
Fターム[2F051AB05]の内容
特定の目的に適した力の測定 (5,882) | 力の検出手段 (2,017) | 磁気的 (353)
Fターム[2F051AB05]に分類される特許
1 - 20 / 353
直動アクチュエータ用の磁気式荷重センサおよび直動アクチュエータ
【課題】直動アクチュエータに組み込んで使用したときにヒステリシス誤差が生じにくく、かつ、直動アクチュエータの軸方向長さを抑えることが可能な直動アクチュエータ用の荷重センサを提供する。
【解決手段】直動アクチュエータが対象物22に印加する軸方向荷重の大きさを検出する直動アクチュエータ用の磁気式荷重センサにおいて、軸方向荷重の反力をスラスト軸受41を介して受けてたわみを生じるフランジ部材2と、磁界を発生する磁気ターゲット4と、その磁気ターゲット4に対する相対位置がフランジ部材2のたわみにより変化するよう配置された磁気センサと5を有し、フランジ部材2の軸方向端面にスラスト軸受41の転動体41Bが転がり接触する溝10を形成する。
(もっと読む)
電動アシスト装置

【課題】ハウジングを組み立てるべく、それぞれが合成樹脂製である第一、第二両ハウジング素子同士を結合した状態で、これら第一、第二両ハウジング素子同士の同軸度を十分に確保できる構造を実現する。
【解決手段】前記第一ハウジング素子16aの端部に円環状の第一芯合わせ用金具35を、インサート成形により、この第一ハウジング素子16aと同心に固定する。前記第二ハウジング素子17aの外周部に円環状の第二芯合わせ用金具36を、インサート成形により、この第二ハウジング素子17aと同心に固定する。そして、前記第一、第二両芯合わせ用金具35、36同士を嵌合させた状態で、前記第一、第二両ハウジング素子16a、17a同士を、複数本のボルト18、18により結合する。
(もっと読む)
計測装置、モータ装置、及びロボット装置
【課題】出力されるトルクを計測する。
【解決手段】計測装置は、回転子SFの周面の少なくとも一部に掛けられる伝達部BTを用いて駆動動作及び復帰動作を行う駆動部30によって駆動される回転子SFに加えられるトルクを計測する計測部、を備える。
(もっと読む)
歯車伝達装置用トルク測定装置と駆動系制御装置と転がり軸受の予圧測定方法
【課題】実用的な構造で、エンジン1の出力トルクを測定し、経年劣化したり、指定以外の燃料を給油されたエンジン1でも、それぞれの状態に応じた最適な制御を行える構造を実現する。
【解決手段】変速機2の伝達するトルクを求めるトルク測定器4を備える。このトルク測定器4は、前記エンジン1のクランクシャフトと比例したトルクで回転する、回転軸を支持する転がり軸受の内輪に支持固定されたエンコーダと、固定の部分に支持された状態で、検出部をこのエンコーダの被検出面に対向させたセンサと、このセンサの出力信号に基づいて前記回転軸のトルクを算出するトルク演算器とを備える。そして、エンジン制御器3は、このトルク演算器が算出したトルクの値に基づいて、前記エンジン1への燃料供給量を調整したり、前記変速機2の変速比を調節する。
(もっと読む)
自転車用の力測定装置
【課題】自転車のクランク軸に及ぼされる力を正確に測定する力測定装置を提供する。
【解決手段】自転車用の力測定装置100は、ボトムブラケットシェル46とスピンドルの間に配置された第1のハーフシェル外壁21および内側管状壁22を有するスリーブシェル2と、内側管状壁22に接するように配置され、スピンドルに及ぼされる踏む力に対応して歪むことで変位するように構成された応用変形領域323を有するリング本体32と、センサ作動区域313を画定するセンサ保持ユニット31と、センサ作動区域313に配置されたセンサ331および磁性部材332を含むホール検出ユニット33を含んでおり、歪みによる変位によってこの磁性部材332の位置がずれることで、それにより生成される磁場を変えることにより踏む力の大きさを表す信号を発する。
(もっと読む)
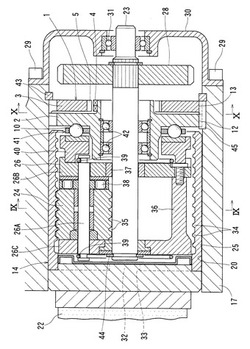
電動ブレーキ装置
