
Fターム[2C014DD11]の内容
Fターム[2C014DD11]に分類される特許
41 - 60 / 89
誘導装置
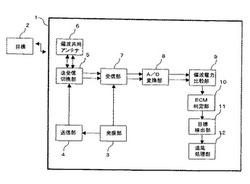
【課題】 従来の誘導装置は目標に向けて電波を送信して、目標から反射してきた信号を受信することにより目標信号を検出して追尾するが、目標信号以外に妨害機から送信されたECM信号を受信した場合には、ECM信号を目標信号であると誤認識し、目標ではなくECM信号を追尾することがあった。
【解決手段】 水平偏波及び垂直偏波を同時受信する偏波共用アンテナと偏波検出処理を有し、水平偏波及び垂直偏波の受信信号の電力レベルを比較することにより、誘導装置が目標信号を検出する際に目標からの反射信号とECM信号を識別して、安定して目標を追尾することを可能にするものである。
(もっと読む)
誘導装置

【課題】 自らは電波を放射せずにレーダなどの電波源からの電波を受信して、この受信信号に対して追尾する誘導装置において、継続的に電波を受信できるかどうかは電波源の挙動次第であり、目標が消失し追尾が継続できない場合がある。目標が消失した要因としては、電波源が周波数を変更し受信帯域幅外の周波数になった可能性や、レーダのスキャン周期の影響で受信電力が低下している可能性等が考えられるが、前者、後者を同時に捜索することが非常に困難である。
【解決手段】 SUM系受信帯域とDIF系受信帯域を別々に制御することで、異なる周波数帯域を同時に捜索することを可能とする。これにより、電波源からの電波放射状況の影響が軽減され捜索性能が向上するとともに、追尾時間が長くなることになるため、誘導性能の向上が可能となる。
(もっと読む)
飛翔体、飛翔体の飛翔方法及びコンピュータプログラム
【課題】目標の周りの電波の散乱強度が強い方向から、飛翔体をこの目標に接近させることが可能な飛翔体を提供する。
【解決手段】操舵装置12と、目標機2にて反射される電波の反射波を受信する受信部7と、この検波出力から目標機2を捕捉して追跡し、目標方向への測角信号を計算する目標検出器8と、慣性装置13と、飛翔位置及び飛翔速度と予め記憶した目標機2の初期位置及び初期速度とに基づき目標機2の位置及び速度を計算し飛翔体3と目標機2との会合点の方向に向かう飛翔経路を推定演算する方向推定器9と、誘導計算を行って操舵装置12に対する操舵信号を出力する誘導処理器11とを備え、方向推定器9は目標位置及び電波送信源1を含み地表に垂直な面A上で散乱波の散乱強度が強い方向に延びる直線Dを求め、直線Dと目標機2の位置とに基づき飛翔体3の通過点を算出し、誘導処理器11はこの通過点についての操舵信号を計算する。
(もっと読む)
複数波長レーザ誘導システムおよび複数波長レーザ誘導方法
【課題】目標への誘導を継続可能なレーザ誘導システムおよび方法を提供する。
【解決手段】目標Tにレーザ光を照射するレーザ照射装置1と、飛翔体Fに搭載され、レーザ光が照射される目標Tに向けて飛翔体Fを誘導する誘導装置2と、からなり、レーザ光の反射光に基づく目標Tの撮像によって飛翔体Fを目標Tの位置座標に向けて誘導する最中に目標Tの位置座標を検出出来なくなった場合に、レーザ照射装置1において照射するレーザ光の波長を切替え、この波長情報を無線信号によって誘導装置2へ送信する。そして、誘導装置2は目標Tの撮像に使用する反射光の波長を切替え、誘導処理を継続する複数波長レーザ誘導システム。
(もっと読む)
飛行体捕捉システムおよび飛行体捕捉方法
【課題】 従来よりも容易・迅速にステルス化された目標を捕捉し得る飛行体捕捉システムを提供することを目的とする
【解決手段】 本発明に係る飛行体捕捉システムは、飛行体が飛行することにより発生する飛行機雲を捕捉する飛行機雲レーダ装置と、飛行する飛行体を捕捉する捜索レーダ装置と、前記飛行機雲レーダ装置により飛行機雲が捕捉され、かつ前記捜索レーダ装置により飛行体が捕捉されない場合に前記飛行機雲を発生する飛行体がステルス飛行体であると判断するステルス飛行体判断装置とを具備することを特徴とする。
