
Fターム[2F062GG38]の内容
機械的手段の使用による測定装置 (14,257) | 測定機器 (1,459) | エンコーダ (142) | ロータリーエンコーダ (66)
Fターム[2F062GG38]に分類される特許
41 - 60 / 66
ワイヤ式三次元座標測定機

【課題】簡易な構造で、被測定物の平面度や形状を測定するワイヤ式三次元座標測定機を提供するものである。
【解決手段】スタンド1の上部にリニアスケール4を取付けた水平アーム3を設け、このリニアスケール4上を水平に移動するリードヘッド30の先端にワイヤ8を接続し、水平アーム3の先端に、リニアスケール4から引出されたワイヤ8が通過する回転ガイド5と、これに回動自在に接続された角度ガイド6とからなるワイヤガイド器7を設け、前記回転ガイド5に角度ガイド6の回転角度を検出する中空エンコーダ33を設け、回転ガイド5と角度ガイド6とを回動自在に接続する軸30に、ワイヤ8の曲がり角度を検出するエンコーダ42を設けると共に、先端子10の座標を演算する座標演算器を設けて、被測定物12に接触させた先端子10の位置座標を演算するようにしたものである。
(もっと読む)
関節部曲げ測定装置および曲げ測定方法

【課題】関節部曲げ測定装置を簡単な構成により小型化が可能で適用範囲が広く容易に機械的要素に対する安全性評価試験のデータを得ることができるようにする。
【解決手段】関節部曲げ測定装置10は、棒状の測定子本体部11と、この測定子本体部11の先端部にジョイント部19を介して回動可能に設けられた変位測定子12と、装置基体部15内に設けられたポテンショメータ13と、変位測定子12およびポテンショメータ13を連結する計測用ワイヤ14とを備える。計測用ワイヤ14は、測定子本体部11および変位測定子12に設けられた溝部17内に配されている。変位測定子12の角度変位量は、計測用ワイヤ14の移動量によりポテンショメータ13にて検出され、角度変換によって算出される。関節部曲げ測定装置10は、構成が簡単で小型化が図れるため、幼児の指先のような小さな部位を想定することができる。
(もっと読む)
バックラッシュ量算出方法および直動型ロボット装置
【課題】 上下軸に配置されたラックとピニオンにおいて、重力の影響を受けずバックラッシュ量を容易に精度よく測定できる方法および直動型ロボット装置を提供する。
【解決手段】 本発明の直動型ロボット装置のバックラッシュ量算出方法は、減速機7を有したサーボモータ6と、減速機の出力軸に結合されたピニオン3と、上下方向に設けられピニオンに噛合するラック2と、サーボモータを保持しラック上を移動する移動体8と、サーボモータに設けられたトルクおよび回転位置を検出する検出部と、サーボモータを制御する制御部とを備え、サーボモータを回転させて移動体を下方向に移動させ、移動体より下に設けた固定台5に移動体を預けてトルクがゼロになったときからトルクの方向が逆転するまでの間の検出部の回転位置パルス値を用いることによりラックとピニオンのバックラッシュ量を算出するものである。
(もっと読む)
往復動内燃機関のシリンダ直径計測器
【課題】往復動内燃機関のシリンダ直径を精度良く、かつ、容易に計測できる往復動内燃機関のシリンダ直径計測器。
【解決手段】往復動内燃機関のシリンダ101の軸芯O1 上に設けたガイド2と、該ガイド2を保持する支持体3と、前記ガイド2に摺動自在に挿入した支持棒4と、前記シリンダ101の軸芯O1 と交差するように前記支持棒4に取り付けた測長器5より成り、且つ前記測長器5を、棒状の測長器本体6と、該測長器本体6の先端部に設けた接触又は非接触式でかつ測定距離を電気信号に変換して出力する変位変換器7により形成する。
(もっと読む)
絶対角検出方法及び絶対角検出装置
【課題】回転角度センサの誤差が絶対角に反映されにくい絶対角検出方法及び絶対角検出装置を提供する。
【解決手段】第1比例定数と、回転角θcaと回転角θcbとの差とを用いて演算し仮の絶対角KΦを求め、回転角θcaと第2比例定数とを用いて演算しメイン歯車2のシャフト回転角φacを求め、仮の絶対角KΦから回転角度センサ6におけるセンサ周期Θの繰り返し回数Ncaを求め、シャフト回転角φac及びセンサ周期Θとセンサ周期Θの繰り返し回数Ncaとから絶対角Φを求める。
(もっと読む)
携帯型計測装置
