
Fターム[2F062GG38]の内容
機械的手段の使用による測定装置 (14,257) | 測定機器 (1,459) | エンコーダ (142) | ロータリーエンコーダ (66)
Fターム[2F062GG38]に分類される特許
61 - 66 / 66
削岩機の位置を測定する装置を備えた削岩装置及び削岩リグ

本発明は、掘削時にドリルポイントが突き出るドリル端部(41)と、前記ドリル端部(41)に対向する後端部(42)とを有する送りビーム(4)、送りビーム(4)に沿って移動可能な削岩機(5)、及び送りビーム(4)に配置され、一端(622)が送りビーム(4)に対して移動可能であり、他端(611)が送りビーム(4)に対して固定して設けられる圧力シリンダ(6)を有する削岩装置に関する。前記圧力シリンダ(6)は送りライン(51)を駆動し、削岩機(5)を送りビーム(4)に沿って往復移動させる。送りライン(51)は、送りビーム(4)の各端部(41,42)に設けられた二つの外側滑車(52,53)上を通る。送りビーム(4)に対する削岩機(5)の位置を測定するための測定装置(7)が、外側滑車(52,53)の一方の軸(9)に設けられ、測定装置(7)が設けられる滑車(52;53)及び軸(9)は一緒に回転するように構成されている。 (もっと読む)
線条体計尺方法及び線条体計尺装置並びに線条体の製造方法

【課題】線条体を計尺ローラに巻付けてその回転量で線条体を計尺するのに、線条体の線径を測定することなく精度のよい計尺が行なえる線条体計尺方法及び線条体計尺装置を提供する。
【解決手段】線条体11を計尺ローラに巻付けて走行させ、計尺ローラの回転量を計測して線条体の長さを計尺するのに、線条体11を巻付径が異なる2つの計尺ローラ12,13に巻付けて走行させ、2つの計尺ローラ12,13の回転量を計測して線条体11の長さを計尺する。2つの計尺ローラ12と13の回転量が、それぞれN1とN2(N1>N2)であるとき、計尺ローラ上を走行する線条体11の走行量Lは、kを定数として、
L=(kN1N2)/(N1−N2) により算出する。
(もっと読む)
路面断面プロファイルの測定方法
【課題】 測定路面の両端の一定長さが平坦でなくても測定路面の全範囲において簡易かつ精度良くプロファイル測定が可能な路面断面プロファイルの測定方法を提供する。
【解決手段】 測定ブロック10の長さの異なる第1及び第2連結棒14,15が真直状態での第1ローラ11及び第3ローラ13の中心間寸法を基準距離として、基準距離を複数点に分割した複数の計測位置を決める。測定ブロックが路面の縦方向に進行し、第3ローラが計測位置を順次移動する毎に、各計測位置にて第1及び第2連結棒のなす連結角をロータリエンコーダにより検出する。連結角検出値から路面のプロファイルを推定する。さらに、路面のプロファイルを評価する評価関数を設定し、この評価関数を共役勾配法等の演算手法を用いて最小化することにより、路面全体の精密な断面プロファイルを得ることができる。
(もっと読む)
改良径の測定装置及び改良径の測定方法
【課題】改良体の径を正確かつ容易に測定することのできる改良径の測定装置及び改良径の測定方法を提供する。
【解決手段】地盤G中に、硬化材を噴射させて混合攪拌することによって造成される改良体Kの径を測定する改良径の測定装置1は、地盤G内に貫入されるケーシング2と、このケーシング2の内部に挿入されて、その下端部がケーシング2の内部から水平方向に延出するとともに改良体Kと未改良地山との境界面へと貫入もしくは接触される棒状部材3と、棒状部材3を境界面へと貫入もしくは接触させる送り込み装置4と、棒状部材3の先端部に設けられて、境界面における荷重変化、温度変化又はPH変化のうち少なくともいずれか一つを検出する検出センサ5と、この検出センサ5によって境界面が確認された際の棒状部材3の水平方向における改良体Kへの貫入量に基づいて改良体Kの径を測定する測定手段とを備えている。
(もっと読む)
レンズ偏心測定装置及びレンズ偏心測定方法
【課題】レンズ、特に小径レンズの偏心を迅速、かつ高精度に測定できるレンズ偏心測定装置等を提供すること。
【解決手段】接触子の変位量を検出するレーザ変位計112からの出力信号を電気信号に変換するD/Aコンバータ205と、D/Aコンバータ205からの出力信号S1の周波数成分を電圧に変換するF/Vコンバータ206と、F/Vコンバータ206からの出力信号S2と第1の閾値S3とを比較する第1比較器207と、出力信号S1の直流成分を抽出する直流成分抽出回路216と、出力信号S1と出力信号S5との差分を算出する減算器213と、減算器213からの出力信号S6と第2の閾値S7とを比較する第2比較器215と、第1比較器207の出力信号S4と第2比較器215の出力信号S8とに基づいて、接触子111の移動量を制御する制御部202とを有する。
(もっと読む)
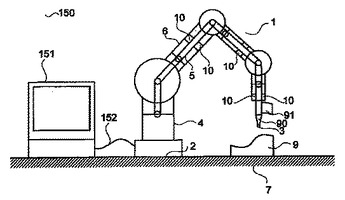
外骨格を有するCMMアーム
ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
 (もっと読む)
(もっと読む)
61 - 66 / 66
[ Back to top ]