
Fターム[2C150DA05]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 全体が移動する (857) | 歩行するもの (190) | 数対の足によるもの (31)
Fターム[2C150DA05]に分類される特許
21 - 31 / 31
模型体駆動装置、駆動体および模型体
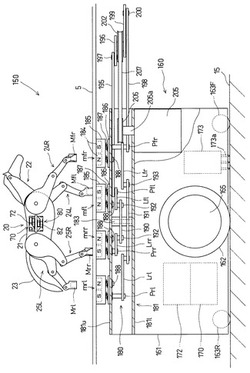
【課題】駆動体と仕切板により隔てられた模型体の脚部の蹴り上げや振り上げを実現した模型体駆動装置、駆動体および模型体を供する。
【解決手段】仕切板5上で複数の脚部により本体を支える模型体20が、仕切板5を隔てた下方に配設された駆動体160の駆動に従動して動作する模型体駆動装置150において、模型体20は、複数の脚部が各々前後に揺動可能で、複数の脚部の各足端部にそれぞれ磁石Mfl,Mfr,Mrl,Mrrが一方の磁極を足裏に向けて設けられ、駆動体160は、互いに異極を上方に向けた1対の磁石を仕切板5の下面に沿って前後に近接して配列した複数組の磁石対mfl,mfr,mrl,mrrが上方の模型体の複数の脚部の各足端部にそれぞれ対応して走行方向に往復動自在に設けられ、往復駆動機構180により複数組の磁石対mfl,mfr,mrl,mrrを同時に前後に往復動させることで、模型体20の複数の脚部の各足端部の永久磁石Mfl,Mfr,Mrl,Mrrに磁力を働かせて複数の脚部をそれぞれ揺動させる模型体駆動装置、駆動体および模型体。
(もっと読む)
ペット型ロボット

【課題】安価で広範な種類の四足動物を模したペット型ロボットを楽しむことができる外皮被着構造を備えたペット型ロボットを提供する。
【解決手段】ロボット本体1は、四足動物の体型を模した共通の筐体f1を有している。被覆体2は、ロボット本体1に着脱自在に被覆し、各四足動物を模した容姿が個別に異なっている。ロボット本体1は、胴体部3と、胴体部3に取り付けられる頭部4と、胴体部3に取り付けられ、少なくとも歩行可能な複数の可動脚5a〜5dと、を備えている。
(もっと読む)
回転運動によって移動する歩行装置
【課題】 地表の凹凸を越えことが容易であってかつ機構が簡単な歩行装置を提供する。
【解決手段】 歩行装置は車体6から垂下した固定枠5と、その固定枠に回転用クランク1と脚保持用クランク2による平行クランク機構によって連結された脚3,4とから構成される。脚3,4は4組設けることで4足歩行装置を構成する。回転用クランク1を固定枠5に対して回転させると脚3,4が平行運動を行い、着地した脚を支点として、着地していない脚が持ち上げられつつ前進する。
(もっと読む)
ポータブルデバイス
【課題】
【解決手段】ポータブルデバイスは、振動を提供するモータ、このモータに動力を供給する動力源、前記モータの方向を制御するスイッチデバイス、面に係合してモータが振動するときにデバイスを推進する推進手段であって、垂直方向に対して角度を成して下方に延在する推進手段、及び前記スイッチデバイスに接続されている入力デバイスを具え、前記スイッチデバイスは入力デバイスが所定の信号を受信すると前記モータの方向を切りかえるように構成されている。有利なことに、推進手段は一セットの毛を具える。角度を付けた毛を使用することで、後方向の摩擦が増加し、振動したときに前記デバイスを前方へ動かす。振動が物体を後方へ移動させようとすると、この毛が面に食い込み、振動が物体を前方へ移動させようとすると、毛が面上を摺動する。
(もっと読む)
脚式歩行ロボット並びにその静的バランス制御方法
【課題】 静的バランスのくずれを、チューニング等の煩雑な分解作業を行うことなく、外部からの簡単な操作で調整して修正することのできる脚式歩行ロボット、並びに脚式歩行ロボットの静的バランス制御方法をを提供する。
【解決手段】 ロボット外表面を覆う柔軟なウェア4に、流体を充填することが可能な多数の密室空洞部5を設けて、選択した密室空洞部に充填する流体の量を加減することによりロボットの静的バランスを制御するようにした脚式歩行ロボット並びにその静的バランス制御方法の構成。
(もっと読む)
走行玩具
【課題】 左右の脚の位相差を変えることができる走行玩具を提供すること。
