
Fターム[2C014DA01]の内容
Fターム[2C014DA01]の下位に属するFターム
アクティブホーミング (32)
セミアクティブホーミング (14)
パッシブホーミング (46)
Fターム[2C014DA01]に分類される特許
1 - 20 / 22
誘導管制装置
【課題】飛しょう体を目標に向けて誘導する飛しょう体誘導管制装置において、目標の運動性能を推定できる機種の類別情報をもとに目標の旋回加速度を推定し、シーカの捜索範囲を設定することにより、旋回する目標に対しても、捕そく性能を向上させるシステムを提供する。
【解決手段】目標12の種類を表わす類別情報をもとに目標12の旋回加速度を推定し、推定した旋回加速度に基づきシーカ10の捜索範囲を算出する。飛しょう体1に搭載されたシーカ10は算出された捜索範囲を捜索することにより、旋回する目標12に対して適切な範囲の捜索が可能であり、目標12の捕そく性能を向上させることができる。
(もっと読む)
ジンバル機構、およびこのジンバル機構を備えた飛しょう体

【課題】飛しょう体の飛翔時に生じる共振を抑制できるジンバル機構、およびこのジンバル機構を備えた飛しょう体を提供することを課題とする。
【解決手段】
ジンバル機構1は、飛しょう体10のベース5に基端部を固定した支持アーム3、4、支持アーム3、4に回動自在に取り付けられた追跡装置2、およびこの追跡装置2と支持アーム3、4を囲むようにベース5に固定された外筒7を有する。そして、このジンバル機構1は、共振を抑制するため、支持アーム3、4と外筒7との間に共振抑制部材9を備えている。
(もっと読む)
ジンバル機構
【課題】設置スペース及び支持部の剛性を削減でき、小型の飛翔体に用いるのに好適なジンバル機構を提供する。
【解決手段】ロール軸周りに回転するロール軸駆動機構12と、このロール軸駆動機構12の回転軸に設置されるフレーム23と、このフレーム23に設置され、ロール軸と直交するヨー軸周りに回転するヨー軸駆動機構22と、このヨー軸駆動機構22の回転軸に設置され、目標を検知する目標検知部21と、を備える。
(もっと読む)
飛しょう体のジンバル保持構造
【課題】従来必要であったスリーブ等の隙間調整を不要とし、飛しょう体の飛しょう時等の振動印加によってもジンバル機構がジンバル軸のスラスト方向及びラジアル方向にがたつくことのない飛しょう体のジンバル保持構造を提供するものである。
【解決手段】ジンバル軸6とサポート部材4の軸受部5との間に介設されるベアリング7a、7bの内輪14,15の内周面とジンバル軸6の外周面との接触面14a、15aにジンバル軸6の外端部から内側に向かうにしたがってジンバル軸6の外径が徐々に大きくなるテーパ面8を形成し、ジンバル軸6におけるテーパ面8の終端部に内側ベアリング7aの内輪14の固定位置を規制する突き当て面9を形成するとともに、ジンバル軸6の外端部に螺着されるナット部材17によって内側ベアリング7aの内輪14および外側ベアリング7bの内輪15をジンバル軸6に締め込むことで内輪14を突き当て面9に当接させて固定する内輪固定部18を設けた。
(もっと読む)
複合誘導装置及び複合誘導方法
【課題】パッシブアンテナ素子のレドームによる影響を軽減し、さらには広い周波数帯での測角を実現する。
【解決手段】飛しょう体における略円筒筐体先端の円形領域の中央に配置され、レドーム11を通じて飛しょう体の正面方向からの電波を受信する第1のパッシブアンテナ素子群A11〜A15と、第1のパッシブアンテナ素子群の素子それぞれの受信信号を用いて目標方向を測角演算するパッシブ処理部17−20と、第1のパッシブアンテナ素子群の周囲に配置され、レドームを通じて飛しょう体正面方向に対して電波を送受信するアクティブアンテナ素子群12と、アクティブアンテナ素子群12の素子それぞれの送受信信号を用いて目標方向を測角演算するアクティブ処理部13〜15と、パッシブ処理部及びアクティブ処理部それぞれで得られる測角演算結果に基づいて飛しょう体を目標方向に誘導する誘導手段16とを具備する。