(もっと読む)
目標物探索装置および目標物探索方法ならびに飛翔体
【課題】飛翔体筐体の複数方向(例えば、上下方向あるいは左右方向)に光学窓を有する構成でありながら、正面前方の目標捕捉時に検知する画像情報が途切れることなく目標追尾を可能とする。
【解決手段】少なくとも第一および第二の光学窓22−1、22−2を備える光学窓部から入射する光から目標物を捜索および追尾する目標物探索装置10において、第一の光学窓22−1から入射する光を反射する第一の第1次反射鏡11−1と、第二の光学窓22−2から入射する光を反射する第二の第1次反射鏡11−2と、第一の第1次反射鏡11−1および第二の第1次反射鏡11−2の反射光をそれぞれ同一方向に反射する第2次反射鏡12と、第2次反射鏡12によって反射された光を1つの検知器13へ集光させる集光系である集光レンズ24と、を有する。
(もっと読む)
誘導装置
【課題】 ドップラレーダを使用して目標を観測する誘導装置は、目標信号のドップラ周波数とアンテナメインローブによるクラッタ周波数が重なる領域において、メインローブクラッタ信号を誤検出する可能性がある。このため目標信号がメインローブクラッタ周波数範囲外から出てくる待ち受け処理をするが、待ち受け処理中は目標もしくは誘導装置を搭載した飛しょう体自身が機動をし、ビーム領域外とならない限り目標信号を検出することができない。
【解決手段】 誘導装置のクラッタ実測値を使用してメインローブクラッタ電力と広がりを算出し、別途算出した目標信号電力とドップラ周波数を比較して目標の前方もしくは、後方のエネルギロスの少ない方へ誘導弾が回り込むよう、加速度指令値を計算する。
(もっと読む)
飛しょう体誘導システム
【課題】 パッシブ誘導を行う飛しょう体において、従来技術の誘導方式ではレーダーのメインビームに沿った非効率な誘導経路となったり、終末誘導が可能になった時点で所要誘導距離を確保できない可能性があった。
【解決手段】 母機2にコマンド送信装置12を、飛しょう体1にコマンド受信装置13を追加し、無線回線14により母機と目標物3の位置情報を送信する。この情報を用いれば、ミサイル1は、目標物3から放射されているレーダのメインビーム4の方向を推定可能となる。これにより、いつでも飛しょう体1をメインビーム上に誘導可能となるので、中期誘導まではロフトなどの効率的な軌道をとることができ、サイドローブを捉えて終末誘導を行う場合と比べて長い誘導距離を確保することも可能になる。
(もっと読む)
ジンバル機構及び赤外線誘導装置並びにジンバル機構の制御方法
【課題】迅速且つ正確に向きを制御できるジンバル機構及び赤外線誘導装置並びにジンバル機構の制御方法の提供。
【解決手段】ジンバル機構を、検知部2を第1の平面内の第1の軸で回動可能にする第1筐体5a、第1駆動部6a及び第1角度検出部7aと、第1筐体5aを第2の平面内の第2の軸で回動可能にする第2筐体5b、第2駆動部6b及び第2角度検出部7bと、第2筐体5bを第1の平面内の第3の軸で回動可能にする第3筐体5c、第3駆動部6c及び第3角度検出部7cと、第3筐体5cを第2の平面内の第4の軸で回動可能にする第4筐体5d、第4駆動部6d及び第4角度検出部7dとで構成し、第3駆動部6cで第2筐体5bを回動させる際に回転角のずれを打ち消すように検知部2を回動させ、第4駆動部6dで第3筐体5cを回動させる際に回転角のずれを打ち消すように第1筐体5aを回動させる。
(もっと読む)
誘導装置及び誘導システム
【課題】誘導に必要な十分な情報が得られない場合においても正確な誘導を行なう誘導装置及び誘導システムを提供する。
【解決手段】先行弾の誘導装置が撮像した飛しょうコースに関する情報を誘導装置制御装置に送信し、この誘導装置制御装置が飛しょうコースを修正して後続弾の誘導装置に送信する。このため、本実施形態の誘導装置及び誘導システムは先行弾の発射時に誘導に必要な十分な情報が得られない場合においても後続弾を正確に誘導することができる。
(もっと読む)
飛しょう体誘導装置