【課題】摩擦パッドの押圧力を検出するためのセンサが、摩擦パッドとブレーキディスクの間の摩擦熱の影響を受けにくく、安定した精度で摩擦パッドの押圧力を検出することができる電動ブレーキ装置を提供する。
【解決手段】回転軸10の回転を外輪部材12の直線運動に変換する直動機構を有し、外輪部材12で摩擦パッド8を押圧してブレーキディスク2に押さえ付ける電動ブレーキ装置1において、外輪部材12で摩擦パッド8を軸方向前方に押圧したときに作用する軸方向後方への反力を受け止める反力受け部材14を設け、その反力受け部材14の軸方向後方に固定部材35を設け、反力受け部材14に磁極列37を設け、固定部材35に磁気センサ38を設ける。
(もっと読む)
荷重測定装置
【課題】エンコーダ4bの被検出面に対向させたセンサの出力信号の変化から、転がり軸受ユニットを構成する外輪とハブとの間に作用する荷重を求める為の演算を、少ない計算量で行なえる構造を実現する。
【解決手段】上記エンコーダ4bの被検出面に存在するN極に着磁された部分とS極に着磁された部分との境界の形状を、所定の曲線形状とする。この様な構成を採用する事により、上記出力信号の変化量と上記荷重の変化量との間に直線関係を成立させる事で、上記課題を解決する。
(もっと読む)
力覚センサ
【課題】各軸の相互間の干渉による検出誤差を小さくし、対象とする力及びモーメントを高精度で検出できる力覚センサを提供する。
【解決手段】力覚センサ100は、台座部材101と、台座部材101に相対して配置され、外力が作用して変位する作用部材102と、作用部材102の変位を検出する変位検出部とを備えている。また、力覚センサ100は、台座部材101に相対して配置された剛性部材103を備えている。更に、力覚センサ100は、台座部材101に対して垂直方向に延び、軸線Lまわりに等間隔に配置され、台座部材101と剛性部材103とを連結する柱状弾性部材105a〜105dを備えている。更にまた、力覚センサ100は、軸線Lまわりに等間隔に配置され、作用部材102と剛性部材103とを連結する弾性部104A〜104Dを備えている。各弾性部104A〜104Dは、水平方向に延びる一対の梁状弾性部材からなる。
(もっと読む)
変位量検出装置
【課題】可動部に対する負荷が失われた時点で、可動部を初期位置の近傍まで戻すことができ、しかも、負荷が失われてから短時間で、可動部を完全に初期位置まで戻すことができる変位量検出装置を提供する。
【解決手段】センサヘッド48を備える固定部14と、固定部14に固定した弾性体15で支持される可動部16とを備える。可動部16に設けたセンサロッド49の変位量をセンサヘッド48で検出する。弾性体15を、固定部14で片持梁状に支持した前後一対の板バネ23・24で構成する。板バネ23・24の固定端および可動端を、それぞれブロック状のスペーサ25・31を間にして締結する。板バネ23・24の少なくとも一方の幅寸法を、板バネ23・24の固定端および可動端における締結領域57・59の幅寸法より大きく設定する。板バネ23・24の少なくとも一方に、締結領域57・59からはみ出る自由変形部60を設ける。
(もっと読む)
信号処理回路及び転がり軸受装置
【課題】変位センサのセンサヘッドとしてのコイルに接続される信号処理回路において、互いに対向して離れた位置にある一対のコイルの温度差が、変位検出に与える影響を排除する。
【解決手段】この信号処理回路3は、変位の被検出体を挟んで互いに対向配置された一対のコイル21,22に対して、交流に直流バイアスを付加した駆動信号を与える駆動信号回路31と、一対のコイル21,22からの出力の交流成分に基づいて被検出体の変位に基づく信号を検出する信号検出回路32と、一対のコイル21,22からの出力の直流成分に基づいて当該コイル間の温度勾配を求め、当該温度勾配に基づいて信号検出回路32の出力を補正する温度補正回路33とを備えたものである。
(もっと読む)
予圧関連量測定装置付回転機械
【課題】アンギュラ玉軸受9a〜9dに付与されている予圧荷重を測定可能な構造を実現する。