(もっと読む)
ジンバル機構
【課題】より大きな目標検知部を搭載可能な小型化されたジンバル機構を提供する。
【解決手段】外殻が隔壁を兼ね、ロール軸周りに回転するロール軸駆動機構と、ロール軸駆動機構の回転軸に設置されるフレームと、フレームに設置され、ヨー軸周りに回転するヨー軸駆動機構と、ヨー軸駆動機構の回転軸に設置され、目標を検知する目標検知部と、を備える。また、応用例においては、ロール軸駆動機構のロータディスクと、フレームとを一体に形成したロータフレームを備える。
(もっと読む)
ジンバル機構
【課題】組み立て工程を低減し、ガタつきのないジンバル機構を提供する。
【解決手段】軸方向Xと放射方向Yとにつき背面組み合わせベアリングをフレームに固定することによりジンバル軸をフレームに固定する第1の支持機構と、軸方向Xは自由摺動させ、放射方向Yにつきフレームにつき単列ベアリングをフレームに固定することによりジンバル軸をフレームに固定する第2の支持機構と、を備える。組み立て時における隙間調整が不要となり、飛しょう時等の振動によっても軸方向のガタつきが生じないという効果がある。
(もっと読む)
エレボン制御システム
航空機または無人航空機(UAV)(100、400、1000、1500)を備えるシステムは、胴体収容偏向アクチュエータホーン(621、622)により対向される弾力的に搭載された後縁を有する翼(141、142、1345、1346)を介してピッチ、ロール、および/またはヨーを制御するように構成されている。実施形態は、1つ以上のラダー要素(1045、1046、1145、1146、1245、1345、1346、1445、1446、1545、1546)を含み、かかるラダー要素は、回転可能に取り付けられるとともに、胴体ハウジング(1001)内に配設されるとともに1つ以上のラダー要素に係合するため部分的に延在可能なエフェクタ部材(1049、1149、1249、1349)により作動させてもよい。 (もっと読む)
モジュラーダイバートおよび姿勢制御システム
ビークルを操縦するためのビークル及び方法が開示されている。ビークルは、それぞれが複数の独立して点火可能な固体燃料推進装填材を具備する複数の多インパルスロケットモーターと、前記複数のうち少なくとも1つの多インパルスロケットモーターの少なくとも1つの固体燃料推進装填材を点火するための少なくとも1つのコマンドを発生するプロセッサとを含むことができる。 (もっと読む)
飛しょう体誘導システム
【課題】 発射後、目標を捜索、捕そくし、目標に向かって誘導する飛しょう体の場合、地上・車両・艦船・航空機等に搭載された誘導管制装置からの目標情報の誤差により、飛しょう体の目標に対する捕そく性能を低下させていた。また、他のシステムのレーダ装置を利用する場合には、他システムセンサの目標に対するバイアス誤差、遅れ時間などにより、更に、目標に対する捕そく性能を低下させていた。
【解決手段】 他システムのレーダ装置を含む各装置の位置誤差、遅れ時間等の推定値に基づき、バイアス誤差を推定することにより、バイアス誤差を除いた目標位置を推定し、シーカの捜索方向を指示することにより、目標に対する捕そく性能を確保するようにした。
(もっと読む)
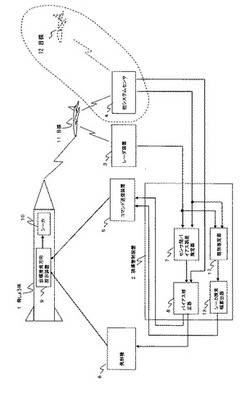
レーザービーム照射システム、レーザービーム照射方法およびレーザービーム中継機
【課題】目視範囲外の目標物に対してレーザービームを照射する。
