
Fターム[2D129CA05]の内容
Fターム[2D129CA05]に分類される特許
1 - 12 / 12
掘削機及び掘削孔の形成方法
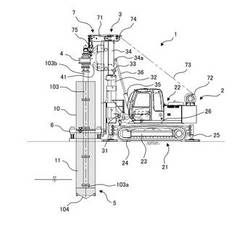
【課題】比較的簡素な構成で掘削孔の形成とケーシングの圧入とを一体的に行う。
【解決手段】掘削機1を構成する自走可能なベースマシン2は、その前方で、柱状のリーダ3を支持する。リーダ3に沿って昇降するスイベルヘッド4は、鉛直方向に地盤を回転掘削する回転掘削装置5の駆動源である。ケーシング圧入装置6はベースマシン2又はリーダ3の下端部に着脱可能に取り付けられており、ケーシング10をその外方から挟持して回転させつつ地盤に圧入する。スイベルヘッド4の回転軸と、回転掘削装置5の回転軸と、ケーシング圧入装置6内のケーシング10の中央軸とは、互いに略一致する。ケーシング圧入装置6は回転掘削装置5の掘進速度に同調させた圧入速度でケーシング10を地盤に圧入し得る。回転掘削装置5の回転掘削により形成される掘削孔11は、その孔壁が、ケーシング圧入装置6により圧入されるケーシング10によって覆われて防護される。
(もっと読む)
ハンマーグラブ制御システム

【課題】ハンマーグラブの回転を制御すて、油圧配管チューブ等の捩じれ破損を防止するハンマーグラブ制御システムを提供する。
【解決手段】筒状基枠10に、地盤中に打ち込まれるケーシングCの中心部側から半径方向に進退移動可能で、ケーシングC内周面に圧接し筒状基枠10をケーシングCと一体化するプッシャー31を有するスタビライザー13を一体的に設け、スタビライザー13に一体的に連結する内軸体14aと回転可能に外嵌された外筒体14bとからなるスイベル機構14を有し、スイベル機構14の外筒体14bに吊り下げ接続部5を設けたハンマーグラブH1において、伝動機構を介してスイベル機構14の外筒体14bを回転駆動するモータ3と、ハンマーグラブH1の回転時に発生する外筒体14bの周方向のねじれ角を補正し、モータ3の回転を制御して外筒体14bをねじれ前の位置に復帰させるモータ制御装置4を有する。
(もっと読む)
可動機械用のテザー追跡システムおよび同方法
可動機械(12)用のテザー追跡システム(28)が開示される。テザー追跡システムは、可動機械に配置されて、可動機械が作業現場を移動して回るときに、可動機械から固定供給源(14)まで延びるテザー(16)を選択的に取り出し、巻き取るスプール(26)を有することができる。テザー追跡システムはまた、スプールパラメータを示す第1の信号を生成する、スプールに付属する少なくとも1つのセンサ(32)と、可動機械の位置を示す第2の信号を生成する、可動機械に付属する位置特定システム(33)と、少なくとも1つのセンサおよび位置特定システムと通信するコントローラ(34)とを有することができる。コントローラは、第1および第2の信号に基づいて、テザー回避ゾーン(24)を定めるように構成することができる。 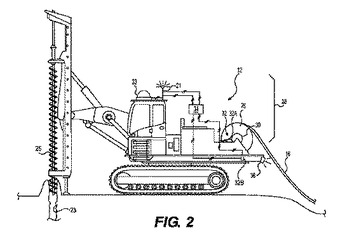 (もっと読む)
(もっと読む)
掘削装置および土木施工方法
【課題】土木施工を行うための掘削装置において、簡便な構成でドリルストリング内部への建設材料の供給を高い信頼性で行う。
【解決手段】ドリルストリング1を回転式に駆動する掘削駆動部10と、建設材料を建設材料用ホース6からドリルストリング1の内部へと送り出すための回転フィードスルー20を備え、回転フィードスルー20は、建設材料用ホース6のための第一の配管連結部21と、第一の配管連結部21に関して回転自在なドリルストリング1のための第二の配管連結部22を有し、第二の配管連結部22を第一の配管連結部21に関して能動的に回転させるための回転装置30を含む。
(もっと読む)
作業装置付き杭打機
【課題】取り扱いが容易な低コストの作業装置付き杭打機を提供すること。
【解決手段】本体12前方に立設されたリーダ15に対して摺動可能に装着された作業装置20を吊りワイヤ10によって吊設し、ウインチ13による吊りワイヤ10の巻上げ及び巻下げによって作業装置20に連結された作業用ロッド80に回転を与えながら昇降させて所定の作業を行うものであり、作業装置20は、その上方にあってリーダ15に対して摺動可能に装着された位置決め装置23と圧入シリンダ26によって連結され、その位置決め装置23とリーダ15との間には、位置決め装置23をリーダ15の任意高さで移動できないように停止させる位置決め機構18,22,27が設けられた作業装置付き杭打機1。
(もっと読む)
杭施工機
【課題】杭径や地盤性状が多様に変化する場合においても、その構成機器や杭を損傷させることなく品質に優れた杭基礎施工を実現できる杭施工機を提供すること。
【解決手段】その回転数とトルクの組合せを2パターン以上有した可変容量型の油圧モータ10,20を2基備え、かつ該油圧モータ10,20の回転を減速する減速機30を備えたオーガ駆動装置4をベースマシン1のリーダに沿って昇降自在に装備してなる杭施工機100であって、油圧モータ10,20は、トルク性能および回転性能からなる出力性能がそれぞれに異なる油圧モータであり、各油圧モータ10,20の有する出力性能と、各油圧モータ10,20の駆動の有無と、から規定されるオーガ駆動装置4の出力パターンを格納する格納手段と、該格納手段における出力パターンを自動選択してオーガ駆動装置4を駆動させる選択手段と、を具備している。
