
Fターム[2C150ED02]の内容
Fターム[2C150ED02]の下位に属するFターム
Fターム[2C150ED02]に分類される特許
1 - 20 / 43
モータ制御回路及び該回路を実装したサーボ装置
【課題】モータ駆動制御用の駆動周波数を任意に変更して所望の操作感覚でサーボ装置を操縦すること。
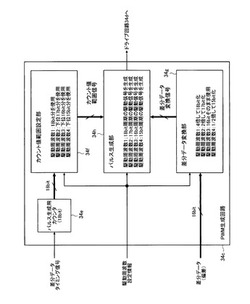
【解決手段】受信機20を介して送信機10から制御信号として周波数設定信号を受信すると、予め記憶した駆動周波数設定情報のうち、受信した周波数設定信号に応じた情報を選択する。また、送信機10から制御信号である操縦信号を入力すると、選択された駆動周波数設定情報に基づき、パルス幅比較部34bから差分データタイミング信号に同期して取り込んだ差分データ信号を、選択された駆動周波数に対応するように周波数変換処理する。そして、得られた差分データ変換信号を周波数処理情報に基づき所定のカウント範囲まで使用して駆動信号を生成し、駆動機構32の駆動制御を行う。
(もっと読む)
サーボ装置及び該装置を備えた遠隔操作装置

【課題】サーボ装置の応答特性の設定を送信機から容易に行うこと。
【解決手段】送信機10からの制御信号を受信し、この制御信号を予め記憶部35に記憶された特性データに応じて、モータ制御部34で駆動信号に変換して駆動機構32を駆動制御する制御部31を備えたサーボ装置30において、制御部31は、制御信号が操縦信号か特性データ信号かを判別する信号処理部33と、制御信号が特性データ信号であると判断したときは、受信した特性データ信号に基づき特性データが更新記憶される記憶部35とを備えた。
(もっと読む)
ロボット制御システム及びロボット制御方法
【課題】複数台のロボットを集団で連携動作させるロボットシステムにおいて、1台以上のロボットに遅延または進みが生じた場合に、そのロボットにできるだけ見た目に違和感を生じさせることなくモーションの修正を行わせることができるようにする。
【解決手段】ロボット(11、12、13)のモーションについて遅延又は進み状況を監視し、該監視結果に基づいて複数のロボットを集団で連携動作するように制御するロボット制御システムであり、各ロボットは、前記監視結果を用いて自機のモーションの遅延又は進み状況を把握する遅延状況把握部(1)と、遅延状況把握部で把握された遅延または進み状況からモーション修正の可否を決定する修正可否決定部(2)と、前記修正が決定されると、取り得るモーションの選択と評価を行いながら最も評価の高いモーションを取り繕いモーションとして決定する取り繕いモーション決定部(3)と、決定した取り繕いモーションを受けて自機の修正モーションを再生する修正モーション再生部(4)と、を含む。
(もっと読む)
動作玩具
【課題】動作制御を行うためのパターンを玩具のデザイン性を損なうことなく自然に配置するとともに、移動体の移動速度に応じて動作制御を変化させ、バリエーション豊かな動作を楽しむことのできる動作玩具を提供する。
【解決手段】経路上に、形象物パターン又は光センサ206のうちの一方が設けられ、自動車模型20に、形象物パターン又は光センサ206のうちの他方が設けられており、制御装置210は、光センサ206によって検知された外部刺激から形象物パターンを検出し、この形象物パターンと光センサ206が外部刺激を検知した速度とに応じて、自動車模型20、又は経路若しくはその近傍に設けられた構造物のうちの少なくともいずれか1つの動作を制御する。
(もっと読む)
脚式移動ロボット
【課題】駆動制御性の良好な膝関節角を増加させることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上腿リンク32と下腿リンク34を連結する膝関節16とを有する脚体2を備える。膝関節16は、一端が下腿リンク34の軸40に対して回転自在に連結され、他端が上腿リンク32の軸42に回転自在に連結される連結ロッド44と、下腿リンク34の軸60と上腿リンク32の軸56との間の距離を、電動モータ40による駆動力により変化させる距離変動機構50とを備える。膝関節16の屈曲角が0度のとき、軸40と軸42との間の距離と軸60と軸56との間の距離との和が、軸40と軸56との間の距離よりも小さい。