【解決手段】レーザービームを照射するレーザービーム照射機1と、このレーザービーム照射機1およびレーザービームの被照射体3を目視可能な領域に配備されたレーザービーム中継機2と、からなり、レーザービーム中継機2が、被照射体3を追尾して被照射体3の座標、移動速度、および移動方向を含む追尾情報を取得し、この追尾情報とレーザービーム照射機1から取得される位置情報に基づいて反射板27の姿勢を調整し、レーザービーム照射機1から照射されるレーザービームを反射板27によって被照射体3に向けて反射する。
(もっと読む)
ジンバル機構及び赤外線誘導装置並びにジンバル機構の制御方法
【課題】迅速且つ正確に向きを制御できるジンバル機構及び赤外線誘導装置並びにジンバル機構の制御方法の提供。
【解決手段】ジンバル機構を、検知部2を第1の平面内の第1の軸で回動可能にする第1筐体5a、第1駆動部6a及び第1角度検出部7aと、第1筐体5aを第2の平面内の第2の軸で回動可能にする第2筐体5b、第2駆動部6b及び第2角度検出部7bと、第2筐体5bを第1の平面内の第3の軸で回動可能にする第3筐体5c、第3駆動部6c及び第3角度検出部7cと、第3筐体5cを第2の平面内の第4の軸で回動可能にする第4筐体5d、第4駆動部6d及び第4角度検出部7dとで構成し、第3駆動部6cで第2筐体5bを回動させる際に回転角のずれを打ち消すように検知部2を回動させ、第4駆動部6dで第3筐体5cを回動させる際に回転角のずれを打ち消すように第1筐体5aを回動させる。
(もっと読む)
電力及び制御機構を備えた誘導型発射体
発射体は、電力を生成し、電力を互いに相対回転を有する発射体の2つの部分に配置された部品に供給する機能を有する。発射体は、2つの部分における部品の電力供給が可能な一対の発電機を有する。発射体は、発射体が発射体の長手方向軸に沿って移動する際に発射体の方向を変更する力発生装置を有し、発射体上の力発生装置の相対回転位置は、発電機によって制御される。 (もっと読む)
飛しょう体
【課題】従来の長射程用の飛しょう体は、通信距離及び地球曲面の制約により地上の通信装置と飛しょう体間で直接データリンクを行うことが困難であった。また、射撃の効果を判定するための情報を飛しょう体から地上装置へ伝送する際に、伝送周期が長く、かつ伝送遅延が発生し、正確に射撃の効果を判定できなかった。
【解決手段】誘導のためのコマンドや飛しょう体のステータス等を中継伝送するための中継装置と、目標と会合する状況を撮影するためのIR装置を備える。中継装置は、地上の通信装置からの電波の受信レベルが低下すると飛しょう体から自動的に分離され、パラシュートにより滞空し、飛しょう体と地上の通信装置間の中継伝送を行う。IR装置は目標との会合前に飛しょう体から自動的に分離し、目標と飛しょう体の会合前後の状況を撮影し、画像データを送信する。
(もっと読む)
赤外線検出装置
【課題】目標のロケットプルームからの赤外線放射と背景からの赤外線放射との弁別を容易にして目標の検出精度の向上を図る赤外線検出装置を得る。
【解決手段】目標のロケットプルームが放射する特徴的な分光赤外線放射特性に合致した透過特性を有する狭帯域赤外線透過フィルタ11bと、ロケットプルームの高温ガスの赤外線放射を透過する広帯域赤外線透過フィルタ11aとを有し、目標のロケットプルームから放射される赤外線に基づいて、狭帯域赤外線透過フィルタ11bを通過した後の狭帯域通過電気信号と、広帯域赤外線透過フィルタ11aを通過した後の広帯域通過電気信号とを分離生成する検出信号生成回路10と、検出信号生成回路10で分離生成された狭帯域通過電気信号と広帯域通過電気信号との差信号または積信号から目標抽出画像を生成する目標抽出演算回路20とを備える。
(もっと読む)
滞空ミサイル迎撃システム