携帯型計測装置のための方法及びシステムが記載される。本発明の1実施形態は、第1のリンクと、第1の自由度で移動するように動作可能な第1の連結器によって第1のリンクと連結される第1のプローブと、第2の自由度で移動するように動作可能な第2の連結器によって第1のリンクと連結される第2のプローブと、第1の連結器の動作と関係付けられる第1のセンサ信号を出力するように動作可能な第1のセンサと、第2の連結器の動作と関係付けられる第2のセンサ信号を出力するように動作可能な第2のセンサとを有する装置である。また、実施形態は、第1及び第2のセンサと連絡するプロセッサであって、第1のセンサ信号及び第2のセンサ信号を受信し、且つ少なくとも部分的に第1のセンサ信号及び第2のセンサ信号に基づいて第1のプローブと第2のプローブとの間の距離を判断するように動作可能なプロセッサを有する。  (もっと読む)
(もっと読む)
ベルト外周長の測定方法
【課題】ベルト外周長を正確に測定することができるベルト外周長の測定方法を提供する。
【解決手段】ワイヤー1を引き出し自在に収容すると共にワイヤー1の引き出し長さを計測するワイヤーエンコーダー2を用いる。そして回転軸3に懸架されたベルト4にワイヤー1の先端を治具5で取り付け、回転軸3を駆動してベルト4を一周走行させると共に、ワイヤーエンコーダー2から引き出されたワイヤー1をベルト4の外周に一周巻き付ける。このときのワイヤー1の引き出し長さをワイヤーエンコーダー2で計測することによって、ベルト4の外周長を測定する。ベルト4に巻き付けたワイヤー1の引き出し長さをワイヤーエンコーダー2で計測することによって、ベルト4の外周長を自動的に測定することができ、スリップなどの問題なく、ベルト外周長を正確に測定することができる。
(もっと読む)
絶対位置測定装置
【課題】小型化を容易に図れ、製造上の負担を軽減でき、スピンドルの絶対位置を測定可能な絶対位置測定装置を提供すること。
【解決手段】スピンドル3の回転量を第1の周期で変化する位相信号として検出する第1のロータリーエンコーダと、スピンドル3の回転量を第2の周期で変化する位相信号として検出する第2のロータリーエンコーダとを備える。第1のロータリーエンコーダの第1のロータ42の回転は、第1の回転円筒43の外周に形成された第1の歯車48と、第2の回転円筒52の外周に形成された第2の歯車55とに噛合する中継歯車53によって、第2のロータ51に伝達される。従って、二つの異なる周期の位相信号に基づいてスピンドルの絶対位置を算出できる。また、従来のようなスピンドルの螺旋状のキー溝を設ける必要がなく、小型化を容易に図れる。また、製造上の負担を軽減させることができる。
(もっと読む)
走査ヘッドの較正装置および方法
電動の関節式走査ヘッド(16)における角度測定スケールを、基準加工品(40;60;80)を用いて較正する方法が記載される。この方法は、走査ヘッド(16)に取り付けられた走査プローブ(28)などの表面検出デバイスを走査ヘッド(16)の少なくとも1軸(A1,A2)のまわりに回転させ、基準加工品(40;60;80)に対し異なる複数の角度方向に表面検出デバイスを移動させる工程を含む。次に、その異なる角度方向のそれぞれで、表面検出デバイスにより、基準加工品(40;60;80)の少なくとも1つの特性を測定する工程が実行される。そして、測定された基準加工品(40;60;80)の特性を用い、また付加的に既知または較正済みの基準加工品(40;60;80)の特性を用いて、走査ヘッドの少なくとも1つの測定スケールに対する誤差マップまたは関数を生成する。この方法は、走査ヘッド(16)を移動させるために、座標測定機械(14)などの座標位置決め機械の使用を含むことができる。基準加工品(40;60;80)は、単一の特徴部または配列された複数の特徴部(46;66)を含むことができる。 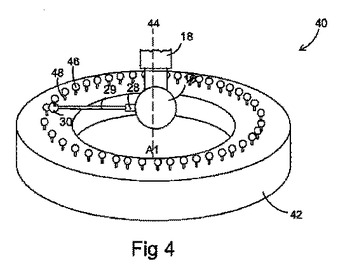 (もっと読む)
(もっと読む)
光ファイバ担持用スペーサの反転ピッチ及び反転角度の測定装置及び測定方法
【課題】螺旋溝の反転ピッチ及び反転角を正確に測定することができる光ファイバ担持用スペーサの反転ピッチ及び反転角度の測定装置及び測定方法を提供する。
【解決手段】測定装置は、反転角エンコーダ55からの角度信号のカウンタ値が加算からθ(5度)減算、または、減算からθ(5度)加算された第1基準点D1における位置信号が示す第1基準位置と、第1基準点D1のθ(5度)前の反転タイミングからさらにθ(5度)前の第2基準点D2における位置信号が示す第2基準位置と、の中点を求めることにより反転位置Tを算出し、算出した反転位置T等に基づいて反転ピッチP及び反転角度を算出する。
