
Fターム[2D129CB07]の内容
Fターム[2D129CB07]に分類される特許
21 - 27 / 27
穿孔方法、制御方法、穿孔装置及び砥石ビット
【課題】コンクリート構造物に穿孔する際に、コンクリート構造物内に埋設されている各種の配管等を切断したり傷付けたりするのを防止する。
【解決手段】コンクリート構造物65に孔を形成するための穿孔方法であって、穿孔面が平面で形成されるとともに、軸線方向に貫通するコア孔が設けられ、かつ、該コア孔の内外を貫通する孔又はスリットが少なくとも1箇所に設けられる円柱状の砥石ビット55を用い、流体供給手段45により前記コア孔を介して前記穿孔面に流体を供給しながら、該砥石ビット55を回転させつつ推進させることにより、前記コンクリート構造物65に孔を形成する。
(もっと読む)
地盤改良装置および掘削施工方法

【課題】簡便且つ低コストに回転軸の傾斜度を計測することができ、回転軸の鉛直精度の向上に寄与することのできる地盤改良装置を提供する。
【解決手段】リーダー103の下端部に設けた下部振れ止め機構150のフレーム内に、鉛直な軸回りに回転可能な4個以上の水平回転ローラ152を周方向に間隔をおいて配置し、それら水平回転ローラを各々横荷重計301を介してフレームにより回転自在に支持し、水平回転ローラの内側に内接させ且つ落下を止めた状態で、鉛直な軸回りに回転可能に回転筒153を配置し、その回転筒の内周に周方向に間隔をおいて、水平な軸回りに回転可能な3個の垂直回転ローラ154を配置し、垂直回転ローラの内側に内接するように回転軸101を貫通させて、横荷重計の測定値のバランスにより回転軸の傾斜度を測定する。
(もっと読む)
1モータ二重出力式掘削機の制御方法及び装置
【課題】 1モータ二重出力式掘削機において、外側軸のトルク制御を安価に行い、高トルクによるケーシング、リーダ、ベースマシン等の破損防止を可能とする。
【解決手段】 外側軸の排土カップリングを2重構造として、その上部側と下部側間に旋回ベアリング等を挿入して摺動自在とし、トルク伝達を荷重計又はトルクを計測できる水平油圧シリンダ(油圧を逃がすリリーフ弁付)等を介して行わせ、検出したトルクを無線でトルク設定コントロールボックスへ送信し、設定トルクを超える負荷が掛かったとき、警報を出すと共に停止信号を出し機械衝撃による破壊防止を図ることを特徴とする。
(もっと読む)
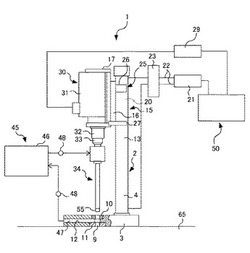
工具状態監視システム
本発明は、少なくとも1個の幾何学的に定義されたブレードとともに作動中に回転する工具要素2、具体的には、材料切削工具要素2を備える工具1に関する。上述工具要素2は作動状態で作動パラメータの影響を受けやすい。測定装置3は、作動パラメータの測定及び作動パラメータの測定信号への変換のために備えられる。第1の測定装置3、31は、本質的に第1の工具要素2、21に対する第1の作動パラメータだけが第1の測定装置3、31によって記録されることができるように作動状態で第1の工具要素2、21と協働する。 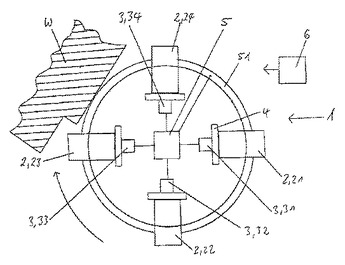 (もっと読む)
(もっと読む)
掘削パラメータの制御装置及び方法
本発明は、削岩時の掘削パラメータを制御する方法及び装置に関する。本装置は、ドリル工具が一つ或いは複数のドリルストリング構成部材によって掘削機に接続可能であるように構成され、本装置は、削岩中ドリル工具を回転し、またドリル工具、一つ或いは複数のドリルストリング構成部材及び掘削機のグループから一つ或いは複数の間でジョイントを締め付けるための締め付けトルクを提供する手段を備えている。本装置は有効な締め付けトルクに基づいたドリル工具の回転速度を制御するように構成される。 (もっと読む)
バック・リーミング用自動制御システム
【課題】 「バック・リーミング」作業中のドローワークスの自動作業を行う制御システムを提供することにある。
【解決手段】 本発明の制御システムは、バック・リーミング作業中に或る吊上げ速度および吊上げトルクで掘管を移動させるホイストシステムを有する。オペレータ制御ユニットは、オペレータが少なくとも1つのバック・リーミングパラメータの所定値を入力することを可能にする。バック・リーミングパラメータセンサは、少なくとも1つのバック・リーミングパラメータの測定値を取得する。制御システムは、少なくとも1つのバック・リーミングパラメータをモニタする。ブレーキ組立体は、少なくとも1つのバック・リーミングパラメータの測定値と、少なくとも1つのバック・リーミングパラメータの所定値とが等しくなると、ドローワークスシステムの吊上げトルクに抵抗する。 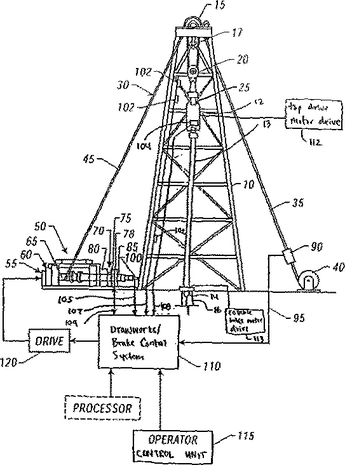 (もっと読む)
(もっと読む)
チューブラーのメイクアップの制御システム
第1チューブラー(106)と第2チューブラー(114)の間のねじ接続を行うためのメイクアップコントロールの方法とシステム(100)が提供される。このシステム(100)は第1チューブラー(106)に接続されたトップドライブ(101)と、少なくとも1つの命令信号をトップドライブに送る、トップドライブに作用上接続されたコントローラー(102)とを含む。トップドライブ(101)は少なくとも1つの命令信号に応答してトルクと回転スピードを発生し、トルクと回転スピードは第1チューブラーと第2チューブラーの間のメイクアッププロセスの間第1チューブラー(106)に加えられる。トップドライブ(101)はまたコントローラー(102)に伝達されるトルクフィードバック信号を発生し、コントローラーはメイクアッププロセスの間、第1チューブラー(106)に加えられるトルクと回転スピードを監視することができる。
コントローラー(102)はあらかじめ決定されたトルクリミットに到達した場合にはメイクアッププロセスを停止する。 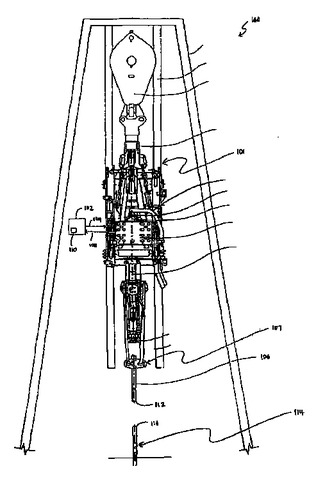 (もっと読む)
(もっと読む)
21 - 27 / 27
[ Back to top ]