【解決手段】 モータ動力でもって左右の脚を前後に揺動動作させて走行する走行玩具において、正逆回転可能なモータと、前記モータが一方向に回転した際に前記左右の脚を第1の位相差をもって揺動動作させるための第1のクラッチ機構と、前記モータが他方向に回転した際に前記左右の脚を第2の位相差をもって前記第1のクラッチ機構におけると同じ運足方向に揺動動作させるための第2のクラッチ機構と、前記第1のクラッチ機構と前記第2のクラッチ機構とを前記モータの回転方向に応じて選択的に作動させるクラッチ切換機構とを備えることを特徴とする。
(もっと読む)
動く玩具付筆記具
【課題】本発明は、簡略操作にて長期にわたって支障なく動く玩具の筆記具頂部に対する着脱を繰り返すことができ、且つ、興趣に溢れた動く玩具付筆記具を提供する。
【解決手段】本発明の動く玩具付筆記具は、筆記部1を先端から出没させる構成の筆記具本体2と、載置面上を二足で歩行移動するゼンマイ駆動又は電動駆動の手振り式の二足移動玩具20と、筆記具本体2の頂部、二足移動玩具20の底部間にわたって設けたスライド嵌合式又はネジ込み式の着脱機構部とを有し、着脱機構部により筆記具本体2に二足移動玩具20を装着した状態と、筆記具本体2から二足移動玩具20を離脱させた状態との2種の形態をとり得るようにしたものである。
(もっと読む)
走行玩具
【課題】モータ動力でもって左右の脚を前後に揺動動作させて走行し、切替によって直進や旋回が可能な走行玩具を提供すること。
【解決手段】後側左右に第1の脚が設けられ、第1のモータは別個の遊星歯車機構を介して左右の第1の脚に連結され、遊星歯車機構の各々は太陽歯車、遊星歯車、遊星キャリア及び内歯歯車から構成され、第1のモータの動力による遊星キャリアの各々の回転によって左右の第1の脚が前後に揺動するように構成され、後側の左右には第2の脚が設けられ、遊星キャリアの各々はそれぞれ別個の動力伝達機構を介して左右の第2の脚に連結され、遊星キャリアの各々の回転によって左右の第2の脚が前後に揺動するように構成され、第2のモータは歯車機構を介して一方の内歯歯車と連結され、第2のモータの動力によるその内歯歯車の回転によって左右の脚の相対位置を変更可能となるように構成されている。
(もっと読む)
歩行ロボット
【課題】 本体部の支持または歩行において冗長となる関節部に対して、関節軸を回動するアクチュエータの小型化、軽量化を図り、かつ本体部を支持していない状態では関節部を自由に回動できる歩行ロボットを得ることを目的とする。
また、本体部の支持及び歩行時に、冗長となる関節部のアクチュエータでの、消費電力の低減が可能な歩行ロボットを得ることを目的とする。
【解決手段】 この発明に係る歩行ロボットは、その脚部に回動可能な関節部を備え、関節部には関節軸201と、関節軸201を回動させるためのモータ205とを備えている。そして、脚部の床面への接地に連動して関節軸201の回動を規制する規制手段(プッシュロッド210、ロックピン212、213等)を備えている。
(もっと読む)
ロボットシステム及びロボット装置の制御方法
【課題】本発明は、より一層エンターテインメント性を向上させることを目的とする。
【解決手段】複数のロボット装置が自律的に行動するロボットシステムにおいて、各ロボット装置は無線通信手段を有し、ロボット装置同士で会話する際、当該会話の内容をコマンド及び又はセマンティクスとして双方の無線通信手段を介してロボット装置に送受信するようにした。
(もっと読む)
会話処理装置および方法、並びに記録媒体
【課題】 ユーザに楽しく自然な会話を提供する。
【解決手段】 ロボット1のプロファイルメモリ121には、ユーザの趣向に関するデータ(プロファイルデータ)が記憶されている。サーバ101の話題データベース110には、話題となる情報が記憶されており、その情報は、ロボット1に対してインターネットなどを介して提供される。ロボット1は、提供された情報のうち、プロファイルメモリ121に記憶されているプロファイルデータをフィルタとし、フィルタ112Bによりフィルタリングした結果、残った情報のみが、話題メモリ76に記憶される。話題メモリ76に記憶されている情報は、ユーザと会話している時に用いられる。
(もっと読む)
21 - 31 / 31
[ Back to top ]