
Fターム[2D003DB05]の内容
Fターム[2D003DB05]に分類される特許
61 - 80 / 133
重機の高さ制限装置

【課題】重機の作業機が既設高架物に接触する危険を超音波センサを利用して容易かつ確実に回避できる高さ制限装置を提供する。
【解決手段】バックホウ浚渫船1におけるバックホウ3の運転室7の外側面に、作業機6のブーム8の揺動範囲に向けて超音波センサ13を設置すると共に、該超音波センサ13の感知エリアS内にブーム8が侵入したことを検出して警報音を発する警報発生手段(警報器16)を運転室7内に設置する。既設高架物12の下方に設定した危険ラインLに作業機6が到達したときのブーム8の位置に感知エリアSを合せておくことで、作業機6が危険ラインLに到達すると警報器16から警報音が発し、これによって、運転者Mは、直ちに既設高架物12に対する作業機6の接触を回避する操作を行うことができる。
(もっと読む)
作業機械制御装置

【課題】機体に対し作業装置を下げる力を単に減少させるだけでなく、作業装置を下げる力を減少させるタイミングも制限することで、機体の持ち上がりによる振動を抑制できるとともに、機体の落下による振動の発生を防止できる作業機械制御装置を提供する。
【解決手段】メインリリーフ弁36に加えて、コントロール弁24とブームシリンダ17cのロッドエンド側室32との間の出力ライン29に対して、電気チェック弁38と低圧設定用リリーフ弁39を装着することで、ブームシリンダ17cのロッドエンド側室32のリリーフ圧を、高圧(通常圧)と低圧の2段階選択式とする。コントローラ42は、切替スイッチ43がオンであって、かつ、圧力センサ41により検出したブームシリンダ17cのロッドエンド側検出圧が低圧であると判断したときのみ、電気チェック弁38を連通位置に切り替え、ロッドエンド側室32のリリーフ圧を、低圧設定用リリーフ弁39により低圧に設定する。
(もっと読む)
油圧ショベルのフロント制御装置
【課題】効率よく領域制限制御ができる油圧ショベルのフロント制御装置を提供する。
【解決手段】アーム1b、バケット1cの実際の角速度を基にしてバケット先端の速度ベクトルVcを演算し、これから減速ベクトルVRを演算してブーム1aを制御することで、バケット先端が設定領域に沿って動作する領域制限掘削制御を行う。また、フロント作業機1Aのバケット1cの先端を下げるような操作指示がなされているにもかかわらず、バケット1cの先端位置が以前の位置と同じであると判断されると、領域制限制御の設定値(掘削領域の直線式)を補正するように構成した。
(もっと読む)
作業機械のフロント制御方法
【課題】作業機械のフロント制御方法に関し、フロント基部の移動による転倒を確実且つ快適に防止しながらツールの作業効率を確保できるようにする。
【解決手段】フロント基部及びツールからなるフロント装置と可変流量型の油圧ポンプとを備えた作業機械において、油圧ポンプの吐出流量を制限することによりフロント装置の動作を制御するフロント制御方法であって、フロント基部が作動しているか否かを判断する第一ステップと、ツールが作動しているか否かを判断する第二ステップと、フロント装置の姿勢に基づいて、作業機械の安定度を算出する第三ステップと、フロント基部とツールとのうちのフロント基部のみが作動していると判断された場合に、安定度に応じて吐出流量を低減させる制限制御を実施する第四ステップと、少なくともツールが作動していると判断された場合に、制限制御を解除する第五ステップとを備える。
(もっと読む)
浚渫における施工管理方法
【課題】バックホウ浚渫船によって水底土砂の浚渫施工を行なう際に、高い浚渫精度の施工が可能で、しかもバックホウのオペレータの操作が容易であって、効率的な浚渫施工が可能となる浚渫における施工管理方法を提供する。
【解決手段】バックホウ浚渫船による浚渫時に、バックホウの操縦室内の表示機器のモニタ画面上に、事前に測量した地形データや事前設定の目標浚渫線を描画し、バックホウの爪先の軌跡を短時間保持可能とし、バックホウのブームとアームとバケットをその表示機器のモニタ画面上にリアルタイムに表示する浚渫における施工管理方法。
(もっと読む)
作業用機械における干渉防止装置
