
Fターム[2C150ED01]の内容
Fターム[2C150ED01]の下位に属するFターム
Fターム[2C150ED01]に分類される特許
1 - 10 / 10
ロボット、ロボット制御方法およびプログラム
【課題】姿勢に応じて、違和感のない自然な音声を出力する。
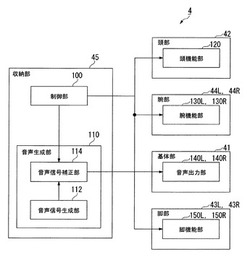
【解決手段】ロボット4は、基体(基体41)に可動連結した可動部(例えば、頭部42)の駆動を制御する駆動制御手段(制御部100)と、音声を生成する音声生成手段(音声生成部110)と、前記音声生成手段において生成された音声を出力する音声出力手段(音声出力部140L、140R)とを有し、前記音声生成手段は、前記駆動制御手段によって制御される前記可動部の前記基体に対する姿勢に基づいて、生成する音声を補正する。
(もっと読む)
ラジオコントロール送信機、ラジオコントロール送信機における通信方法

【課題】模型用のラジオコントロールシステムのトレーナ機能の利用にあたり、トレーナ信号受信機やトレーナケーブルを使用することなく、先生用と生徒用のラジオコントロール送信機との間での無線通信によってトレーナ信号が送受信できるようにする。
【解決手段】操縦信号の送信に2.4GHz帯での周波数ホッピング方式を採用する。そのうえで、トレーナモード時には、先生用ラジオコントロール送信機は、周波数が切り換えられるフレーム期間ごとに、操縦信号の送信とトレーナ信号の受信を実行する。生徒用ラジオコントロール送信機も、周波数が切り換えられるフレーム期間ごとに、トレーナ信号の送信を実行する。
(もっと読む)
ラジオコントロール送信機、ラジオコントロール送信機における操縦信号の送信方法
【課題】模型用のラジオコントロールシステムのトレーナ機能の利用にあたり、先生用ラジオコントロール送信機と生徒用ラジオコントロール送信機とでのチャンネルオーダーの相違による不具合をユーザの負担にならないようにして解消する。
【解決手段】先生用ラジオコントロール送信機のチャンネルに、同じコントロール対象が割り当てられている生徒用ラジオコントロール送信機1Bのチャンネルを対応付ける操作を行ってチャンネル対応データを作成し、これを先生用ラジオコントロール送信機に保持させる。先生用ラジオコントロール送信機は受信したトレーナ信号のチャンネルを、チャンネル対応データに従って変換して操縦信号を生成、送信する。
(もっと読む)
ジュークボックス玩具
【課題】音楽を純粋に楽しむことができるとともに視覚的にも楽しむことができ、団塊の世代の大人が若い頃を思い出して心を癒すことができるジュークボックス玩具を提供すること。
【解決手段】ディスク5を着脱可能に保持したディスクホルダー6と、ディスクホルダー6に保持されたディスク5をピックアップし、ターンテーブル8に移動させるピックアップアーム7と、ターンテーブル8上に移動するアーム9とを設けるとともに、上記ディスクホルダー6、ピックアップアーム7、アーム9をそれぞれ駆動する駆動機構D1、D2、D3を設け、該駆動機構D1、D2、D3は制御部100によって制御され、音楽が再生される前にディスク5をピックアップアーム7でピックアップしてターンテーブル8上に移動させた後、アーム9をディスク5の上方に移動させ、音楽の再生が終わると、ディスク5をターンテーブル8からディスクホルダー6に戻すようにした。
(もっと読む)
自動車玩具
【課題】簡単な構造で効果的に車体への衝撃を緩和できる自動車玩具を提供する。
【解決手段】前輪用シャーシ22と後輪用シャーシ32とは、車幅方向に延在する回動軸44を中心に回動可能に連結され、前輪用シャーシ22と後輪用シャーシ32との間には、前輪20と後輪30とを接地させる方向に付勢する捻りばね43が設けられている。
(もっと読む)
自動車玩具
【課題】起伏の大きい路面走行の場合でも前輪及び後輪の接地性の良い自動車玩具を提供する。