(もっと読む)
教育教材用ロボット
【課題】逐次制御から自動制御に切り替わる際のロボットの動作自由度を確保できる教育教材用ロボットを提供する。
【解決手段】本発明の教育教材用ロボットは、電気的な制御信号による逐次制御および実行オブジェクトであるプログラムによる自動制御の少なくとも一方に基づいて動作するロボットと、ロボットに制御信号を与える制御装置と、制御装置とロボットとを接続すると共に制御信号を電気的にやり取りする制御ケーブルと、を備え、制御装置は、逐次制御から自動制御に切り替える切り替え信号を、ロボットに出力可能であり、制御ケーブルは、切り替え信号に基づいて、ロボットに対する拘束力を弱める。
(もっと読む)
遠隔操作される玩具車両
走行路上を走行する、遠隔操作される玩具車両(1)は、駆動モーターと、操縦可能な車輪とを備えている。現実のカーレースをよりよくシミュレートできるように、遠隔操作される玩具車両(1)は、走行路の特性を認識するためのセンサー部(4)と、この認識された走行路の特性に応じて、玩具車両(1)の特性を調整するための制御部とを備えている。 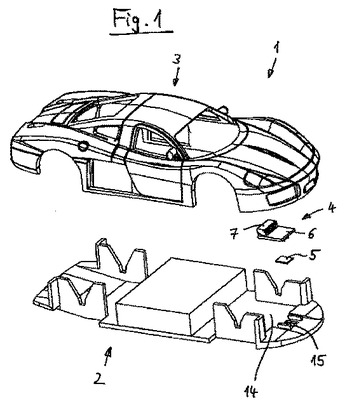 (もっと読む)
(もっと読む)
毛状体で移動する教材用ロボット
【課題】
ロボット教材を使用した教育においては児童の興味をそそる事が重要であり、
タイヤを使った駆動方式では、動きが単調な動きとなり、利用者の興味を引きにくいと言った問題がある。
ロボット教材のプログラミングにおいて、パーソナルコンピューターなどのプログラミング装置が必要になり、ものづくり教室などの運営に必要な設備が多くなり運営の必要経費が高くなる。
【解決手段】
複数の毛状体推進装置を使用して移動することでユーモアがある動きができる教材用自走ロボットを作成した。
本発明は手書きが可能な二次元バーコードの書式と、教材用自走ロボット自体にバーコードリーダーを搭載することで、パーソナルコンピューターなどを使用しなくても、教材用自走ロボット本体だけでプログラミングを行う事を可能とした。
(もっと読む)
競走玩具
【課題】物足りなさや興趣性の欠如を解消して、従来よりも飽きることなく長く楽しめるようにすること。
【解決手段】自走するための駆動機構12を有する走行体1,2を備え、この走行体を自走させて速さの優劣を競う競走玩具100において、走行体の走行能力に関する複数の走行制御信号を記憶する信号記憶手段34と、信号記憶手段に記憶された走行制御信号の中の一つをランダムに選択する選択制御手段40と、を備え、走行体は、選択制御手段により選択された走行制御信号により、走行体の走行能力を上昇又は下降させる走行制御手段16を備える。
(もっと読む)
回転翼無人機用のナビゲーション電子カード支持体
本支持体300は、機械的振動を吸収する材料によって形成される機械的インターフェース310を介して、無人機内に設けられているハウジング内に固定されるように設計されている。環状形状の機械的インターフェースは、ハウジング内に設けられている対応する環状肩部上にフィットするように設計されている。ハウジング内のホルダーの固定部301は、少なくとも1つの接続支柱302がナビゲーション電子カード320を支持しているとともに該固定部の一端に自由に取り付けられている状態で、機械的インターフェース310を支持する。無人機用の電源バッテリー400もホルダー内に収納される。ナビゲーション電子カードは特に、無人機の重心に位置決めされるように該カードに配置される、加速度計のようなナビゲーションセンサー321を含むことができる。 (もっと読む)
移動玩具
【課題】発光素子による効果的な光演出を実現できる移動玩具の提供。
