
Fターム[2C014DD11]の内容
Fターム[2C014DD11]に分類される特許
61 - 80 / 89
赤外線検出装置
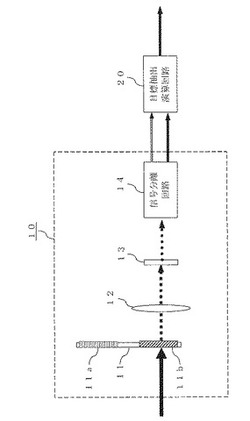
【課題】目標のロケットプルームからの赤外線放射と背景からの赤外線放射との弁別を容易にして目標の検出精度の向上を図る赤外線検出装置を得る。
【解決手段】目標のロケットプルームが放射する特徴的な分光赤外線放射特性に合致した透過特性を有する狭帯域赤外線透過フィルタ11bと、ロケットプルームの高温ガスの赤外線放射を透過する広帯域赤外線透過フィルタ11aとを有し、目標のロケットプルームから放射される赤外線に基づいて、狭帯域赤外線透過フィルタ11bを通過した後の狭帯域通過電気信号と、広帯域赤外線透過フィルタ11aを通過した後の広帯域通過電気信号とを分離生成する検出信号生成回路10と、検出信号生成回路10で分離生成された狭帯域通過電気信号と広帯域通過電気信号との差信号または積信号から目標抽出画像を生成する目標抽出演算回路20とを備える。
(もっと読む)
自律破壊ビークルによる多数の破壊ビークル(MKV)の迎撃装置

本発明は、大きな脅威範囲で動作するための自律管理能力および運動範囲を有する多数の破壊ビークル16を含んでいるMKV迎撃装置10を提供する。各KVはその固有のKV配備と指定されたマスターKVにより割当てられた決定されたターゲット体積に対するターゲット交戦を自己管理することができる。少なくとも1つのKVはミッションプランの分離後における更新を必要とせずに全てのKVの分離後を管理することができるマスターである。自律能力および増加された運動範囲はブースタのより効率的な使用と脅威のより効率的な交戦を行う。 (もっと読む)
滞空ミサイル迎撃システム
【課題】低空で飛来するミサイルをより確実に迎撃する滞空ミサイル迎撃システムを得る。
【解決手段】滞空体により地形や建造物等による影響を受けない上空に滞留し、電波センサ及び光波センサを用いて低空で飛来するミサイルを全周方向かつ比較的遠距離から探知し追尾する。加えて、迎撃ミサイルを回動式のパレットに複数格納し、迎撃ミサイルを発射する際は、所望する飛翔経路の方向に迅速に指向させて発射するとともに、多くの射撃機会を確保する。
(もっと読む)
誘導装置の動画像処理装置、誘導装置の目標追跡システム及び誘導装置の動画像処理装置における目標追跡方法
【課題】前回フレームにおいて追跡目標を含む複数の物体が結合した場合においても前回フレームの追跡目標のラベルと今回フレームの追跡目標のラベルとの対応関係を保持することができる誘導装置の動画像処理装置及び誘導装置の目標追跡システム及び誘導装置の動画像処理装置における目標追跡方法を提供する。
【解決手段】前回フレームの追跡目標のラベルを格納する前回追跡目標テーブルを設け、今回フレームの追跡目標のラベルに対応する前回フレームの追跡目標のラベルだけを今回フレームの追跡目標のラベルに対応付けてテーブルに格納する。
(もっと読む)
飛翔体誘導装置
【課題】飛翔体が最接近点から遠くても精度良く会合時間を計算することができ、更に、飛翔体が目標に再接近する前に目標形状を認識、目標半径を検出し、最接近点から遠くても精度よく直撃できるどうかを判定することのできる飛翔体誘導装置を提供する。
【解決手段】演算処理装置3が、飛翔体1の位置を基準とする相対座標系において、目標Tは等速直線運動するものとし、飛翔体1は等速加速度直線運動するものとして飛翔体1と目標Tとの会合点と会合時間を推定計算する。
(もっと読む)
飛しょう体の誘導装置
【課題】 飛しょう体の誘導装置において、目標に向けて電波を照射し捜索を開始する際に、内部の計算において海面および地面の反射電力(クラッタ電力)を一定として計算しているため、海面および地面の状況によってはクラッタ電力が少なく目標を探知する余裕が十分ある場合においても、捜索を開始せず目標の捜索を開始する距離が必要以上に短くなり、また、海面および地面の反射電力が大きい場合は目標捜索開始時に海面または地面に誤追尾してしまうという課題があった。
