
Fターム[2F034EA02]の内容
運動の有無又は方向の指示又は記録 (1,376) | 運動方向の正逆、左右の検出 (197) | 直進運動 (17)
Fターム[2F034EA02]に分類される特許
1 - 17 / 17
気圧センサを用いて昇降移動状態を推定する携帯装置、プログラム及び方法
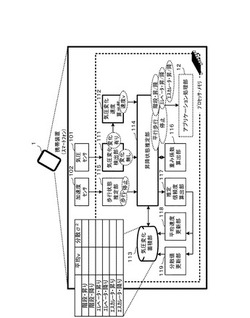
【課題】携帯装置に搭載された気圧センサを用いて、利用者の昇降状態をできる限り高い精度で推定することができる携帯装置等を提供する。
【解決手段】昇降状態毎に、その昇降状態時における気圧変化速度に基づく平均vu ̄及び分散σu2を予め記憶した気圧変化記憶手段113と、気圧センサ101によって計測された時間経過に伴う気圧値について、所定時間範囲に所定閾値以上で変化したか否かを検出する気圧変化検出手段111と、気圧変化検出手段によって真と判定された際、当該気圧値における気圧変化速度vを算出する気圧変化速度算出手段112と、気圧変化記憶手段に記憶された平均vu ̄及び分散σu2を用いて、昇降状態毎に、気圧変化速度vにおける正規確率分布を算出し、最も高い確率値となる昇降状態を、当該昇降状態として推定する昇降状態推定手段114とを有する。
(もっと読む)
車両用制御装置

【課題】横加速度の向きとヨーレートの向きを利用して車両の前進または後退を精度良く判定する。
【解決手段】車両用制御装置は、横加速度ayとヨーレートωとに基づいて車両の前進・後退を判定する進行方向判定手段24と、横加速度ayと基準値との偏差である横加速度変動量Δayを算出する変動量算出手段23と、転舵速度算出手段22とを備える。進行方向判定手段24は、ステアリングを左に操舵するときの転舵速度Δθの符号と、安定して左旋回しているときに作用する横加速度ayの符号を正と規定し、ステアリングを右に操舵するときの転舵速度Δθの符号と、安定して右旋回しているときに作用する横加速度ayの符号を負と規定したとき、横加速度変動量Δayの絶対値が第1の所定値以上であり、かつ、横加速度変動量Δayおよび転舵速度Δθのうち、一方が正であり、他方が負であるとき、車両が前進しているという判定を行わないように構成される。
(もっと読む)
車両用制御装置
【課題】車両の前進または後退を精度良く判定することができる車両用制御装置を提供することを目的とする。
【解決手段】車両用制御装置は、車両の前進または後退を判定する進行方向判定手段22を備える。前記進行方向判定手段22は、ステアリングを左に操舵したときの操舵角の値(操舵角センサ92の出力値)の符号と、車両が安定して左旋回しているときに作用する横加速度の値(横加速度センサ93の出力値)の符号を第1の符号(正)と規定し、ステアリングを右に操舵したときの操舵角の値の符号と、車両が安定して右旋回しているときに作用する横加速度の値の符号を第2の符号(負)と規定したとき、ステアリングが操作されてから所定時間内に、操舵角の値および横加速度の値のうち、一方が第1の符号であり、他方が第2の符号であるとき、車両が後退していると判定する。
(もっと読む)
車両の前進判定装置及び車両の前進判定方法
【課題】車両が前進中であるか否かの判定精度を向上させることができる車両の前進判定装置及び車両の前進判定方法を提供する。
【解決手段】ブレーキ用ECUは、エンジン回転数Ne及び駆動輪の車輪速度VWを取得し(ステップS11,S13)、エンジン回転数Ne及び駆動輪の車輪速度VWに基づき推定変速比Rgeを演算する(ステップS15)。そして、ブレーキ用ECUは、推定変速比Rgeに基づき変速装置の変速段が前進用の変速段に設定されていると判定すると共に(ステップS16:YES)、車両が加速中であると判定した(ステップS22,S25:YES)場合に、前進判定フラグFLGを「1」にセットする(ステップS26)。
(もっと読む)
移動方向検出装置
【課題】対象物体の検出の精度を向上し、検出における誤りを低減する移動方向検出装置を提供する。
【解決手段】移動方向検出装置は、対象物体の有無により出力する信号が変化するセンサ部と、前記センサ部から出力される信号のレベルの変化に応じて、前記対象物体の有無を判断する閾値を変化させて、前記センサ部から出力される信号と該閾値とを比較することにより前記対象物体の有無を示すパルス信号を出力する比較部と、前記比較回路から出力されるパルス信号から前記対象物体の移動方向を出力する判定部とを具備する。
(もっと読む)
車両の進行方向検出装置及びその方法