【解決手段】移動玩具10は、ボディ12と、ボディ12に搭載され、移動玩具10を移動させる原動機と、少なくとも1つの発光素子LEDb〜LEDdと、発光素子LEDb〜LEDdを駆動して発光を制御する発光素子駆動部を含む。ボディ12の少なくとも一部に対して、背景領域BRb〜BRdと背景領域BRb〜BRdとは光透過特性が異なる模様領域TRb〜TRdとを有する光演出領域LRb〜LRdが設定される。発光素子LEDb〜LEDdはボディ12の裏側から光演出領域LRb〜LRdに向けて光を照射する。
(もっと読む)
鉄道模型の自動運転装置並びに鉄道模型の2列車自動運転方法及び2列車追突防止自動運転方法。
【課題】
列車の動力車に特別の細工をしないで二列車の定速の自動運転や2列車を同方向へ走行させた場合に自動追突防止可能な運転方法を提案する。
【解決手段】
Nゲージのような鉄道模型の動力車と全線路を複数のセクションに分割して夫々絶縁処理した線路とを使用し、動力車の走行・停止にかかわらず線路のどのセクションにあるかを検出して速度情報を検出する等の処理をマイコン部と制御情報をマイコン部に転送するパソコン部とで構成した装置で、自動運転をしたり、自動停止をしたり、2列車同方向への運転時に追突を防止して様々な高度の自動運転を可能にした。
(もっと読む)
模型回転翼航空機の回転翼、及びその回転翼の製造方法
【課題】模型回転翼航空機に適用可能であり、実機により近いリアル性を有する回転翼、及びその回転翼の製造方法を提供する。
【解決手段】円筒状で所望の長さのアルミ合金管10を、ロール成形により、断面が翼断面形になるように成形する。これにより、模型回転翼航空機用の回転翼5aを中空構造に構成することができる。このため、回転翼5aは、重量が大幅に低減されたものとなる。そのような回転翼5aによれば、アルミ合金特有(金属特有)の重量感や重厚感をかもし出しつつ、金属素材につきまとう重量の問題も回避できる。しかも、回転翼5aは、アルミ合金管10を成形することで一層構造(一体構造)となり、強度も充分なものとなる。
(もっと読む)
シャボン玉作成装置
【課題】 径の大きなシャボン玉を間欠的に作成し、且つ、作成したシャボン玉を空中に浮遊させるシャボン玉作成装置を提供する。
【解決手段】 シャボン玉作成装置1は、複数の膜形成部44と複数の通風部45が周方向に交互に配置された回転体41と、回転体41を回転駆動する駆動機構31と、送風口65が回転体41の内側であって上向きに位置するように配置された送風機構35と、シャボン液入れ容器33と、上方に噴出口を有した外殻と、を備え、回転体41の回転に伴い、下方に来た膜形成部44に設けられた膜形成穴がシャボン液に浸漬され、シャボン液に浸漬された膜形成穴が送風口65と外殻の噴出口との間に達したとき、送風機構の送風口65から噴出される一定の空気の流れにより膜形成穴44aで径が大きく少量のシャボン玉が作成され、作成されたシャボン玉が通風部45を通る送風によって献血的に噴出口から高く浮き上がる。
(もっと読む)
ヘリコプタ玩具
【課題】機体を安定して上昇させることができ、上昇後に機体を操作することが容易な構成であり、また、構成がシンプルであるために製造コストが安いヘリコプタ玩具を提供する。
【解決手段】本体の両側に延在する少なくとも一組の主翼の端部に配置される少なくとも一組のメインロータと、前記本体の後方に延在する尾部に配置されるテールロータと、本体内部に設けられて各メインロータの回転速度とテールロータの回転速度とをそれぞれ独立して個別に調節するコントローラとを備え、前記メインロータの中心軸が両主翼に対して両ロータがそれぞれ本体から離隔する方向に傾斜するように配置されることを特徴とする。
(もっと読む)
玩具用触覚リモートコントロール装置
【課題】ユーザに更なるインタラクティブな体験を提供し、リモート玩具装置の制御とインターフェースの容易性を大きく向上させることができる装置を提供すること。
