
Fターム[2F063CA21]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 目的 (1,548) | 位置ずれ防止 (78)
Fターム[2F063CA21]の下位に属するFターム
回転防止 (5)
バックラッシュによるもの (19)
すべり、スリップによるもの (3)
たわみによるもの (4)
Fターム[2F063CA21]に分類される特許
41 - 47 / 47
非接触式位置検出センサ
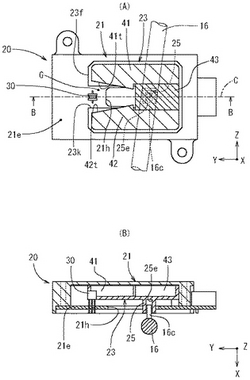
【課題】 精度の高い非接触式位置検出センサを安価に製作することを目的とする。
【解決手段】 本発明に係る非接触式位置検出センサは、可動部23が固定部21に対して一定方向に移動すると、磁束検出素子30が検出する磁束密度が変化することで、固定部21に対する可動部23の相対位置が求められる構成の非接触式位置検出センサ20であって、磁石43には、磁束を誘導するためのヨーク41,42が接続されており、ヨーク41,42には磁束を誘導する部分の途中に隙間Gが設けられており、磁束検出素子30は、固定部21に対して可動部23が移動することにより、ヨーク41,42の隙間G内を一定方向に相対移動する構成であり、ヨーク41,42の隙間Gを構成する部分は、磁束検出素子30が検出する磁束密度を予め決められたパターンに基づいて変化させることが可能な形状に加工されている。
(もっと読む)
構造物の変位測定装置

【課題】 近接工事による構造物の変位を測定する装置において、基準線の揺れによる影響を無視できるようにした安価な構造物の変位測定装置を提供する。
【解決手段】 構造物7が工事の影響を受ける範囲を挟んだ外側に設定された固定点の間に張架する線材2と、工事の影響を受ける範囲内の変位測定点に対応する線材に取り付けた測定対象体3と、測定対象体3と構造物7の位置の変化を測定する構造物7に固定した変位計測センサ4a、4bと、前記測定対象体3の揺れを減衰させる減衰装置5とを備えた。
(もっと読む)
位置決め装置
【課題】簡便かつ安価な構成で、可動部材の傾きを抑えながら位置決め制御できる位置決め装置を提供する。
【解決手段】位置決め装置10は、圧電素子14、圧電素子14の一端に固定された駆動部材16、および、駆動部材16上に移動可能に摩擦保持された可動部材18からなる圧電アクチュエータ20と、圧電素子14を駆動する駆動回路21と、可動部材18の位置を検出する位置センサ25と、位置センサ25からの信号を処理する検出回路26と、検出回路26による位置検出値に基づいて駆動回路21に駆動指令信号を与えることで可動部材18の位置フィードバック制御を行う制御回路28とを備え、可動部材18の位置決め動作の際、制御回路28は、可動部材18が目標停止位置に一旦到達した後に、オーバーシュートを伴う位置決め制御を所定時間以上さらに継続する。
(もっと読む)
外形追跡装置
外形追跡装置は、ウォータージェット・ノズルの周囲に間隔をあけて配置された複数のセンサを含み、前記センサ各々は、作業面と前記ノズルの長手方向軸に垂直な第1の平面との間の距離を測定するように構成されている。前記センサは、前記第1の平面にあるホール効果センサおよび前記作業面に平行な第2の平面にある磁石を含んでもよい。検知回路は、前記センサからの信号を処理して、前記第1の平面に対する前記作業面の角度、および前記ノズルの開口部と前記作業面との間の距離を決定する。衝突検知センサは、前記装置が前記作業面の平面上で障害物の所定の距離の範囲内に接近すると、信号を供給する。シールド・プレートは、前記作業面の上方に低角で発生する切断流体の第2のしぶきを阻止し、かつ減衰させる。  (もっと読む)
(もっと読む)
内燃機関用吸気制御装置
【課題】 全閉開度調整用スクリューを廃止しながらも、全閉クリアランスを微調整することのできる内燃機関用吸気制御装置を提供することにある。
【解決手段】 バルブギヤ7の内周部に、スロットルシャフト3の軸方向の一端部の結合部27を相対回転可能に嵌合することが可能な円形状の嵌合穴44を設けることにより、バルブギヤ7に設けられる全閉ストッパ部47をスロットルボデーに設けられる全閉ストッパに突き当てた状態で、全閉位置となるように嵌合穴44内で、スロットルシャフト3の結合部27を回転させることで、全閉クリアランスを微調整することができる。すなわち、全閉開度調整用スクリューを廃止しながらも、全閉クリアランスを微調整することができるので、部品点数や組付工数を低減でき、コストダウンを図ることができる。
(もっと読む)
制限移動位置マグネット
【課題】位置マグネットの移動を制限し、たとえシリンダの測定対象部分がデッドゾーン内に移動した場合においても、位置マグネットがセンサの動作領域内にあるようにする。
【解決手段】磁歪式検出器内の位置を示すマグネット1の移動を制限する移動制限配列が開示されている。位置マグネット1は、プランジャ2のマグネットストップ6に対してスプリング7の圧力によって保持されて、センサ4の動作領域5内にある間プランジャ2の位置に正確に追従する。シリンダ3のリミットストップ9は、センサ4の動作領域5に対応し、位置マグネット1がセンサ4のデッドゾーン中に移動するのを防止できる棚部を有する。
(もっと読む)
回転角検出装置
回転軸2と同期して回転する磁性体のヨークプレート3a,3bを設ける。ヨークプレート3a,3bとエアギャップG1を介して軸方向着磁のマグネット5を配置する。ヨークプレート3a,3bの外径R1はマグネット5の外径R2よりも大径に形成される。マグネット5は磁性体の固定プレート6に固定される。固定プレート6のポールピース8a,8bの先端部にはホールIC9a,9bが取り付けられる。ホールIC9a,9bはマグネット5によって形成される磁路M中に配置される。回転軸2が回転するとマグネット5とヨークプレート3a,3bの対向面積S1,S2が変化し、磁路M中のホールIC9a,9bを通過する磁束の密度も回転角に比例して直線的に変化する。この変化をホールIC9a,9bにて捉え、回転軸2の回転角度を検出する。これにより、検出精度を損なうことなく回転角検出装置の製造コストの低減を図る。 (もっと読む)
41 - 47 / 47
[ Back to top ]