【課題】車輪速度センサや加速度センサの出力の信頼度が低下する極低速、例えば5[km/h]以下での車両の前進状態又は後進状態を確実に検出する。
【解決手段】撮像センサにより撮像した車両周囲画像100〜103中の物体の形状に基づいて固定物111、112を抽出した後、抽出した固定物111、112のΔt後の画像101〜103中の位置の変化に基づいて車両の前進状態又は後進状態を判定する。
(もっと読む)
車体挙動測定装置
【課題】路面を撮影することにより、車体の振動、傾斜、車高、車速、方向変化等の、車体の挙動を高速で且つ正確に測定する車体挙動測定装置を得る。
【解決手段】路面撮影部5では路面に投射した格子像12等の所定の画像を撮影し、画像処理部13を経て解析演算部14でこれを解析し、相似形の変化により車高を検出し、1車輪側または1車軸側等のゆがみにより車体の傾斜を検出し、特定車輪や車軸方向へのぶれにより車体振動を検出する。また、路面を撮影した路面上の特徴点の画像の解析演算を行い、その際別途得た車体振動データにより補正を行い、それにより路面の特徴点の長さによって車速を測定し、路面の特徴点の方向変化により車両の方向変化を測定する。車体振動データとしては、路面に投影した格子枠画像の振動データを利用することにより、正確な車体振動補正用信号が得られ、正確な車速等のデータを得ることができる。
(もっと読む)
タイヤ幅判別装置、進行方向判別装置、および車種判別装置
【課題】車種判別に必要な要素であるタイヤ幅や、進行方向などの検出精度を高めること。
【解決手段】走行車線の路面に、車両の進行方向に対して斜めに第1の踏板15aを配置するとともに、第1の踏板15aと平行に、第2の踏板15bを配置し、第1の踏板15aによって踏付けが検出された踏付検出期間と第2の踏板15bによって踏付けが検出された踏付検出期間との時間的な重なり具合に基づいて、走行車線を走行する車両10のタイヤ幅を判別するタイヤ幅判別装置であって、第1の踏板15aおよび第2の踏板15bによって検出された踏付検出期間を補正する補正部を備え、補正部による補正後の踏付検出期間を用いてタイヤ幅を判別する。
(もっと読む)
揺動装置
【課題】揺動装置の揺動を検知するセンサの位置決めの精度があまり高くなくてもよく、個数も少なくてすむようにする
【解決手段】水平方向に揺動する上部フレーム10と、上部フレーム10に取り付けられ光を反射する、第一の幅W1を有する第一反射部14a、14cと、上部フレーム10に取り付けられ光を反射する、第二の幅W2(>W1)を有する第二反射部14b、14dと、第一反射部14a、14cおよび第二反射部14b、14dに光を与える発光体および発光体により与えられ第一反射部14a、14cおよび第二反射部14b、14dにより反射された光を受光する受光体を有するセンサ(フォトカプラ)34とを備えた揺動装置1であって、第一反射部14a、14cと、第二反射部14b、14dとは水平方向に配列されている。
(もっと読む)
車両の進行方向判定装置
【課題】簡単且つ適切な手段によって車両の進行方向を確実に判定し得る車両の進行方向判定装置を提供する。
【解決手段】車両の少なくとも一つの車輪(TR)に関し、スリップ角取得手段M2が取得したスリップ角と操舵トルク取得手段M1が取得した操舵トルクとを、比較手段M3にて比較し、その比較結果に基づき車両の進行方向を判定する。少なくとも車両の前進時における車輪のスリップ角と操舵トルクの対応関係を予め特定し、その対応関係を記憶する対応関係記憶手段M31を備え、これに記憶された対応関係と、上記の取得スリップ角及び操舵トルクの関係とを比較するように構成するとよい。
(もっと読む)
移動物体検出フォトインタラプタ、及びそれを用いた電子機器
【課題】部品点数の増加、構造の複雑化等を招くことなく、移動物体の移動方向を検出することが可能な移動物体検出フォトインタラプタを提供する。
【解決手段】発光チップ3の1つの発光素子と受光チップ4の2つの受光素子4a、4bの組み合わせにより、移動物体11の有無だけではなく、移動もしくは移動方向をも検出することができ、従来の様に2組の発光素子と受光素子を用いる場合と比較すると、発光素子の個数が減る。この発光素子の個数の減少に伴い、1つの発光素子、2つの受光素子、及び演算回路4cを一体化しても、この移動物体検出フォトインタラプタ1の大型化を抑えることができ、この移動物体検出フォトインタラプタ1の一体化を容易に図ることができる。このため、部品点数の増加、構造の複雑化、設計の複雑化、設置スペースの増大、組立及び調整作業の複雑化、コストの増大等を抑えることができる。
(もっと読む)
移動状態検出装置