【解決手段】主軸8の一部で、1つのアンギュラ玉軸受9cを構成する内輪15cを軸方向両側から挟む位置に、1対のエンコーダ5a、5bを外嵌する。これら両エンコーダ5a、5bの外周面の磁気特性を、円周方向に関して交互に変化させると共に、円周方向に隣り合う異なる磁気特性同士の境界を軸方向に対して傾斜させる。ハウジング7に支持した1対のセンサユニット6a、6bを構成するセンサ21a、21bの検出部を、前記両エンコーダ5a、5bの外周面に対向させる。この状態で、前記予圧荷重が変化する事に伴い、前記各部材5a、5b、15cの軸方向の圧縮ひずみが変化すると、前記両センサ21a、21bの出力信号間の位相差が変化する。そこで、図示しない演算器に、この位相差に基づいて、前記予圧荷重を算出する機能を持たせる。
(もっと読む)
力覚センサ、ロボット装置、ロボットハンド及び検出装置
【課題】温度センサを用いずに、磁石及び磁電変換素子の特性の変動に追従して、磁電変換素子の出力電圧を補正する。
【解決手段】外枠3に弾性体2を介して作用部1が支持されている。この作用部1に外力が作用することにより作用部1が外枠3に対して変位する。外枠3の内部には、外枠3に一体に固定された永久磁石8が配置されている。この永久磁石8の一方の磁極面8aに対向するようにn個の第1のホール素子6a〜6dが配置されている。また、永久磁石8の他方の磁極面8bに対向するようにn個の第2のホール素子9a〜9dが配置されている。各ホール素子6a〜6dには、定電流源及び電圧検出部が接続されている。そして、各電圧検出部により検出されたホール電圧の電圧値の絶対値の総和の電圧値が求められ、総和の電圧値が予め定めた基準電圧値となるように、各定電流源の電流値が調整される。
(もっと読む)
回転機械用物理量測定装置
【課題】エンコーダ1aと組み合わせて使用するセンサ10、10の個数を、3個のみと、少なくした状態で、前記エンコーダ1aを外嵌固定した回転部材の5方向の変位x、y、z及び傾きφx、φzを測定できる構造を実現する。
【解決手段】前記エンコーダ1aとして、被検出面である外周面に、複数の特性変化組み合わせ部3a、3aを円周方向に等ピッチで形成したものを使用する。これら各特性変化組み合わせ部3a、3aは、前記エンコーダ1aの軸方向に対して互いに逆方向に傾斜した第一凹溝11a及び第二凹溝11bから成るものとする。前記エンコーダ1aの外周面のうちで円周方向の位相が互いに異なる部分に、3個のセンサ10、10の検出部を対向させる。これにより、これら各センサ10、10の出力信号から得られる情報に基づいて、前記5方向の変位x、y、z及び傾きφx、φzを算出可能とする。
(もっと読む)
回転部材用物理量測定装置
【課題】回転部材が高速回転する状態での物理量の算出処理に異常が発生する事を防止しつつ、この物理量の測定に関する応答性を、前記回転部材の総ての回転速度範囲で十分に確保できる構造を実現する。
【解決手段】エンコーダ1aの被検出面に設けた複数の特性変化組み合わせ部3a1、3a2、3a3を構成する第一透孔11a1、11a2、11a3のピッチを、円周方向に関してα、β、γ(α<β<γ)の順で繰り返し変化させる。前記回転部材の回転速度が低い状態では、総てのピッチα、β、γ部分で取得したセンサ情報に基づいて物理量の算出を行う。又、前記回転速度が中程度の状態では、一部のピッチβ、γ部分で取得したセンサ情報のみに基づいて物理量の算出を行う。更に、前記回転速度が高い状態では、より少ない一部のピッチγ部分で取得したセンサ情報のみに基づいて物理量の算出を行う。
(もっと読む)
回転部材用物理量測定装置
【課題】回転部材の変位量とこの回転部材に作用する荷重とのうちの少なくとも一方の物理量を測定する為に使用する、エンコーダ1aの被検出面に対向させたセンサの出力信号に基づいて、前記回転部材の回転速度を精度良く測定できる構造を実現すべる。
【解決手段】前記エンコーダ1aの被検出面に設けた各特性変化組み合わせ部3a、3aを構成する1対の透孔11a、11bのうち、一方の透孔11aを前記被検出面の幅方向に形成し、他方の透孔11bをこの幅方向に対して傾斜した方向に形成する。このうちの一方の透孔11a、11aに基づいて発生するパルス間の周期L(L1、L2)に基づいて、前記回転部材の回転速度を測定する。
(もっと読む)
回転軸用アキシアル荷重測定装置の検定方法及び検定装置
