
Fターム[2D003DB05]の内容
Fターム[2D003DB05]に分類される特許
41 - 60 / 133
制御システム、制御方法、操作制御装置及び作業装置
【課題】被制御体とその周辺にある障害物とが接近していることを操作者に伝えて遠隔制御に係る操作性を向上させる。
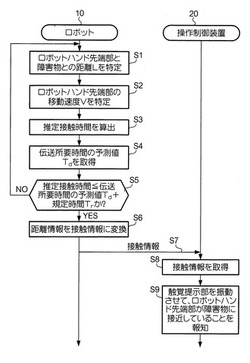
【解決手段】ロボット10は、ロボットハンド先端部とその周辺にある障害物との距離Lと、ロボットハンド先端部の移動速度Vを特定し(S1,S2)、ロボットハンド先端部が障害物に接触するまでの推定接触時間を算出する(S3)。ロボット10は、ロボットハンド先端部が障害物に接近している旨を通知する接触情報を操作制御装置20宛てに送信した時から、通信路を経由して接触情報が操作制御装置20に到達するまでの伝送所要時間の予測値Tdを取得する(S4)。ロボット10は、推定所要時間が予測値Tdと規定時間Trとの和以下になると(S5;YES)、接触情報を送信する(S6,S7)。これにより通信遅延の程度に関わらず、操作制御装置20は、現に接触がある前に接触情報に基づき両者の接近を報知する(S8,S9)。
(もっと読む)
車両及び車両の運転方法

本発明は、(i)アンダーキャリッジ(20)と、前記アンダーキャリッジ(20)に対して垂直軸(90)の周りを回転可能に配設されたアッパーキャリッジ(30)、及び(ii)前記アッパーキャリッジ(30)に対して水平軸(80)の周りを回動可能に配設されたてこ手段(40)の少なくとも一方を備えた車両(10)であって、前記車両(10)の傾斜運動に対して少なくとも1つの安定性基準を監視するためのセンサシステム(100)が提供され、制御装置(150)が前記センサシステム(100)に連結されて、前記少なくとも1つの安定性基準に応じて前記車両(10)を安定化させるための動作を自動的に開始及び/又は実行する、車両(10)に関する。これにより車両の予期せぬ傾斜リスクが軽減される。 (もっと読む)
作業装置用制御回路および作業機械
【課題】高所作業と地表近くの作業との双方に適切な速度で対応できる作業装置用制御回路を提供する。
【解決手段】アッパブーム用制御弁13をパイロット操作するリモコン弁15は、アッパブームシリンダ4aを縮み動作させる縮み側リモコン弁15aと、アッパブームシリンダ4aを伸び動作させる伸び側リモコン弁15bとを備えている。伸び側リモコン弁15bの2次側からアッパブーム用制御弁13へのパイロット回路には、パイロット圧を制限する電磁比例減圧弁16を設ける。電磁比例減圧弁16のソレノイドには、コントローラ19の出力部を接続する。このコントローラ19は、ロアブーム角度センサ7と、アッパブーム角度センサ8とにより検出したアッパブームの先端高さが高いときは、圧力センサ20により検出した伸び側リモコン弁15bの2次圧を電磁比例減圧弁16により絞り制御する。
(もっと読む)
ハイブリッド型作業機械
【課題】
モード選択を正確に行うことのできるハイブリッド型作業機械を提供することを課題とする。
【解決手段】
ハイブリッド型作業機械は、前記電動作業要素を操作するための操作部と、前記電動作業要素を駆動するための駆動指令を前記操作部に入力される操作量に対応付けた駆動指令テーブルであって、前記操作量に対する駆動指令値の異なる複数の駆動指令テーブルを格納するテーブル格納部と、前記操作部に入力される操作量が絶対値で第1所定値までの不感帯を超えてから絶対値で第2所定値に到達するまでの判定領域内における到達度合により、操作量が前記第2所定値を超えた場合に出力する駆動指令を決定するための駆動指令テーブルを前記複数の駆動指令テーブルから選択するテーブル選択部と、前記テーブル選択部によって選択された駆動指令テーブルを用いて、前記操作部に入力される操作量に応じた駆動指令を出力する駆動指令出力部とを含む。
(もっと読む)
無線操縦式車両の走行制御方法
【課題】送信機から送信した電波を車両の受信機で受信できなくなった場合に対処できる無線操縦式車両の走行制御方法を提供する。
