
【解決手段】プレイヤオブジェクト制御手段は、プレイヤオブジェクト活動能力値を記憶する手段と、プレイヤオブジェクトが受けたダメージに応じてプレイヤオブジェクト活動能力値を減少させる手段とを含む。ゲーム進行制御手段は、プレイヤオブジェクト活動能力値が所定値以下になったとき、活動能力値が所定値より大きいノンプレイヤキャラクタが存在するかを判断し、存在する場合にはゲームを終了させずゲームの進行を継続する。
(もっと読む)
ゲーム装置、ゲーム装置の制御方法、及びプログラム
【課題】ゲームプレイ中におけるプレイヤの位置のずれの対処を図ること。
【解決手段】位置取得部82は、プレイヤ100を撮影する撮影手段から得られる撮影画像と、深度測定手段の測定基準位置とプレイヤ100との間隔に関する深度情報と、に基づいて、3次元空間におけるプレイヤ100の位置に関する3次元位置情報を生成する位置情報生成手段から3次元位置情報を取得する。判定部84は、3次元空間におけるプレイヤ100の位置が判定対象空間内に含まれるか否かを判定する。ゲーム処理実行部86は、判定手段の判定結果に基づいてゲーム処理を実行する。判定対象空間変更部88は、3次元空間におけるプレイヤ100の位置が判定対象空間内に含まれないと判定された場合、3次元空間におけるプレイヤ100の位置に基づいて、判定対象空間の位置を変更する。
(もっと読む)
ゲーム装置、ゲーム装置の制御方法、及びプログラム
【課題】ゲームプレイ時の操作性や視認性を維持しつつ、視野を拡大させること。
【解決手段】ゲーム装置10は、仮想カメラ46から仮想3次元空間40を見た様子を表す画像を表示する。第1の表示制御部62は、プレイヤの操作対象の正面方向又は進行方向に対応する第1の視線方向、及び、第1の画角を仮想カメラ46に設定し、仮想カメラ46から仮想3次元空間40を見た様子を表す画像を表示手段に表示させる。プレイヤにより方向指示操作が行われた場合、方向指示操作によって指示された方向と第1の視線方向とに基づいて決定される第2の視線方向、及び、第1の画角よりも大きい第2の画角を仮想カメラ46に設定し、仮想カメラ46から仮想3次元空間40を見た様子を表す画像を表示手段に表示させる。
(もっと読む)
ゲーム装置、動作方法、ならびに、プログラム
【課題】立体画像を見るユーザの目の疲労を抑制するのに好適なゲーム装置、動作方法、ならびに、プログラムを提供する。
【解決手段】生成部202は、記憶部201に記憶される、2組の、視点の位置および投影面の位置ならびに向きに基づいて、当該視点のそれぞれからみた仮想空間内の様子を、対応する投影面に投影して、2つのゲーム画像を生成することを繰り返す。2つの視点の距離はわずかに所定の距離だけ離れており、表示部203は、2つのゲーム画像が生成されるごとに立体視の方式に合わせて表示する。更新部204は、ゲームの進行に応じて、視点の位置を近付けるように記憶部201を更新する。
(もっと読む)
姿勢情報算出装置、姿勢情報算出システム、姿勢情報算出方法及び姿勢情報算出プログラム
【課題】簡易な構成でありながら、位置の発散を抑制して仮想3次元空間における姿勢を適切に算出することができる姿勢情報算出装置、姿勢情報算出システム、姿勢情報算出方法及び姿勢情報算出プログラムを提供する。
【解決手段】センサー情報取得部210は、3つの角速度センサーがそれぞれ検出する3軸回りの角速度情報(GX、GY、GZ)と3つの加速度センサーがそれぞれ検出する3軸方向の加速度情報(AX、AY、AZ)を取得する。姿勢情報算出部220は、角速度情報(GX、GY、GZ)と加速度情報(AX、AY、AZ)に基づいて、仮想3次元空間における姿勢角と位置座標を算出する。特に、姿勢情報算出部220は、加速度情報(AX、AY、AZ)から得られる慣性座標系加速度ベクトル(A)に基づいて固定座標系速度ベクトルを算出し、当該固定座標系速度ベクトルに対応づけて仮想3次元空間における位置座標を算出する。
(もっと読む)
情報処理プログラム
【課題】ユーザが手に持って使用する入力装置を用いて従来にはない新たな操作が可能な情報処理システムおよびそれにおいて用いられるプログラムを提供する。
【解決手段】ゲームシステムは、画像取得手段と、方向算出手段と、第1回転手段と、表示制御手段とを備えている。画像取得手段は、撮像装置によって撮像された画像を取得する。方向算出手段は、取得された画像内に含まれる撮像対象の画像から一意に決定される方向を算出する。第1回転手段は、算出された方向に応じて操作対象を回転させる。表示制御手段は、第1回転手段による操作対象の回転に応じた画像を生成して表示装置の画面に表示させる。
(もっと読む)
情報処理システムおよびプログラム
【課題】ユーザが手に持って使用する入力装置を用いて従来にはない新たな操作が可能な情報処理システムおよびそれにおいて用いられるプログラムを提供する。