【課題】 油圧ショベル等の作業用機械において、アタッチメントの位置検出に基づいて運転室とアタッチメントとの干渉を防止する干渉防止制御を行なうにあたり、アタッチメントの大小に関わらず確実な干渉防止を行えるようにすると共に、干渉防止制御領域が広範囲になって作業効率が低下してしまうことを防止する。
【解決手段】運転室4に、アタッチメントまでの距離を検出する距離センサ15と、該距離センサ15の検出方向を変位させるべく距離センサを回転させるモータ16と、距離センサ15の回転角度を検出する角度センサ17とを用いて構成される位置検出装置13を設けた。
(もっと読む)
作業車両用エンジンのパワー出力の制御方法及び制御装置
【課題】建設機械などの作業車両の作業の状態を検出して自動的にエンジンのパワー出力能力を制御する。
【解決手段】変速機(23)の選択されている速度段と、作業機(10)の位置又は姿勢と、車両(1)の走行速度とに基づいて、掘削が行われているか否かが判定される。また、車両(1)の前後方向の傾斜角と、走行速度と、アクセルペダルの開度と、走行加速度とに基づいて、登坂走行が行われているかが判定される。掘削又は登坂走行が行われている時は高パワー出力能力で、それ以外の時は低パワー出力能力で、エンジンが運転される。
(もっと読む)
ブレード制御装置
【課題】簡易な構成であり、簡単な操作で、基準面に対するブレードの高さを制御することができるモータグレーダのブレード制御装置を提供する。
【解決手段】本発明のブレード制御装置1は、基準面B1の位置を感知するための基準面感知板21Aと、基準面感知板21Aとブレード9を連結するための連結手段22と、ある時刻tにおける測定ポイント26までの距離Dtnを検出するための距離センサ10と、距離センサ10で検出された距離Dtnに基づいて、ある時刻tにおける基準面B1に対するブレード9の現状高さHtnを演算し、ブレード9の現状高さHtnと予め設定されたブレード9の設定仕上がり高さHkとの差ΔHを演算し、ブレード9を現状高さHtnから設定仕上がり高さHkとするための変化量αを算出し、変化量αに基づいてブレード9を昇降させるためのコントローラ30と、油圧ユニット40と、シリンダ50と、を備える。
(もっと読む)
施工位置測定システム及び丁張りレスシステム
【課題】この発明は、施工車両における施工手段の施工位置を精度よく測定する施工位置測定システム、及びそれを用いた丁張りレスシステムを提供することを目的とする。
【解決手段】クローラ式のバックホウ30の車両位置情報を取得する車両位置情報取得手段と、前記バケット33の位置を求める施工手段位置情報取得手段とを備え、該施工手段位置情報取得手段を、バックホウ30に備え、バケット33を撮像する車載CCDカメラ32と、車載CCDカメラ32によって撮像された画像に基づいて、バックホウ30に対するバケット33の位置を演算する施工手段位置演算手段とで構成し、車両位置情報取得手段を、少なくとも2つの位置情報が既知である定点20のそれぞれに備え、バックホウ30を撮像する定点CCDカメラ22と、定点CCDカメラ22によって撮像された画像に基づいて、バックホウ30の位置を演算する施工車両位置演算手段とで構成した。
(もっと読む)
建設機械の走行制御装置
【課題】 ステアリング操作時に片方の履帯がハンチング現象等を起こすのを抑え、振動等の発生を防止して車両の乗り心地を向上できるようにする。
【解決手段】 油圧ショベル1の方向転換(ステアリング操作)を矢示C,D,E,F方向のいずれかの方向で行うときには、左,右の走行レバー15L,15Rのうちいずれか一方の走行レバーのみを傾転操作し、他方の走行レバーを中立に保持する。そして、このときに、操作側の走行用制御弁を操作量に対応したストローク量で中立位置(イ)から切換制御し、非操作側の走行用制御弁を中立位置から予め決められた微小ストローク量分だけ切換制御する。これにより、左,右の履帯2L,2Rのうち操作側の履帯を操作量に対応した速度で駆動し、非操作側の履帯はハンチング現象が生じない程度にゆっくりとした速度で駆動する。
(もっと読む)
油圧回路保護装置
【課題】油圧回路保護装置に関し、簡素な構成で、アキュムレータの破損から油圧回路を保護する。