【解決手段】送信機19から送信した電波により、この電波を受信するラジコン受信機16を搭載した作業機械車両11を無線操縦し、作業機械車両11は、移動しながらGPS受信機17により取得した自身の移動軌跡の位置座標を記録する。送信機19とラジコン受信機16との間で通信用の電波が途絶えたときに、作業機械車両11は、それまでに移動しながら記録した位置座標を逆にたどって、送信機19から送信された電波をラジコン受信機16で受信できる電波到達域A内まで戻る。
(もっと読む)
建設機械の油圧駆動装置
【課題】油圧ポンプの急激な駆動負荷の発生を未然に抑止して、エンジンの回転数低下を防止する。
【解決手段】エンジン12で駆動する油圧ポンプ14と、該油圧ポンプ14からの吐出油が供給される油圧シリンダ16とを含む油圧駆動回路を有し、複数又は単数の油圧アクチュエータである油圧シリンダ16の少なくとも1つにストロークセンサ21を取り付ける。このストロークセンサ21は、油圧ポンプ14を駆動制御するコントローラ25に接続する。そして、該コントローラ25により、油圧シリンダ16がストロークエンド近傍に到達したときに、該油圧シリンダ16の作動を維持できる範囲内で、油圧ポンプ14の駆動負荷に関連する吸収トルク等の状態量が減少するように制御する。
(もっと読む)
建設機械
【課題】
簡便な構成で建設機械本体に対する位置、傾斜等を含む姿勢を正確に、而もリアルタイムで検出可能とした姿勢検出装置、及び該姿勢検出装置を具備した建設機械を提供する。
【解決手段】
建設機本体14と、該建設機本体に設けられた工事作業具8と、前記建設機本体の機械中心に対して既知の位置に設けられた2つのカメラ18,19と、前記工事作業具に設けられ、前記2つのカメラの視野にそれぞれ含まれる様に配置された少なくとも3のターゲット21と、前記2つのカメラで取得したステレオ画像から各画像中で共通する少なくとも3のターゲット像を抽出し、該各ターゲット像の3次元位置を求め、求めた3次元位置に基づき前記工事作業具の前記建設機本体に対する位置、姿勢を算出する演算処理装置とを具備する。
(もっと読む)
建設機械における作業判定システム
【課題】建設機械の行なう作業を判定して該作業に適した制御を行なうための作業判定システムを設けるにあたり、誤判定によりオペレータが意図しない制御が実行されてしまうことを回避する。
【解決手段】検出データをバッファ57に記憶して該検出データの所定時間内の平均値を常時演算し、該検出データの平均値に基づいて掘削作業の判定を行なう作業判定部56を設けると共に、掘削作業の判定の基準として、掘削作業の開始を推定できる第一判定基準S1と、特定作業が行なわれていると確定できる第二判定基準S2とを設定し、第二判定基準に適合する場合には掘削作業に適した掘削作業用制御を行なう一方、第一判定基準には適合するが第二判定基準に適合しない場合は、掘削作業用制御の予備の制御である掘削作業用予備制御を行なう構成にした。
(もっと読む)
作業機械の操作装置
【課題】作業中の負荷情報をオペレータに正確に、かつ、レバー操作の邪魔にならないように伝達する。
【解決手段】アクチュエータを操作する操作レバー1のノブ3にスライダー18を、水平方向にスライドしてノブ外周からの突出量が増減する状態で設ける。一方、作業中の負荷を検出する各センサ6〜10からの信号に基づいてコントローラ12で負荷を演算し、この負荷に応じてスライダー18を外向きにスライドさせることによりノブ3の外形を変形させ、この変形を負荷情報として、手の触覚を通じてオペレータに伝達するようにした。
(もっと読む)
作業機のフロート制御システム
【課題】アームにおけるフロート制御を行うにあたって、そのフロート動作をスムーズ且つ確実に行うことができるようにする。
【解決手段】コントローラ75は、アーム22をフロート動作させるためのフロートモード76を備え、コントローラ75には、切換装置65を動作させるフロートスイッチ77が接続され、コントローラ75のフロートモード76は、アーム用油圧アクチュエータ26のボトム側の圧力が所定値以下となったときにおいてフロートスイッチ77の操作を行ったときに切換装置65の開動作を許可する。