【課題】使用開始後に、主軸2等の回転軸に加わるアキシアル荷重と、このアキシアル荷重を求める為に設けたセンサユニット7の出力信号との関係を検定する方法及び装置を実現する。
【解決手段】前記主軸2の先端面と、この先端面に対向する部分に設けた保持部材13との間に、荷重測定装置14と、保持ケース15と、複列玉軸受ユニット19等によりこの保持ケース15に回転自在に支持された荷重伝達軸16とを設ける。この荷重伝達軸16に前記主軸2の端部を押し付けつつこの主軸2を回転させた状態で、前記センサユニット7の出力信号を取得する。そして、この出力信号と前記荷重測定装置14の測定値との関係に基づき、この出力信号とアキシアル荷重との関係の適否を判定する。
(もっと読む)
電動ブレーキ装置
【課題】摩擦パッドの押圧力を検出するためのセンサが、摩擦パッドとブレーキディスクの間の摩擦熱の影響を受けにくい電動ブレーキ装置を提供する。
【解決手段】回転軸11の外径面に転がり接触する複数の遊星ローラ12と、軸方向移動を規制されたキャリヤ14と、軸方向に移動可能な外輪部材13と、外輪部材13の軸方向前端に配置された摩擦パッド8とを有し、回転軸11の回転を外輪部材13の軸方向移動に変換し、その外輪部材13で摩擦パッド8を押圧する電動ブレーキ装置1において、外輪部材13で摩擦パッド8を押圧したときに外輪部材13に作用する軸方向後方への反力を受け止める反力受け部材15を外輪部材13の軸方向後方に設け、その反力受け部材15の変位を測定する変位センサ38を設ける。
(もっと読む)
車両用左右輪支持ユニット
【課題】左右の車輪をそれぞれ支持する荷重測定装置付転がり軸受ユニット同士で、演算器に入力するゲイン特性を統一して、これら各荷重測定装置付転がり軸受ユニットの取り扱い性を向上させる。
【解決手段】右車輪を支持する為の荷重測定装置付転がり軸受ユニットに組み込む右車輪用エンコーダ11と、左車輪を支持する為の荷重測定装置付転がり軸受ユニットに組み込む左車輪用エンコーダ12とで、それぞれの被検出面の特性が変化する状態を異ならせる。即ち、車両への組み付け状態で、上記両エンコーダ11、12の被検出面の特性が変化する境界の形状(透孔と柱部との境界である「く」字形)を、左右の荷重測定装置付転がり軸受ユニットの中央部に存在する、仮想平面αに関して鏡面対称とする。これにより、上記課題を解決できる。
(もっと読む)
タイヤに作用する力の推定方法
【課題】タイヤに作用する前後力、横力、上下力の推定精度を向上させる。
【解決手段】一方側のサイドウォール部3Aに、同一円周線j上で間隔を隔てて取り付く3個以上n個の歪センサ10を用いる。歪センサ10は、磁石11と磁気センサ素子12とを有し、ゲイン最大線Nの角度θは20〜70°しかも各ゲイン最大線Nが同一方向に傾斜する。所定のタイヤ回転角度位置Qにおいて、各歪センサ10によってタイヤ歪を同時に測定することによりn個のセンサ出力V1〜Vnをうる歪測定ステップと、それを変位距離L1〜Lnに換算する変位距離換算ステップと、個のn個の変位距離L1〜Lnに基づいて、タイヤに作用する力の推定値を求める演算ステップとを含む。
(もっと読む)
タイヤに作用する力の推定方法
【課題】タイヤに作用する前後力、横力、上下力の推定精度を向上させる。
【解決手段】一方、他方のサイドウォール部に、各n個の第1、第2の歪センサを周方向に等間隔を隔てて取り付ける。ゲイン最大線は45°の角度θで周方向一方側に傾斜する。所定のタイヤ回転角度位置Qにおいて、第1、第2の歪センサによってタイヤ歪を同時に測定する。前後力Fxは、第1の歪センサのn個の出力VAの平均値NVAと、前記第2の歪センサのn個の出力VBの平均値NVBとの和(NVA+NVB)を変数とした推定式にて推定する。横力Fyは、平均値NVA、NVBの差(NVA−NVB)を変数とした推定式にて推定する。上下力Fzは、前方側領域に配される第1、第2の歪センサのセンサ出力VFの平均値NVFと、後方側領域に配される第1、第2の歪センサのセンサ出力VRの平均値NVRとの差(NVF−NVR)を変数とした推定式にて推定する。
(もっと読む)
1 - 20 / 353
[ Back to top ]