【解決手段】 誘導装置にクラッタ信号測定部を設け、実際に運用する環境下でのクラッタ電力を観測することにより、クラッタ電力計算部および捜索開始距離計算部で海面又は地面の状況に応じた捜索開始距離を算出することが可能とした。
(もっと読む)
誘導装置
【課題】 ドップラレーダを使用して目標を観測する誘導装置は、目標信号のドップラ周波数とメインローブクラッタのドップラ周波数が重なる領域では、メインローブクラッタ信号を誤検出する可能性がある。このため目標信号がメインローブクラッタ周波数範囲外に出てくる待ち受け処理をするが、待ち受け処理中は、目標又は誘導装置を搭載した飛しょう体が機動をしてビーム領域外とならない限り目標信号を検出できない。
【解決手段】 誘導装置のアンテナパターン及びクラッタ実測値を使用してメインローブクラッタ電力を算出し、別途算出した目標信号の電力と比較して、真に目標が検出困難なメインローブクラッタの角度範囲を算出する。これにより目標接近による目標信号電力の上昇及び実際のクラッタ状況に応じてメインローブクラッタ周波数範囲を狭くするものとした。
(もっと読む)
飛しょう体及び飛しょう体誘導方法
【課題】従来の飛しょう体は、誘導のためのコマンドや飛しょう体のステータス等の送受信を、地上の通信装置と飛しょう体間で直接データリンクを行っている。ただし、長射程の飛しょう体を誘導する場合、通信距離及び地球曲面の制約により地上の通信装置と飛しょう体間で直接データリンクを行うことが困難となる。
【解決手段】この発明に関わる飛しょう体は、誘導のためのコマンドや飛しょう体のステータス等を中継伝送するための中継装置を備えたものである。中継装置は、地上の通信装置からの電波の受信レベルが低下すると飛しょう体から自動的に分離され、パラシュートにより滞空し、飛しょう体と地上の通信装置間の中継伝送を行うことができる。
(もっと読む)
飛しょう体及び飛しょう体誘導システム
【課題】 地上や車両等に設置された誘導管制装置が、複数ある目標を弁別することが困難な状況であっても、複数の飛しょう体は、複数ある目標のそれぞれ異なる目標に向けて誘導される飛しょう体を得る。
【解決手段】 この発明による飛しょう体は、目標を捜索するシーカと、他の飛しょう体との間で捕捉した目標の位置や速度等の情報を相互に情報伝達する通信装置と、前記通信装置を経由して他の飛しょう体から受信した前記他の飛しょう体が捕捉した目標の位置及び速度等の目標情報に基づいて、捜索範囲に前記他の飛しょう体が捕捉した目標が含まれないように前記シーカの捜索範囲を設定する信号処理部とを備えるようにした。
(もっと読む)
飛翔体誘導システム及び飛翔体誘導方法
【課題】 通信負荷を低減して誘導制御の遅れを減少させ、誘導精度を向上させる。
【解決手段】 滞空型センサ2は、管轄エリア内の移動目標6を捜索捕捉し、捕捉した移動目標6の位置、速度等の目標情報を取得し、管制装置1からの射撃管制情報に基づいて誘導飛翔体4に会合目標を指示して最新の目標情報を継続的送信する。飛翔体発射装置3から発射された誘導飛翔体4は、滞空型センサ2から最新の目標情報を逐次受け取り、自身の飛行情報と合わせて対象目標に自身を会合目標に誘導する演算を行い、その演算結果に基づいて操舵制御することで対象目標に接近・会合する。このように、誘導飛翔体4に誘導情報を継続的に与える必要はなくして通信負荷を低減して誘導制御の遅れを減少させ、最新の目標情報により誘導演算を行えるようにして誘導精度を向上させる。
(もっと読む)
セミアクティブ方式の電波誘導装置
【課題】到来する移動物体に照射した電波の反射波を、ドップラ成分を用いて確実に分離、抽出し、安定した誘導制御を行うセミアクティブ方式の電波誘導装置を提供する。
【解決手段】リアアンテナ2で受けた目標照射波を利用したキャンセラ回路3〜6により、フロントアンテナのバックローブで受けた目標照射波の信号成分のキャンセル能力を向上しているため、飛しょう体が目標照射波のメインビーム内に有っても目標に関するドップラ成分を分離・抽出し、安定したセミアクティブ方式の電波誘導を行うことが可能となる。 また、上記キャンセラ回路を採用することにより、局部発振器が不要になり、小型軽量の飛しょう体に適した設計を行うことが可能となる。 また、モノパルスコンパレート機能をデジタル信号処理にて行うことにより、モノパルスコンパレータが不要になり小型軽量の飛しょう体に適した設計を行うことが可能となる。