(もっと読む)
モータグレーダのブレード高さ制御装置
【課題】モータグレーダのブレード高さ制御装置において水糸のような基準線の設定の手間を削減することができ、また、モータグレーダに適した簡単な構成とする。
【解決手段】モータグレーダ10の車体に設定された測定点に取り付けられて、放射状にレーザビームを照射し、複数の反射地点から反射されたレーザビームを受信するレーザスキャナ32と、レーザスキャナ32から得られる測定点と複数の反射地点との計測距離から、ブレード22の高さを調整するための調整信号を出力する制御手段と、を備える。制御手段は、前記測定点と複数の反射地点との計測距離から各反射地点の高さを演算し、前記複数の反射地点の高さの中から、ブレード22の高さを検出すると共に、前記複数の反射地点の高さから基準値を求め、ブレード22の高さが基準値に追従するようにブレード22の高さを調整するための信号を出力する。
(もっと読む)
建設機械
【課題】腕体を自重降下させる際にその腕体の位置エネルギーを効率的に回生する建設機械を提供すること。
【解決手段】
吐出量可変の油圧ポンプ10Rが吐出する圧油により油圧アクチュエータ7を作動させながら腕体4を動作させる建設機械1は、腕体4の自重方向への動作に応じて油圧アクチュエータ7から流出する圧油によって回転させられる回生モータ55と、回生モータ55を回転させた圧油を油圧アクチュエータ7に戻す圧油再生部54、70、71とを備える。
(もっと読む)
作業車両
【課題】静油圧式無段変速装置の作動を機械的連動機構でなく電子制御機構により行い、常に正確に静油圧式無段変速装置を作動可能な走行車両を提供すること。
【解決手段】エンジンの動力を回動角度を調整して出力する静油圧式無段変速装置8のトラニオン軸8aの回動角度をピストンロッド6aのストローク長さを油圧シリンダ6で決めるが、前進ペダル1aと後進ペダル1bとの間でのペダル踏み込み位置の切り替え時にペダルセンサ3sが中立位置を検知すると、所定時間中立位置にトラニオン軸8aをとどめ、その後所定時間後にペダルセンサ3sで検知する前進ペダル1a又は後進ペダル1bの位置に応じたトラニオン軸8aの回動角度にする制御を行う。前進ペダル1aと後進ペダル1bとの間で速やかに踏み替え操作した場合であっても、変速ショックが著しくオペレータの体が揺られフィーリングが悪くなることがなく、また、機械部品の耐久性の劣化を防止できる。
(もっと読む)
作業機械
【課題】作業腕や作業具の破損を防止できる作業機械を提供する。
【解決手段】制御回路36は、圧力センサ401の検出圧力に基づき、作業負荷に応じて把持装置の位置・姿勢を追従させた際の作業具シリンダのシリンダロッドの伸縮方向を判定するとともに、アキュムレータの蓄圧油量を算出し、アキュムレータの蓄圧油量に相当するシリンダロッドの伸縮量を算出する。制御回路36は、算出したシリンダロッドの伸縮量だけ、作業負荷に応じて把持装置の位置・姿勢を追従させたときとは逆方向に作業具シリンダのシリンダロッドを伸縮させた際の、アームに対する把持装置の仮想の位置・姿勢を仮想姿勢演算部703で算出する。そして、制御回路36は、実際のフロント作業腕および把持装置の位置・姿勢と、算出した把持装置の仮想の位置・姿勢をモニタ550に表示させる。
(もっと読む)
地ならし機の動的安定化および制御
【課題】制御システムを含む地ならし機を提供すること。
【解決手段】機械は、地ならし機上で長手方向に取り付けられた第1および第2の衛星アンテナを備える。第3の衛星ナビゲーション・アンテナが、地ならし機の動作要素に取り付けられた柱に取り付けられている。一実施形態では、地ならし機はブルドーザであり、動作要素はブルドーザの刃である。機械はさらに、重力基準センサと、機械に取り付けられた複数のジャイロスコープとを備える。コンピュータ・プロセッサは、様々な構成部品から受信したセンサ・データに基づき制御信号を発生させる。開示されたシステムおよび方法により、望まない振動を発展させることなく、比較的速い速度で地ならし機の動的安定動作が可能になる。
(もっと読む)