【解決手段】前輪用シャーシ22と後輪用シャーシ32とは、車幅方向に延在する回動軸44を中心に回動可能に連結され、回動によって、前輪20及び後輪30を該前輪用シャーシ22及び該後輪用シャーシ32の下面側で近接させる屈曲状態と該前輪20及び該後輪30を該前輪用シャーシ22及び該後輪用シャーシ32の下面側で離間させる伸張状態とを取り得るように構成され、前輪用シャーシ22と後輪用シャーシ32とには、伸張状態側から近接状態側に向けて付勢し、常態で、屈曲状態に保持する捻りばね43が設けられている。
(もっと読む)
飛行玩具
【課題】 任意のキャラクターを有するモデルの飛行体を、遠隔操縦により自由に上昇下降及びホバリングができる飛行玩具を提供する。
【解決手段】 キャラクターを有するモデルを模した飛行体11と、この飛行体11の上部に設けられ同軸芯で互いに反対方向に回転する上部ローター16及び下部ローター28と、少なくとも前記一方のローターと連動して回転する姿勢を安定に保つためのスタビライザー20と、前記飛行体11の内部に設けられ前記上部ローター16及び下部ローター28並びにスタビライザー20を回転させる駆動部31と、前記飛行体11の内部に設けられ前記駆動部31の動作を制御する遠隔操縦用の制御回路43及び電源となるバッテリー44とを備える。
(もっと読む)
脚式ロボットとその制御方法ならびに歩容データの作成装置と作成方法
【課題】 脚式ロボットが、脚リンク群(特に接地脚)を伸ばしながら歩行することを可能とする技術を提供する。
【解決手段】 脚式ロボットは、体幹と、基端が体幹に揺動可能に連結されており、先端に足先を備えている複数の脚リンクと、事前に準備されている歩容データを、実際の歩行状態に基づいて補正する手段と、脚リンク毎に、補正した歩容データの体幹目標位置に基づいて基端位置を特定する手段と、脚リンク毎に、特定した基端位置を鉛直方向に移動したときに補正した歩容データの足先目標位置からの距離が所定距離となるときの鉛直移動量を計算する手段と、脚リンク毎に計算した鉛直移動量から鉛直下方に最大の移動量を選択する手段と、補正した歩容データの体幹目標位置の鉛直座標を選択手段で選択した鉛直移動量だけ鉛直方向に修正する手段とを備える。
(もっと読む)
ロボットの動作計画方法
【課題】 本発明の目的は、ロボットの初期姿勢から最終姿勢までの安定した動作を計画することのできるロボットの動作計画方法を提供することにある。
【解決手段】 本発明のロボットの動作計画方法は、ロボットの初期及び最終姿勢に基づいて、初期姿勢と最終姿勢とをつなぐ動作を確率を用いて計画するもので、重力によってロボット各部に作用する複数のモーメントの釣合条件に基づいて、動作中のある時点での停止状態でロボットが転倒するか否かを静的に判定する静的転倒判定工程と、静的転倒判定工程において、ロボットが動作の間に静的に転倒しないと判定された場合に、重力及び動作による慣性力によって該ロボットに作用する複数のモーメントのつり合い条件を考慮して動作中にロボットが転倒しないと動的に判定されるように、該ロボット各部の速度及び/又は加速度を設定する速度/加速度変更工程とを備えていることを特徴としている。
(もっと読む)
人間型ロボットの制御装置
【課題】 物体を押しながら安定して歩容することができる人間型ロボットの制御装置を提供する。
【解決手段】 床に置かれた対象物を継続的に押す人間型ロボットの制御装置において、両脚が地面に着いた両脚支持期に対象物を押し、片脚のみが地面についた片脚支持期では対象物を押さない制御を行う制御手段を備える。また、床に置かれた対象物を継続的に押す人間型ロボットの制御装置において、両足が地面に着いた両脚支持期に手先反力を制御することにより対象物を押し、片足のみが地面に着いた片脚支持期では対象物を押すことなく、先に対象物を押した量だけステップする制御を行う。
(もっと読む)
1 - 10 / 10
[ Back to top ]