【解決手段】ゲームシステムは、画像取得手段と、方向算出手段と、移動手段と、表示制御手段とを備えている。画像取得手段は、撮像装置によって撮像された画像を取得する。方向算出手段は、取得された画像内に含まれる撮像対象の画像から一意に決定される方向を算出する。移動手段は、算出された方向に応じて操作対象を予め決められた方向へ移動させる。表示制御手段は、移動手段による操作対象の移動に応じた画像を生成して表示装置の画面に表示させる。
(もっと読む)
画像認識装置および操作判定方法並びにプログラム
【課題】的確な操作の判定を可能にすること。
【解決手段】操作者102は、その右目504と左目503とにより三次元ディスプレイ111上に表示された画像502及び仮想操作面画像501とを見るが、仮想操作面画像501は、それぞれ右目504及び左目503で見ることにより三次元ディスプレイ111から操作者の前面にあるように立体表示される。この仮想操作面が立体表示される位置を、上述のビデオカメラ201で撮影した操作者の像や位置から決定して三次元ディスプレイ111に表示する。仮想操作面と、操作者102との相対関係を用い、操作者102の一部が操作面のビデオカメラ201から見て手前に来ると、操作が開始されたと判断し、各部の形状や動きから、その形状、動きが予め想定されたいずれの操作であるかを判定する。
(もっと読む)
ゲームプログラム、ゲーム装置、ゲーム制御方法
【課題】現実世界において、ある選手の作戦が他の選手にリアルタイムに与える影響を再現できるゲームを、提供することにある。
【解決手段】本プログラムでは、まず、キャラクタの送出動作の対象となる送出対象領域70が、ゲーム空間に設定される。次に、移動体Bがキャラクタから送出されたときに、移動体Bが送出対象領域70に到達する位置が、第1到達位置M1として認識される。続いて、第1報知子C1が、画像表示部3に表示される。続いて、移動体Bの送出後、再度、移動体Bがキャラクタから送出されたときに、移動体Bが送出対象領域70に到達する位置が、第2到達位置M2として認識される。続いて、第1到達位置M1と第2到達位置M2との間の距離が、所定の距離以上離れていた場合、第2報知子C2が、第1報知子C1とは異なる表示態様で、画像表示部3に表示される。
(もっと読む)
ドミノたおしに使用する絵図
【課題】 本発明は 単純な遊びのドミノたおしを教育、医療分野で利用できるものへ変化発展させたものである。
【解決手段】 ドミノたおしの牌を置く位置を描いた絵図の上で絵図に従って牌を並べてゆくことで、手先の器用さと集中力の持続を育て上達させることができる。絵図に難易度を設け、各人のレベルを知ることができる。又、電子画面用のゲームに、絵図を用いたドミノたおしを使用することで、平面で無くともドミノたおしを遊ぶことができる。
(もっと読む)
ゲーム装置およびゲームプログラム
【課題】透明度を用いた簡易な方法で様々なゲーム画像の生成を可能とする。
【解決手段】ゲーム装置は、ポリゴンによって構成されるオブジェクトを少なくとも1つゲーム空間に配置する。ゲーム空間に配置されたオブジェクトのうちの少なくとも1つのオブジェクトが対象オブジェクト81として選出される。また、ゲーム空間内に基準位置が設定される。ゲーム装置は、対象オブジェクトを構成するポリゴンについて、基準位置を基準とした基準領域83内に存在するポリゴンまたは当該ポリゴンの頂点を特定する。さらに、対象オブジェクトのポリゴンまたはポリゴンの頂点に透明度を設定する際、ポリゴン特定手段によって特定されているか否かに応じて異なる透明度を設定する。対象オブジェクトは設定された透明度に基づいて描画され、ゲーム空間の画像が表示装置に表示される。
(もっと読む)
画像生成装置、画像生成方法及び画像生成プログラム
【課題】リアル感を有する3次元画像として移動オブジェクトを表示しつつ、かつ画像処理の軽減化を実現する画像生成装置を提供する
【解決手段】仮想3次元空間にて仮想カメラVCが移動する移動経路MRを予め設定しておき、仮想カメラVCから一定の距離にあるオブジェクト平面OPにおける敵機Eの平面内位置を決定し、仮想カメラVCの位置に応じて、オブジェクト平面OPの仮想3次元空間における位置として、平面位置を決定する。平面内位置及び平面位置に基づいて、仮想3次元空間における敵機Eの位置として、空間内位置を決定する。そして、敵機Eの3次元モデルを空間内位置に配置した時に、仮想カメラVCから見た時の3次元画像を生成する。
(もっと読む)
プログラム、情報記憶媒体及び画像生成装置
【課題】より高速な並列処理を実現すること。
【解決手段】ヒット判定を、メインプロセッサエレメント(MPE10)と複数のサブプロセッサエレメント(SPE)12とで並列処理で実行する。MPE10とSPE12それぞれが分担するノード(ポリゴン集合)の数は、過去のSPEのヒット判定処理結果に基づいてSPEの処理負荷を予測する予測関数f(X)に基づいて、MPE10のヒット判定の処理負荷と、SPE12のヒット判定の処理負荷とがほぼ同等となり、ほぼ同時にヒット判定を終了するように決定する。
(もっと読む)
141 - 160 / 569
[ Back to top ]