【課題】追跡目標が急激に進路を変更しても追跡を継続できる飛しょう体誘導装置提供する。
【解決手段】目視線変化率λ’の絶対値|λ’|が増加するとき有効航法定数N’を大きくして大きい旋回加速度を得る。また、目視線変化率λ’の絶対値|λ’|が減少するとき有効航法定数N’を小さくして比例航法を用いて飛しょう体を追跡目標に誘導する。目視線変化率λ’の絶対値|λ’|が増加するとき単調増加する非線形関数によって算出することもできる。
(もっと読む)
航法システム
【課題】計算能力の低い飛しょう体においても位置精度が非常に良いCPDGPS計算結果を利用できるようにするとともに、リアルタイムに飛しょう体の軌跡および到達ポイントを指令局側で正確に把握することが可能な航法システムを得る。
【解決手段】飛しょう体に搭載された航法装置1によるGPS受信機の観測データを、飛しょう体の監視および制御を行う指令局8へ送信し、指令局8側でGPS基準局11のデータと組み合わせてCPDGPS計算を実行する。その計算結果はテレメトリを通じて飛しょう体に再送信され、航法計算機によるGPSとINSの複合航法計算の自己位置計算の補正に使用する。また、この過程で、指令局8が飛しょう体の軌跡を精度良く把握することが可能となるため、ターゲット座標へ正確に誘導されたかどうかを把握することが可能になる。
(もっと読む)
飛しょう体誘導装置および飛しょう体
【課題】 旋回・蛇行・ダイブなどの高機動運動を行う目標に対して直線外挿により会合点を算出する場合、会合点が大きく変動し命中精度が悪化していた。また、飛しょう体弾体の運動エネルギー損失を抑制するために、高機動運動を行う目標に対して会合点が変動しないような低感度の追尾フィルタを用いた場合、イニシャルヘディングエラーが大きくなり、飛しょう体弾体を目標へ命中させるための速度ベクトルの修正量が大きくなり命中精度が悪化していた。
【解決手段】 飛しょう体弾体から目標までの相対距離等に基づき、2種類の追尾フィルタの出力を合成する。会合直前の高機動運動目標に対しては感度の高いフィルタ出力に近い平滑値を用いて誘導を行い、低機動運動の目標、あるいは会合まで時間が掛かる目標に対しては感度の低いフィルタ出力に近い平滑値を用いて誘導を行うようにした。
(もっと読む)
赤外線撮像装置を内蔵したタレットおよびこのタレットを備えた飛翔体
【課題】赤外線検出素子全体の受光温度環境に差が出ないようにして、全体として鮮明な画像が得られるようにした赤外線撮像装置を内蔵したタレットを得ること。
【解決手段】赤外線撮像装置を内蔵したタレット11は、基台13上に設置された赤外線撮像器16と、この赤外線撮像器16が回動自在に設けられるジンバル装置18と、赤外線撮像器16およびジンバル装置18の外側を覆うように設けられ、一部に形成された開口fから赤外光eを受光できるように設けられたケーシング15と、基台13上に設けられた断熱体14とを備える。断熱体14は、赤外線撮像器16が作動中において、赤外線撮像器16が基台13側からの放熱hを受けないように配置する。
(もっと読む)
飛しょう体の誘導装置
【課題】 飛しょう体が射程延伸航法を行う場合、射程延伸航法加速度指令として従来のように一定加速度指令を一定時間出力し、誘導加速度指令に加えて加速度指令とする方式では、発射時の発射装置の角度や風などの外乱の影響により姿勢角が変化した場合、飛しょう中の姿勢角が不安定になる可能性があった。
【解決手段】 射程延伸航法指令をトリガとして、飛しょう体の飛しょう時間と飛しょう体姿勢角と飛しょう体の規範姿勢角とを用いて射程延伸航法加速度指令を出力し、射程延伸航法加速度指令をもとに飛しょう体の姿勢角を制御する。補正された飛しょう体の姿勢角を検出し、それを前述の飛しょう体姿勢角として改めて入力することで、フィードバックにより飛しょう体の姿勢角を補正する。
(もっと読む)
飛しょう体誘導装置