【解決手段】一端を作動油タンク1側に他端を油圧アクチュエータ29a側に接続された、アキュムレータ3を用いた建設機械の油圧再生回路2において、作動油タンク1の内圧を検出する検出手段1aと、作動油タンク1及びアキュムレータ3間に設けられた電気作動式リリーフ弁4と、検出手段1aで検出された作動油タンク1の内圧の上昇率が所定値を超えた場合に、電気作動式リリーフ弁4を閉弁させる信号を出力する電子制御装置5と、検出手段1aで検出された作動油タンク1の内圧を表示するモニタ装置7とを備える。
(もっと読む)
作業機械
【課題】フロント作業装置の把持装置で把持した把持物と運転室の干渉を抑制することができる作業機械を提供する。
【解決手段】走行体1と、運転室2を有し走行体1上に旋回可能に設けた旋回体3と、旋回体3に対して俯仰動可能に設けた作業アーム8と、作業アーム8の先端に旋回可能に設けた把持装置9と、作業アーム8の姿勢を検出するブーム角度検出器71及びアーム角度検出器72と、これら検出器71,72からの検出信号θ1,θ2を基に作業アーム8のピン73の位置を演算する演算装置551と、演算装置551により演算されたピン73の位置が、把持装置9で把持する被把持物101の外形寸法を想定し被把持物101が運転室2に干渉し得る領域として設定された干渉防止領域200にあるとき、把持装置9の旋回動作速度及び作業アーム8の動作速度を制限する制限装置552とを備える。
(もっと読む)
昇降運転室を備えた旋回作業車
【課題】旋回機体に昇降自在に取付けた運転室が、「上昇位置」において旋回機体の旋回始動および停止時に反動により大きく揺れる問題を、旋回操作性を悪化させることなく、また旋回作業車のバランスを悪化させることなく、改善することができる、昇降運転室を備えた旋回作業車を提供する。
【解決手段】旋回作業車が、旋回機体に「上昇位置」および「下降位置」の間を昇降自在に取付けた運転室と、旋回機体を旋回させる旋回アクチュエータの作動を運転室の操作器の出力に基づいて制御する制御器と、運転室「上昇位置」のときには操作器からの出力を調整し制御器の作動速度を「下降位置」に比べて緩やかにする調整手段とを備えている。
(もっと読む)
作業機械
【課題】電動アクチュエータを備えることに起因した問題を招来することなくアイドリング運転を停止して燃料消費量の低減や排出する二酸化炭素量の低減を図ること。
【解決手段】油圧アクチュエータ21,22,23,31,32と、発電電動機44が発電動作した場合の電力を蓄積する一方、発電電動機44が電動動作する場合に電力を供給する蓄電器61と、旋回用電動モータ10とを備え、操作レバー50,70の操作により油圧アクチュエータ21,22,23,31,32及び旋回用電動モータ10を動作させるようにした作業機械において、エンジン40が運転されている状態において操作レバー50,70のニュートラル状態が所定の停止時間継続した場合に、少なくとも蓄電器61が所定の電圧以上蓄電されていることを条件にエンジン40のアイドリング運転を停止させ、かつ旋回用電動モータ10を動作禁止状態に保持するアイドリング停止制御手段110を備えた。
(もっと読む)
オペレータ管理システム
【課題】各種作業機械において、容易に、かつ低コストで利便性に優れたオペレータ管理システムの提供。
【解決手段】オペレータ管理システムは、作業機械と、作業機械を操作するオペレータが所持する携帯電話と、作業機械に対して遠隔した位置に配置されたサーバ3とを備え、作業機械および携帯電話には、自身の位置を特定するGPSセンサと、GPSセンサからの位置情報信号をサーバ3へ送信する位置情報送信手段とが設けられ、サーバ3には、機械位置情報信号を受信した後にオペレータの携帯電話にオペレータ位置情報要求信号を出力するオペレータ位置情報要求手段52と、位置情報信号に基づいて作業機械およびオペレータの位置を判断する位置判断手段54と、判断された位置に基づいて作業機械およびオペレータを互いに関連付けて作業日報を作成するリスト作成登録手段55とが設けられている。
(もっと読む)
埋設物検出装置、管理装置、および建設機械監視システムの埋設物探索方法
【課題】埋設物の深さ位置も含む3次元的な位置を参照することによって建設機械の作業機と埋設物との距離を算出しているため、埋設物の位置を正確に検知し、建設機械による掘削作業中の埋設物の破損を適確に防止する。