(もっと読む)
岩洞掘削用穿孔パターンの設計
本発明は、穿孔パターンを設計する方法およびソフトウエア製品と、さらに制御装置において穿孔パターンの設計用ソフトウエア製品を実行可能な削岩リグに関する。穿孔パターン(12)の1群の孔(14、15、16、32、17)について、少なくとも1つの優勢要因を有する少なくとも1つのマスタ孔(13a、13e、17a、17b、35、45、48)を決定することができる。マスタ孔の優勢特性に基づいて、少なくとも1つの他の穿孔の特性を決定する。マスタ孔は孔位置マスタ、孔深度マスタでよい。 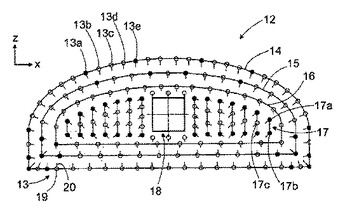 (もっと読む)
(もっと読む)
削岩装置および削岩装置の制御方法
複数のアクチュエータユニット(2aないし4b)、ユーザインタフェース制御部(6)、およびユーザインタフェース制御部(6)へ接続され削岩装置(1)の各機能を制御する少なくとも1つの操作手段(7ないし9)を備え、さらに各アクチュエータユニット(2aないし4b)ごとに、ユーザインタフェース制御部(6)の制御の下に接続されユーザインタフェース制御部(6)より与えられる制御信号に従ってアクチュエータユニット(2aないし4b)の作動を制御する制御要素を備えた削岩装置、ならびに削岩装置の制御方法。削岩装置のアクチュエータユニット(2aないし4b)の制御要素が故障すると、他のアクチュエータユニット(2aないし4b)を制御する必要がなければ、前記他のアクチュエータユニット(2aないし4b)の制御要素を接続して最初のアクチュエータユニット(2aないし4b)を制御する。  (もっと読む)
(もっと読む)
ロックドリル装置の運転制御方法およびロックドリル装置
ロックドリル装置(1)の運転制御方法およびロックドリル装置(1)。ロックドリル装置(1)のフラッシング媒体の流量(FLOW)を判定し、判定した流量(FLOW)に基づいてフラッシング媒体の圧力(p_FLOW)を調整することによりロックドリル装置(1)の運転を制御する。 (もっと読む)
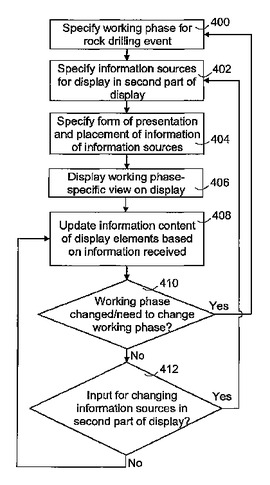
削岩装置用の適応ユーザインタフェース
本発明は、削岩装置を用いて行われる多段階削岩作業を制御する制御装置に関する。削岩装置またはその制御ユニットのディスプレイでは、第1の部分が、実質的に一定の情報源用に設定でき、第2の部分が、削岩状況に応じて切り換えられる情報源用に設定できて、それに関連した情報が前記削岩状況時に表示される、少なくとも1つの情報源に関して、削岩状況を特定するように、定義が制御装置にセットされる。削岩作業の作業段階を照合し(400)、前記定義に基づいて前記段階に適した情報源を選択する(402)。削岩段階の実行中に、少なくとも1つの選択した情報源に関連した情報を前記表示部分に表示する(406)。
 (もっと読む)
(もっと読む)
建設機械におけるブーム位置決め制御方法
【課題】ブームを作動させるサーボ機構を有しない、既存の建設機械に対して、位置決め制御機能を持たせるようにする。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に発光ダイオード8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも2箇所以上に撮像装置9A、9Bを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記撮像装置9A、9Bの各設置座標を既知とした状態で、前記撮像装置9A、9Bの画像G1,G2に写る発光ダイオード8A1、8B1の座標を3次元画像処理によって求めることにより、前記ガイドシェル12の位置及び方向を計測し、前記削岩機13を所定の穿孔位置まで移動させる。
(もっと読む)
削岩機搭載台車における穿孔位置決め制御方法
【課題】ガイドシェル、ブームを作動させるサーボ機構を有しない、既存の削岩機搭載台車に対して、穿孔位置決め制御機能を持たせるようにする。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に発光ダイオード8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも2箇所以上に撮像装置9A、9Bを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記撮像装置9A、9Bの各設置座標を既知とした状態で、前記撮像装置9A、9Bの画像G1,G2に写る発光ダイオード8A1、8B1の座標を3次元画像処理によって求めることにより、前記ガイドシェル12の位置及び方向を計測し、前記削岩機13を所定の穿孔位置まで移動させる。
(もっと読む)
1 - 12 / 12
[ Back to top ]