(もっと読む)
誘導弾システム
【課題】 誘導弾システムとしての機動性を失うことなく、誘導弾に対して誘導指令を安定に伝達しながらこれを目標に誘導する誘導弾システムを得る。
【解決手段】 誘導弾システム1を構成する管制装置2及び複数の誘導弾3を、アドホック型の無線ネットワーク4に接続し、それぞれの機器がネットワーク内における中継経路を含めた通信経路情報を決定し更新する。そして、管制装置2と誘導弾3とが、互いに電波到達範囲外になるなど直接の通信が困難な場合にも、中継による通信経路を確保する。また、目標に最接近している誘導弾3aの取得した目標情報もこの無線ネットワーク4を経由して管制装置2や後続の誘導弾3等に確実に伝送し共有することによって、目標の状況変化にも良好に対処する。
(もっと読む)
飛しょう体の誘導装置
【課題】電波誘導において空間安定性能の良好な飛しょう体の誘導装置を提供すること。
【解決手段】所定の送信周期で電波を目標に向けて発射しその反射波を受信し、デジタルデータとして高速フーリエ変換し収集したデータを用いて計算して得た前記目標の誤差角と、慣性航法により求めた飛しょう体の姿勢角とから、目標への誘導を行う飛しょう体の誘導装置であって、前記収集するデータの送信周期に対するデータ取得時間の中心位置がデータ取得設定期間のほぼ中心位置になるように設定する。
(もっと読む)
目標追尾装置
【課題】早期に高精度な着弾位置の推定値を得るように、どのセンサがどの目標をいつからいつまで観測するかの効率のよいセンサの割当てスケジュールを決定する目標追尾装置を得る。
【解決手段】複数のセンサ4a〜4dにより複数の目標1a〜1dを観測し、この観測結果に基づき、追尾処理部5により追尾処理を行い、この追尾処理された追尾情報に基づいて軌道推定部7により目標の着弾までの軌道情報を推定し、次いで、この軌道情報に基づいて、要求精度算出部8により、満たすべき追尾精度要求を算出し、この算出された追尾精度要求を満足するように、どのセンサがどの目標をいつからいつまで観測するかの割当てスケジュール10を割当て部9により決定し、センサ制御部11がこの割当てスケジュール10どおりに複数のセンサ4a〜4dを制御するようにした。
(もっと読む)
誘導弾発射システムとその信号処理方法
【課題】目標への距離計測にかかる時間を短縮でき、目標位置を正確に計測できるようにした誘導弾発射システムを提供すること。
【解決手段】1つの誘導弾においてパルス繰り返し周期と目標検出ゲートの位置とを切り替えるのではなく、パルス繰り返し周期と目標検出ゲートの位置とを互いに異ならせた複数の誘導弾を用い、各誘導弾により得られた目標情報を用いて目標までの距離を測るようにする。これにより、HPRF方式を用いる場合においてパルス繰り返し周期と目標検出ゲートの位置とを切り替える回数を減らすことができ、最短で1回で目標位置を求めることができる。このことから誘導弾と目標との距離を速く、正確に計測することができるようになり、目標への距離計測にかかる時間を短縮して目標位置を正確に計測できるようになる。従って射撃統制装置が機能しない場合においても、自律的な迎撃処理を迅速かつ確実に実行することが可能になる。
(もっと読む)
誘導弾
【課題】移動していない目標に対しても誘導精度を劣化させないで誘導できる誘導弾。
【解決手段】アンテナ13からの送信波の反射波を該アンテナで受信する受信機14と、受信した信号に基づき目標を検出して目標信号を出力する目標検出部15と、目標信号に基づき推定した推定位置信号を出力する追随制御部16と、外部から与えられた目標の推定位置情報にしたがって略鉛直方向から目標に接近するように誘導弾を誘導し、誘導弾の機軸が鉛直方向になった後は、追随制御部からの推定位置信号に基づき誘導弾を誘導する誘導制御部17とを備えた電波誘導装置1を搭載した誘導弾であって、追随制御部は、誘導弾の機軸が鉛直方向になった後に、地表までを測距して得られた測距値に基づき目標の捕捉範囲を設定し、目標検出部は、追随制御部で設定された捕捉範囲内で目標を検出して目標信号を出力する。