【解決手段】埋設物検出装置が、建設機械の周囲に存在する埋設物の確認要求に応じて作業機の3次元位置情報を計算して管理装置へ送信し、管理装置が、埋設物検出装置から送信されてくる作業機の3次元位置情報に応じて埋設物情報の検索を行い、作業機から所定の範囲内に埋設物が存在する場合、該当する埋設物情報を埋設物検出装置へ送信し、埋設物検出装置が、埋設物情報を管理装置から受信した場合、作業機の3次元位置情報を計算し、この3次元位置情報と埋設物情報とをもとに作業機から所定範囲内に埋設物が存在するか否かを判定し、埋設物が存在すると判定した場合、前記作業機の稼動を停止する作業機停止指令を生成して出力する。
(もっと読む)
バックホウ浚渫船の施工支援システムによる水中施工方法
【課題】バックホウ浚渫船において、バックホウ3次元刃先座標を比較的簡易で機械的故障の無いセンサー類でトラブルなく精度良く認識でき、水中作業の施工精度・施工能力の向上が図れ、また作業船の規模・形状などの制約を受けることなく、オペレーターの技量に左右されずに良好な水中施工ができる施工支援システムによる水中施工方法を提供する。
【解決手段】バックホウ2の本体、ブーム3・アーム4に設けたセンサー24、25でバックホウ刃先座標を3次元で把握し、予め入力した設計データとの差をバックホウ運転室や操船室のオペレーターに認識させて施工を支援する施工支援システム(3次元バックホウコントロールシステム)をバックホウ運転室等に搭載し、バックホウ運転室等の表示画面に表示された設計データとバックホウの刃先座標に基づいてバックホウを遠隔操作して水中作業を行う。
(もっと読む)
掘削機の3D集積レーザおよび無線測位誘導システム
掘削機の3D集積レーザおよび無線測位誘導システム(Ex_3D_ILRPGS)は、掘削機(14)の2D水平座標を得るよう構成された移動無線測位システム受信機(12);掘削機のブーム(36)、スティック(38)およびバケット(40)の座標を得るよう構成されたバケット−機械本体測位システム(16);少なくとも1本のレーザビーム(26)を受信するよう構成され、実質的に高い精度で局所的な垂直座標を与えるよう構成されたレーザ検出器(24);移動無線測位システム受信機によって得られた掘削機の2D水平座標と、バケット−機械本体測位システムによって得られた掘削機のブーム、スティックおよびバケットの座標と、レーザ検出器によって得られた局所的な垂直座標とを受信して統合するよう構成され、実質的に高い垂直精度で掘削機のバケットの切刃を誘導するよう構成されたオンボードナビゲーションシステム(28)を含む。 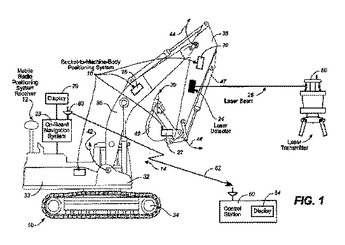 (もっと読む)
(もっと読む)
慣性航法システムを増補するシステムおよび方法
【課題】より高い頻度で、GPS信号またはレーザ信号の一方または両方がブロックされる可能性がある期間中に、正確な位置情報およびエレベーション情報を生成できる位置監視システムを提供すること。
【解決手段】慣性航法システム(INS)を増補するシステムおよび方法は、作業機に関連する位置情報をINSから出力することと、作業機の位置情報と作業機の所望の位置との比較に基づいて作業機を調整することとを含む。INSは、INSの固有の特性によって引き起こされる可能性がある位置情報のドリフトを訂正するために、ファンレーザ、オートマティックトータルステーション(ATS)、GNSS受信器、または地上ベース無線位置決めシステムなどの1つまたは複数の位置決め(または測定)デバイスからの位置情報の関数としてカルマンフィルタによって生成される誤差推定値を使用して、周期的に再初期化される。
(もっと読む)
作業機械の周囲監視装置
【課題】作業機械の周囲の障害物の状況を運転者に適切に報知する。
【解決手段】作業機械71の周囲の障害物の作業機械に対する相対位置を検出する障害物検出手段31〜34と、障害物検出手段31〜34により検出された障害物を、所定時間以上停止している場合に静止障害物と判定し、所定時間以上停止していない場合には移動障害物と判定する障害物判定手段41と、障害物検出手段31〜34による検出結果と障害物判定手段41による判定結果とに基づき、静止障害物70に対応した静止障害物画像90、移動障害物72,73に対応した移動障害物画像92,93、および作業機械71に対応した作業機械画像91を、運転室内に設けられた表示用モニタに互いに異なった形態で表示する監視コントローラ40,45とを備える。
(もっと読む)
61 - 80 / 133
[ Back to top ]