【解決手段】触覚フィードバックリモートコントロール装置は玩具装置に制御信号を与える。前記リモートコントロール装置は、筐体(24)と、対応する発泡体(compliant foam)の層(62)と、充電電池(60)と、アクチュエータアセンブリ(50)とを備える。前記対応する発泡体の層(62)は、電池(60)のシステムに対する慣性寄与を低減し、ユーザがアクチュエータアセンブリ(50)で触覚感覚をより強く感じることを可能にする。
(もっと読む)
模型用サーボ装置
【課題】減速機構に遊星歯車を用いて小型で高トルクを得る。
【解決手段】筐体2内に、受信機からの信号によって回転駆動させるモータ4と、大小の平歯車が同軸上に一体化された平歯車ユニット8,10,12を組み合わせることでモータ4の回転を減速伝達する減速機構6と、モータ4の駆動軸5と一致しない位置で駆動軸5に対して平行に設けられ、減速機構6から減速伝達されたモータ4の回転をサーボホーン20に伝達する出力軸7と、出力軸7の回転角度を検出するポテンショメータ27とを備え、ポテンショメータ27により検出された出力軸7の回転角度に基づいてフィードバック制御を行う模型用サーボ装置1において、減速機構6の最後段に、太陽ギア17と、太陽ギア17の周りを自転しながら周回する遊星ギア18とを備えた遊星歯車ユニット14を出力軸7の同軸上に配置する。
(もっと読む)
移動体による眼力トレーニング装置
【課題】 自宅や事務所の就寝時や休憩時に簡単に、低コストで自然に眼力の訓練ができるようにする。
【解決手段】 天井から紐に吊るした玩具飛行体を床上に位置する観察者が観察する。玩具飛行体は紐に吊るされた状態で推力と重力と揚力の動的な釣り合いで定まる旋回飛行をし、その後玩具飛行体は、次第に速度を速め旋回半径が次第に増大し、床面からの高度が次第に高くなり、その後次第に速度が遅くなり旋回半径が次第に小さくなり、床面からの高度が次第に低くなり、更に、紐が玩具飛行体内に次第に巻き取られ、紐が次第に短くなり、玩具飛行体は床面からの高度が次第に高くなり、紐の長さに拘束されて旋回半径が次第に小さくなり、次に紐が玩具飛行体内から巻き戻され、紐が次第に長くなり、床面からの高度が次第に低くなり、紐の長さに比例して旋回半径がやや大きくなり、当該玩具飛行体が前記旋回飛行を繰り返し、観察者が目で該玩具飛行体を観察する。
(もっと読む)
ラジオコントロールカーのシャーシ寸法変更機構
【課題】 従来における走行玩具にあっては、ボディの長さが異なる場合にホイールベースの間隔のみを変更できるものであり、気に入って購入し、あるいは、自分で作成したプラモデルカーのボディの車長が現在使用しているシャーシよりも長い、あるいは、短い場合には対応することができるが、ボディの車幅や車高が高い場合には購入済のシャーシには取付けることができないといった問題があった。
【解決手段】 シャーシ基体1の後部と後輪駆動装置3に一端が接続されたサスペンションプレート2とを接続するためのホイルベースアジャストプレート13を、前記シャーシ基体の長手方向と同じ方向の長さが異なる複数種類を用意し、ボディの長さに応じた前記ホイルベースアジャストプレートを選択交換することで異なる長さのボディに対応するシャーシとしたラジオコントロールカーのシャーシ寸法変更機構である。
(もっと読む)
おもちゃ
【課題】最小限の部材を使用するだけの簡単な構造で興趣に富んだ動作をすることができ、かつその動作に伴って倒れたり、位置が変動したりしないおもちゃを提供する。
【解決手段】柔軟性部材で構成された頭部、略円筒状の胴体部、及び吸盤部からなるおもちゃであって、頭部及び胴体部は一体成形されており、 胴体部と吸盤部とは前記吸盤部の上部を前記胴体部の下部に嵌め込むことによって接合されている。そして、前記吸盤部は一体成形された略円筒状の上部及び逆お椀型の下部とから構成されおり、吸盤部下部の逆お椀型の最大直径は吸盤部上部の略円筒状の最大直径の1〜3倍であり、吸盤部の逆お椀型の部分を床面や壁面などに吸着させることによって使用する。
(もっと読む)
1 - 20 / 43
[ Back to top ]