(もっと読む)
飛翔体のレーザ誘導装置
【課題】従来の飛翔体のレーザ誘導装置では、太陽光などによるジャミングに感応し易いという問題点があった。
【解決手段】目標Tに照射したレーザ光LTの反射光LRを受信して飛翔体Fを誘導する装置であって、所定の基準時間に基づいてレーザ光LTをパルス状に送信する光送信手段1と、飛翔体Fにおいて被検出光(LR)を受信する光受信手段2を備え、光受信手段2が、光送信手段1と共通の基準時間に基づいて動作制御されると共に、光送信手段1のレーザ光の送信タイミングに対応して反射光LRの信号検出を間欠的に行う手段であり、レーザ光LTのパルス状の送信タイミングと反射光LRの間欠的な信号検出タイミングを同期化することで、ジャミングを受け難いものにして誘導機能の向上を実現した。
(もっと読む)
赤外線誘導装置
【課題】高温の目標物の特徴を容易に抽出することができ、かつ、小型化、軽量化、信頼性の向上を図ることができる赤外線誘導装置の提供。
【解決手段】集光光学系4や検知器5を固定する筐体自体の角度を変えるのではなく、集光光学系4の前段に、視野を拡大するための1又は複数のウェッジプリズム3aや偏心レンズ3cと、高温の目標物からの放射率が大きい特定の波長帯を選択的に透過させる1又は複数のフィルタ3bとを含む入射光学系3を配置し、この入射光学系3、又は、入射光学系3及び集光光学系4のみを検知器5の光軸に対して略直交する面内で回転させる。これにより、高温の目標物の特徴を容易に抽出することができ、高温の目標物の検知性能を向上させることができると共に、ジンバル機構を用いる構造に比べて赤外線誘導装置1の小型化及び軽量化、信頼性の向上を実現することができる。
(もっと読む)
既存のミサイルシステムに対する性能向上された新型熱センサ
第1のアレイ20、60を第2のアレイ22、62にマップする方法は、(1)各アレイが連続した列および行中に画素を有し、第1のアレイが画素の各行を識別する連続した整数を有し、(2)連続した整数が画素の各列を識別し、1つの数値が各画素と関連しており、(3)第1および第2のアレイがその第1および第2のアレイの列の間で1対1の対を有し(あるいは、有するようにされることができ)、および(4)第1のアレイの同じ列中の4つの特有の画素のグループが第2のアレイの対にされた列中の1つの画素と1対1の対にされている場合に有用である。この方法は、第1のアレイ中の各列に対して4つの特有の画素の1つの奇数グループを形成するために連続した奇数番号を付けられた4個の行の中の画素と関連した値を選択し、奇数組合せ値を形成するためにこの奇数グループの奇数番号の最初の3行の中の画素と関連した値を組合せ、この奇数組合せ値をその奇数グループが対にされている第2のアレイの列および行の中の画素にマップし、その後、4つの特有の画素の1つの偶数グループを形成するために偶数番号を付けられた4個の行の中の画素と関連した値を選択し、偶数組合せ値を形成するためにこの偶数グループの最後の3個の行の中の画素と関連した値を組合せ、この偶数組合せ値をその偶数グループが対にされている第2のアレイの列および行の中の画素にマップするステップを含んでいる。  (もっと読む)
(もっと読む)
飛しょう体誘導装置
【課題】 旋回、ジンギング、ダイブなど高機動運動目標を誘導する場合、又は目標のベクトルから直線外挿により会合点を算出する場合、会合点が大きく振れ、飛しょう体速度を低下させ命中精度が悪化していた。また飛しょう体速度低下を防止するため、高機動運動目標に会合点が振れない様な追尾フィルタを用いた場合、飛しょう体が目標に対して終末誘導をする際のイニシャルヘディングエラーが大きくなり命中精度を悪化させていた。
【解決手段】 イニシャルヘディングエラー等の推定値に基づき、2種類の追尾フィルタを使い分けることにより、会合直前の高機動運動目標に対しては高感度の追尾フィルタを用い、イニシャルヘディングエラーの少ない誘導を行い、低機動運動の目標、または会合まで時間が掛かる目標に対しては低感度の追尾フィルタによる飛しょう体速度低下の少ない誘導を行う様にした。
(もっと読む)
61 - 80 / 89
[ Back to top ]