(もっと読む)
ホース検尺装置
【課題】簡単な構造でホース取り出し長さを誤差なく正確に測定する。
【解決手段】ホース取り出し開始時にセンサー1で最先端のマークMを読み取ってからホースHを取り出す。取り出されたホースHの長さが測長手段2で測定されると共に、予め設定された所望のホース切断長さに対する測長手段2からの測定データが表示部4に表示され、表示を確認しながらホースHの取り出し、所望ホース切断長さに到達した時点で、ホースHの末端側のマークMをセンサー1で読み取る。データ処理部3が、測長手段2からの測定データに基づきホース取り出し終了位置のマークMを検索し、ホース取り出し開始時とホース取り出し終了時に読み込んだ両マークMからの長さデータの差を求め、長さデータの差と、所望のホース切断長さとを比較し、両者が一致した時のみ、測定完了信号を出力して作業者に通知される。
(もっと読む)
プラットホームの高さ及び離れを計測する計測器及びその計測方法
【課題】鉄道構造物であるプラットホームのホームの高さ及びホームの離れを簡易、迅速、安価に計測することができる計測器及び計測方法を提供すること。
【解決手段】本発明の計測器は、プラットホーム端に設置する第1のL型部材と、棒と、鉄道線路の内側レールに設置する棒の下部に取り付けられたレール取付け用部材と、棒に取り付けられた目盛りを有するゲージと、棒に取り付けられた傾斜計とを備え、レール取付け用部材は、第2のL型部材と、棒を取り付ける構造を備える棒取付け部材と、レール取付け部材を回転可能にする軸と、第2のL型部材と棒取付け部材とを接続して軸を回転可能にする軸受け部とを有し、内側レールの頭面中心から軸の中心までの水平方向の距離が第1のL型部材の水平方向の厚みと一致しており、かつ内側レールの頭面中心から軸までの垂直方向の距離が第1のL型部材の垂直方向の厚みと一致していることを特徴としている。
(もっと読む)
位置決めシステム
【課題】可動型ポジショナーのための位置決めシステムとして、機械的に複雑でなくてもポジショナーに高い位置決め精度を可能とし、フレキシブルにさまざまな用途に適するようなものを得ること。
【解決手段】
ポジショナーを位置決めする位置決めシステムが、ポジショナー(10)を駆動するモーター(18)と、測定装置とを備え、この測定装置は、モーター(18)を制御するためポジショナーの調整トラベルを直接測定する。このため牽引ワイヤ(32)がポジショナーと結合され、ドラム(36)に巻き取られる。ポジショナーの調整トラベルを測定するため、シャフトエンコーダー(42)を用いて、ドラム(36)の回転を測定する。
(もっと読む)
測定もしくは加工を行う3次元機械の位置を固定座標系において識別するシステム
【課題】3次元機械の位置を固定座標系において識別するシステムを提供すること。
【解決手段】本発明の上記システムは、機械スタンド(12)に関係付けられた支持壁(11)の識別箇所に着座する第1基部(101)であって、該基部はその頂部に担持プラットフォームを備えるという第1基部と、第1基部と同一的な第2基部(102)であって、固定座標系に関係付けられた支持表面(21)上の識別箇所に着座する第2基部と、相互に結合された2つの枢動アーム(113、115)を有する多軸アセンブリ(110)であって、該多軸アセンブリ(110)は、各アームに結合された2つの端部片(111、117)を有し、各端部片は該端部片が所定位置に在るときに対応基部の中央軸心に一致する主要軸心を有し、多軸アセンブリは、その軸心の各々の回りにおける夫々の回転角度を測定する一体的角度エンコーダも備えるという多軸アセンブリと、を有する。
(もっと読む)
強化された手動制御によるCMMアーム
本発明は、外郭が設けられた強固CMMアーム用装置に関し、内部CMMアームと、内部CMMアームを、1つ以上の内部ボリュームが、固体対象物および流体の進入に対してシールされるように、複数の伝達手段を介して駆動する外郭を備える。本発明はまた、RCAの触覚制御にも関する。 (もっと読む)
測定器
【課題】 操作性が高く、かつ、検出精度、検出分解能が高い測定器を提供する。