【課題】低空で飛来するミサイルをより確実に迎撃する滞空ミサイル迎撃システムを得る。
【解決手段】滞空体により地形や建造物等による影響を受けない上空に滞留し、電波センサ及び光波センサを用いて低空で飛来するミサイルを全周方向かつ比較的遠距離から探知し追尾する。加えて、迎撃ミサイルを回動式のパレットに複数格納し、迎撃ミサイルを発射する際は、所望する飛翔経路の方向に迅速に指向させて発射するとともに、多くの射撃機会を確保する。
(もっと読む)
飛しょう体及び飛しょう体誘導システム
【課題】 地上や車両等に設置された誘導管制装置が、複数ある目標を弁別することが困難な状況であっても、複数の飛しょう体は、複数ある目標のそれぞれ異なる目標に向けて誘導される飛しょう体を得る。
【解決手段】 この発明による飛しょう体は、目標を捜索するシーカと、他の飛しょう体との間で捕捉した目標の位置や速度等の情報を相互に情報伝達する通信装置と、前記通信装置を経由して他の飛しょう体から受信した前記他の飛しょう体が捕捉した目標の位置及び速度等の目標情報に基づいて、捜索範囲に前記他の飛しょう体が捕捉した目標が含まれないように前記シーカの捜索範囲を設定する信号処理部とを備えるようにした。
(もっと読む)
飛しょう体及び飛しょう体誘導方法
【課題】従来の飛しょう体は、誘導のためのコマンドや飛しょう体のステータス等の送受信を、地上の通信装置と飛しょう体間で直接データリンクを行っている。ただし、長射程の飛しょう体を誘導する場合、通信距離及び地球曲面の制約により地上の通信装置と飛しょう体間で直接データリンクを行うことが困難となる。
【解決手段】この発明に関わる飛しょう体は、誘導のためのコマンドや飛しょう体のステータス等を中継伝送するための中継装置を備えたものである。中継装置は、地上の通信装置からの電波の受信レベルが低下すると飛しょう体から自動的に分離され、パラシュートにより滞空し、飛しょう体と地上の通信装置間の中継伝送を行うことができる。
(もっと読む)
誘導弾システム
【課題】 誘導弾システムとしての機動性を失うことなく、誘導弾に対して誘導指令を安定に伝達しながらこれを目標に誘導する誘導弾システムを得る。
【解決手段】 誘導弾システム1を構成する管制装置2及び複数の誘導弾3を、アドホック型の無線ネットワーク4に接続し、それぞれの機器がネットワーク内における中継経路を含めた通信経路情報を決定し更新する。そして、管制装置2と誘導弾3とが、互いに電波到達範囲外になるなど直接の通信が困難な場合にも、中継による通信経路を確保する。また、目標に最接近している誘導弾3aの取得した目標情報もこの無線ネットワーク4を経由して管制装置2や後続の誘導弾3等に確実に伝送し共有することによって、目標の状況変化にも良好に対処する。
(もっと読む)
誘導弾発射システムとその信号処理方法
【課題】目標への距離計測にかかる時間を短縮でき、目標位置を正確に計測できるようにした誘導弾発射システムを提供すること。
【解決手段】1つの誘導弾においてパルス繰り返し周期と目標検出ゲートの位置とを切り替えるのではなく、パルス繰り返し周期と目標検出ゲートの位置とを互いに異ならせた複数の誘導弾を用い、各誘導弾により得られた目標情報を用いて目標までの距離を測るようにする。これにより、HPRF方式を用いる場合においてパルス繰り返し周期と目標検出ゲートの位置とを切り替える回数を減らすことができ、最短で1回で目標位置を求めることができる。このことから誘導弾と目標との距離を速く、正確に計測することができるようになり、目標への距離計測にかかる時間を短縮して目標位置を正確に計測できるようになる。従って射撃統制装置が機能しない場合においても、自律的な迎撃処理を迅速かつ確実に実行することが可能になる。
(もっと読む)
1 - 20 / 22
[ Back to top ]