作業機械の位置管理システム、及び作業エリアデータの更新方法
【課題】作業機械がサーバから送信される情報を確実に受信できるようにする。
【解決手段】作業機械1は、作業エリアデータ35を記憶した記憶装置33と、作業エリア内に、作業エリアよりも狭い監視エリアが設定されているときGPSセンサ14が検出した現在位置に基づいて、作業機械1が監視エリア内かを監視する位置監視部32と、を備える。位置監視部32が、作業機械1が監視エリア外であると、作業エリアデータ35の識別情報をサーバへ送信する。サーバは、作業エリアデータを記憶した記憶装置を有する。作業機械1から通知された作業エリアデータ35の識別情報が、作業エリアデータの識別情報と異なるとき、作業エリアデータを作業機械1へ送信する。
(もっと読む)
移動機械により移動される経路を決定する方法および装置
【課題】移動機械の後続する経路の始点および終了点を計算するために用いられる左および右境界のベクトルを決定する。
【解決手段】連続する経路(22)の終了点(104)は、平行するラインに沿って作業経路(22)の幅分の距離を増すことにより見出される。Vt1とVs1とのベクトル外積が計算され、ベクトル外積の符号が、次の経路の始点および終了点を計算するのに用いるべく、左および右境界のベクトルVlおよびVrを決定するために用いられる。仮に、Vt1とVs1とのベクトル外積の符号が負であれば、角地点P(0)およびP(1)の間の境界ベクトルVl1が用いられる。仮に、ベクトル外積の符号が正であれば、角地点P(1)およびP(2)の間の境界ベクトルVl2が用いられる。
(もっと読む)
建設機械
【課題】建設機械の油圧アクチュエータを使った作業において、エネルギーのロスを減少させる。
【解決手段】ブームと、ブームに取り付けられたバケットを有する建設機械において、バケットレバーがチルト位置になっていて(S24:Yes)、かつ、バケットがチルトエンドになっているとき(S26:Yes)、コントローラは、方向制御弁を制御してバケットシリンダへの圧油の供給を停止させる。
(もっと読む)
作業機械における干渉防止制御装置
【課題】キャブおよび作業装置の一方が動いている最中に他方を動かしても作業装置のツールとキャブとの干渉を防止でき、作業能率を向上できる干渉防止制御装置を提供する。
【解決手段】キャブを可動的に設けた作業機械にて、キャブ位置を検出するキャブ位置センサ43と、作業装置先端のツール位置を検出するブーム角センサ41およびアーム角センサ42をコントローラ77に接続する。作業装置を作動するブームシリンダ23およびアームシリンダ26の動作を規制する電磁比例弁71〜74をパイロット操作式コントロール弁47のパイロット通路中に設け、それらのソレノイドをコントローラ77に接続する。コントローラ77は、キャブ位置センサ43で検出したキャブ位置と微分演算したキャブ移動速度から移動ベクトルを求め、一定時間後のキャブ位置を予測し、その予測位置とツール位置とが干渉しないように電磁比例弁71〜74によりブームシリンダ23およびアームシリンダ26を制御する。
(もっと読む)
作業機械における干渉防止制御装置
【課題】ツール位置に応じてキャブの動きを規制することでキャブがツールと干渉することを防止でき、作業能率を向上できる作業機械における干渉防止制御装置を提供する。
【解決手段】可動的に設けたキャブ位置を検出するキャブ位置センサ43と、作業装置先端のツール位置を検出するブーム角センサ41およびアーム角センサ42をコントローラ77に接続する。キャブ昇降シリンダ32の動作を規制する電磁比例弁75,76をパイロット操作式コントロール弁47のスプール50のパイロット通路中に設け、それらのソレノイドをコントローラ77に接続する。コントローラ77は、キャブ位置センサ43により検出したキャブ(キャブ干渉域)の位置と、ブーム角センサ41およびアーム角センサ42により検出したツールの位置から、それらの位置関係に基づきキャブとツールとが干渉しないように電磁比例弁75,76によりキャブのアクチュエータ動作を制御する。
(もっと読む)
41 - 60 / 133
[ Back to top ]