【課題】 従来の誘導装置は目標に向けて電波を送信して、目標から直接反射してきた信号を受信することにより目標信号を検出して追尾するが、目標からの反射波が海面または地表面等のクラッタを経由した信号を受信した場合は、目標方向と異なる方向に目標がいると認識し、目標ではなくクラッタを追尾し、誤ロックすることがあった。
【解決手段】 従来は目標方向のみに電波を送信していたが、本方式では、目標方向及びクラッタ方向に角度を切換えながら電波を送信することで、目標方向及びクラッタ方向の2種類の受信信号を得ることができ、この2種類の受信信号を比較することでクラッタ信号を除去し、クラッタに誤ロックすることなく目標を正確な角度で追尾することが可能となる。
(もっと読む)
追尾装置
【課題】観測の初期段階から、観測誤差の少ない速度情報や加速度情報を得て、安定した目標機及び妨害機の追尾を行うことができる追尾装置を提供する。
【解決手段】入力された観測値に基づいて目標機及び妨害機の追尾処理を行う追尾装置であって、観測値が目標機と妨害機とのいずれに関する観測値であるかを判別する選択部21と、目標機が到達すると予測される位置を示す予測値と観測値とに基づき平滑値を算出して相関のある目標機に対する航跡情報を生成するフィルタリング処理部24aと、目標機の相関を判断する相関処理部25と、相関のある妨害機に対する航跡情報を生成するフィルタリング処理部24bと、妨害機の相関を判断する相関処理部22bと、相関のある目標機の航跡情報を観測値に対する妨害機の航跡情報の初期値に設定する初期化処理部25とを備える。
(もっと読む)
飛しょう体
【課題】従来の長射程用の飛しょう体は、通信距離及び地球曲面の制約により地上の通信装置と飛しょう体間で直接データリンクを行うことが困難であった。また、射撃の効果を判定するための情報を飛しょう体から地上装置へ伝送する際に、伝送周期が長く、かつ伝送遅延が発生し、正確に射撃の効果を判定できなかった。
【解決手段】誘導のためのコマンドや飛しょう体のステータス等を中継伝送するための中継装置と、目標と会合する状況を撮影するためのIR装置を備える。中継装置は、地上の通信装置からの電波の受信レベルが低下すると飛しょう体から自動的に分離され、パラシュートにより滞空し、飛しょう体と地上の通信装置間の中継伝送を行う。IR装置は目標との会合前に飛しょう体から自動的に分離し、目標と飛しょう体の会合前後の状況を撮影し、画像データを送信する。
(もっと読む)
スケーラブルな電子機器アーキテクチャ
隣接の段に物理的に結合され、隣接の段から物理的に切り離されるように適合されている複数の段と、その各段を制御するために単一の段上に配置されたプロセッサとを有する多段ミサイル。実例となる実施形態において、プロセッサは、フィールドプログラム可能ゲートアレイを含む。実例となる実施形態において、プロセッサは、4段式ミサイルの段4に配置され、各ステージに対する誘導およびナビゲーション機能と、段2、3および4に対する制御機能とを実行する。特定の実施形態において、ミサイルのそれぞれの段上の電子回路にプロセッサを結合するために、シリアルバスインターフェースが含まれている。ベストモードにおいて、インターフェースは、物理層インターフェースとリンク層インターフェースとを有するIEEE1394bインターフェースである。  (もっと読む)
(もっと読む)
誘導装置
【課題】 従来の誘導装置は目標に向けて電波を送信して、目標から直接反射してきた信号を受信することにより目標信号を検出して追尾するが、目標からの反射波が海面または地表面等のクラッタを経由したマルチパス信号を受信した場合は、目標方向と異なる方向に目標がいると認識し、目標ではなくクラッタまたはマルチパスを追尾し、誤ロックすることがあった。
【解決手段】 目標からの直接反射波はHH信号(水平偏波による送受信)とVV信号(垂直偏波による送受信)とで電力差がなく、マルチパス信号はHH信号とVV信号とで電力差が生じる。この電力差に基づき信号処理することにより、目標からの直接反射信号とマルチパス信号とを弁別し、弁別後の目標からの直接反射信号を用いて誘導処理を行う。
(もっと読む)
41 - 60 / 89
[ Back to top ]