【解決手段】 スピンドル300の回転に応じてスピンドル300の異なる回転角に対して異なる値の位相信号を発信する位相信号発信手段400と、位相信号を演算処理してスピンドルの絶対位置を求める演算処理部500と、を備える。位相信号発信手段は、位相信号を所定のピッチで発信する。スピンドル300の異なる回転角に対して位相信号は異なる値であるので、位相信号からスピンドル300の回転角が一義的に決定される。インクリメンタル式と違って、位相信号の読み飛ばし等が問題とはならないので、スピンドル300の高速回転を許容して測定器の操作性を向上させることができる。さらに、位相信号の読み飛ばしが問題とはならないので、スピンドル300の回転に対する位相信号の変化を細密化できる。
(もっと読む)
付着された連結手段の動き程度を測定する装置
付着された連結手段の引っ張られた程度、方向及び長さを測定できる装置を開示する。一端は装置の内部に連結されており、他端は前記装置の一側面を介して外部に位置する連結手段、連結手段の他端が装置外部に引っ張り出されるときに発生する微小変化を感知して連結手段に加えられた張力を検出する張力検出部、張力により連結手段が、張力方向に実質的に直交する平面空間で、上下あるいは左右に移動する程度を感知して、連結手段が引っ張られる方向を測定する方向検出部、及び張力により引っ張られた連結手段の装置外部への引出し長さを測定する長さ検出部を備え、ケーブルなどの連結手段が引っ張られた場合に、そのケーブルに連結された装置が、引っ張られた状態についての情報を検出する。したがって、該発明の装置が付着されたロボット子犬と、本発明のケーブルを手に取って散歩を行った場合に、そのケーブルの保持状態についての情報を提供し、ユーザの意向についてロボット子犬に知らせ、その結果、ロボット子犬が、ユーザの意向にしたがってユーザについてくるようになる。これにより、本装置がユーザの意向にいての情報をこの装置に提供するので、ロボット子犬などの自動的に移動できる装置は、本装置の使用によって、より便利に使用することができる。 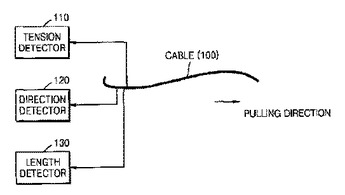 (もっと読む)
(もっと読む)
位置測定方法
【課題】簡単かつ正確に被測定面の位置を測定可能な位置測定装置を提供する。
【解決手段】被測定面上に測定点P1〜P4を4つ以上設定し、フランジ面14a内に各測定点P1〜P4を頂点とした第1〜第4の仮想三角形X1〜X4を複数形成するとともに、各仮想三角形X1〜X4を含むフランジ面14aの位置を三点測量方法により算出する。これにより、測定作業が簡単でかつ、測定点P1〜P4が3つの場合に比べてフランジ面14aの位置を正確に測定することができる。
(もっと読む)
複数の関節軸を有する多関節式アーム付き三次元測定器具
本発明は、複数の軸回転ピンを包含する多関節式アームを備える三次元測定器具に関していて、前記軸回転ピンの各々を中心とする回転角度を個別に測定するために、前記アームに内蔵される角度コーダを備える。本発明は、器具(1)のアーム(4;5)の少なくとも1つが、二つのアーム部分の間に挿入される中空管(4.11;5.11)を包含し、前記中空管がその端部の各々で、突合せ接合する端部の相互の締付けとは無関係に、精確で安定し繰返されるアームの軸線上の芯合せを保証するために、隣接するアーム部分の端部の突合せ接合の形態と適合する突合せ接合の形態を有し、前記中空管と前記アーム部分との間の結合が、器具全体を再較正すること無く、中空管を長さの異なる別の中空管と現場で交換することが可能である着脱可能な締付け手段(10)によって、前記突合せ接合する端部に備えられることを特徴とする。  (もっと読む)
(もっと読む)
回転運動変換装置
【課題】
回転ローラの半径方向の変形、消耗を抑制しつつ、摩擦係数を高めることができるようにして、直動部材の直動位置の計測精度を向上させる。
【解決手段】
回転ローラ110のうち、少なくともロッド2に接触する部分の一部110dを、回転ローラ110の回転中心軸110cとロッド202の表面との距離を一定値dに保持することができる程度に硬い材料(たとえばS45C)で構成し、回転ローラ110のうち、少なくともロッド2に接触する部分の他の一部114を、回転ローラ110とロッド202との間で滑りが生じない程度に摩擦係数が高い材料(NBR等の弾性部材)で構成する。
(もっと読む)
41 - 60 / 66
[ Back to top ]