【課題】移動体の加速、減速にかかわらず、常に正確に移動体の移動状態を判定することができる移動状態検出装置を提供することを目的とする。
【解決手段】本発明は、移動体速度を算出する速度算出部、例えばGPS受信機2と、移動体の進行方向に対する運動加速度を検出する加速度センサ3と、移動体の前進、後退を判定する移動状態判定部6とを備え、移動状態判定部6が移動体の運動加速度を単位時間だけ積分した値と、前記単位時間における移動体速度の大きさの差分とに基づいて移動体の前進、後退を判定することを特徴とする。これにより、移動体の加速、減速にかかわらず、常に正確に移動体の前進、後退を判定することができる。また、この情報とGPS速度から正確な方位を得ることができる。
(もっと読む)
変位方向検出装置
【課題】粘弾性部材を用いて、移動部材20が固定部材11、12に対して少なくとも直交2軸方向へ相対変位する場合に、移動部材20の相対変位方向を検出することができる変位方向検出装置を提供する。
【解決手段】上側固定部材11と移動部材20との間に第1粘弾性部材31を配置し、下側固定部材12と移動部材20との間に第2粘弾性部材32を配置する。そして、第1粘弾性部材31のインピーダンスZ1と第2粘弾性部材32のインピーダンスZ2との差に基づき、移動部材20が上下方向へ変位したのか、それとも、左右方向へ変位したのかを判断する。
(もっと読む)
距離測定による通過方向判別装置
【課題】本発明による距離測定による通過方向判別装置の課題は、複数の通過体が重複して通過する場合においても、個々を区別した状態で通過体の通過方向を検知することが可能なものを提供することにある。
【解決手段】検出信号を発生する検出信号発生器と通過体による前記検出信号の反射信号を受信する受信器との対からなる複数個の検出ユニット、又は、検出信号を発生する1個の検出信号発生器と前記検出信号発生器を共用し、通過体による前記検出信号の反射信号を受信する複数の受信器による複数個の検出ユニットと、距離差計算器と、応答順判定器と、方向及び個判定器とを有することを特徴としている。
(もっと読む)
船艇の速度検出装置
【課題】 1つの装置で速度と前進/後進識別とができる船艇の速度検出装置を提供することを課題とする。
【解決手段】 図(a)は8枚羽根パドル50の側面図であり、前記パドルの羽根は、センサ33で検出するパルスパターンが回転方向によって変わるように磁化羽根42a〜42cと非磁化羽根43a〜43eを配置する。(b)、(c)はそれぞれ船艇の前進/後進時におけるパルスパターンであり、特定の磁化羽根により互いに異なるパルス間隔T、T1、T2のパルスを発生する。演算部44は、パルス間隔Tと次のT1又はT2によって船艇の前進/後進を認識し、船艇の速度演算は、あるパルス間隔Tを基準にしてTの発生周期T0を求め、T0に基づいてパドルの回転速度を算出し、船艇の速度を演算する。
【効果】本発明方法は、パドルの回転によって速度を検出し、加えて、パドルの回転方向によって船艇の進行方向を判定することができる。
(もっと読む)
移動方向検出装置
【課題】 荷重センサにより検出された荷重データに基づき、検出対象の移動方向を検出することができ、移動方向によって信号を出力したりしなかったりすることができる。
【解決手段】 検出用基板2と、検出用基板2の裏面に設けられ、検出対象の検出用基板2に対する荷重を検出する複数の荷重センサGと、各荷重センサGによる検出用基板2における第1荷重点の荷重データ、および第1荷重点の次に加わる第2荷重点の荷重データに基づき、検出用基板2上における検出対象の移動方向を演算する移動方向演算部6とを有する。
(もっと読む)
移動体検知センサ
【課題】 空間における特定方向への物体の移動を検知できるとともに、空間における物体の有無の判定に利用可能な信号を出力できる、小型且つ低コストの移動体検知センサを提供する。
【解決手段】 n個(nは2以上の整数)の受光器PD1〜PD3、及び、各受光器PD1〜PD3の出力信号の変化に応じてパルス信号を出力する信号出力回路14を半導体チップ上に実装する。各受光器の受光面は物体が移動する空間に面して一列に配置する。物体が受光面の近傍を順方向に通過すると、1番目からn番目まで受光面が順に遮光され、m番目(2≦m≦n)の受光面が遮光された時点で出力端OUTにパルス信号が出力され始める。その後、物体の通過に従って各受光面に光が再び入射し始め、p番目(2≦p≦n)の受光面に光が入射するようになった時点でパルス信号の出力が停止される。一方、物体が逆方向に通過してもパルス信号は出力されない。
(もっと読む)
1 - 17 / 17
[ Back to top ]