
Fターム[2F063CA23]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 目的 (1,548) | 位置ずれ防止 (78) | バックラッシュによるもの (19)
Fターム[2F063CA23]に分類される特許
1 - 19 / 19
操舵角センサ
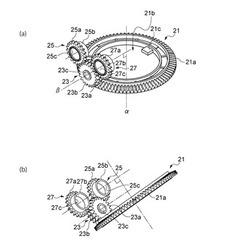
【課題】環状駆動ギヤの真円度によって、第1の従動ギヤ及び第2の従動ギヤに生じる回転角度の誤差の影響が小さくされて、ステアリングホイールの回転角度情報を精度良く生成することができる操舵角センサを提供する。
【解決手段】ステアリングホイールの回転に伴って回転する環状駆動ギヤ21と、それぞれマグネットが設けられて前記環状駆動ギヤ21の回転に応じて従動回転する第1の従動ギヤ25及び第2の従動ギヤ27と、を備え、前記第1の従動ギヤ25及び前記第2の従動ギヤ27の回転に基づく磁界の変化により前記ステアリングホイールの回転角度情報を生成するための操舵角センサにおいて、前記環状駆動ギヤ21と、前記第1の従動ギヤ25及び前記第2の従動ギヤ27と、の間に、それぞれのギヤ25、27と噛み合う中間ギヤ23を介在させる。
(もっと読む)
回転角度検出装置および電動パワーステアリング装置

【課題】簡単な構成でメインギヤと検出ギヤ間のバックラッシによる検出誤差を補正し、精度の高い回転角度を検出できる回転角度検出装置および電動パワーステアリング装置を提供する。
【解決手段】回転検出手段から出力される検出信号に基づいてステアリングシャフトの回転角度を演算するともに、ステアリングシャフトの回転角速度が所定値以上である場合に、操舵トルク検出手段により検出される操舵トルクに基づいて演算されるトーションバーの捩れ角と、ステアリングシャフトの回転角度との差分から、メインギヤと検出ギヤ間のバックラッシによる誤差を補正するためのバックラッシ補正値を演算する回転角度演算手段と、バックラッシ補正値に基づいてステアリングシャフトの回転角度を補正する回転角度補正手段とを備える。
(もっと読む)
回転角度検出装置および電動パワーステアリング装置
【課題】温度変化があった場合でも、ギヤのバックラッシュの変化量を低減できる回転角度の検出精度のよい回転角度検出装置および電動パワーステアリング装置を提供する。
【解決手段】ケース8は、センサハウジング9との取付け部分、及び検出ギヤ4の回転を支持する部分に線膨張係数の小さい金属により形成されたインサート部材11がインサート成形されている。また、回転体10及びメインギヤ2内に装着されメインギヤ2を保持する保持リング3が同じく線膨張係数が小さい金属材料で形成されている。この保持リング3を介してメインギヤ2は回転体10に圧入され、回転体10にメインギヤ2がガタのない状態で組付けられる。
(もっと読む)
回転角度検出装置の初期設定方法
【課題】初期設定作業の簡素化を図りつつ、しかも当該作業精度に依存することなく検出誤差を低減することができる回転角度検出装置の初期設定方法を提供する。
【解決手段】初期設定時には、まず主動歯車が正方向へ任意の角度だけ回転される。このときサンプリングされる第1及び第2の従動歯車の回転角度αn,βnと、これらに基づき算出される主動歯車の仮回転角度θLから逆算される第1及び第2の従動歯車の回転角度αL,βLとの関係に基づき、2つの回帰直線Y1,Y2が求められる。同様にして、主動歯車が逆方向へ任意の角度だけ回転されたときの2つの回帰直線Y3,Y4が求められる。つぎに、各回帰直線Y1〜Y4と、サンプリングされる第1及び第2の従動歯車の各回転角度αn,βnとの差分の平均値が、実際にサンプリングされる第1及び第2の従動歯車の回転角度に加算される補正データとして初期設定される。
(もっと読む)
回転角度検出装置
【課題】主動歯車の回転角度を理論上検出可能とされる全範囲において正確に検出することができる回転角度検出装置を提供する。
【解決手段】マイクロコンピュータは、周期数iを求めるに際して、関係式(e)が成立する場合には式(c)に基づき周期数iを算出する。関係式(f)が成立する場合には式(c)の「θab−θa」の値に最大制限値θabLimitを加算して、また関係式(g)が成立する場合には式(c)の「θab−θa」の値に最大制限値θabLimitを減算して周期数iを算出する。この算出される周期数iを式(d)に適用して絶対回転角度θrを算出する。
i=(θab−θa)/(mΩ/z)・・・(c)
θr=m(α+iΩ)/z・・・(d)
0≦θab−θa≦θabLimit・・・(e)
θab−θa<0・・・(f)
θab−θa>θabLimit・・・(g)
(もっと読む)
絶対位置測定装置
【課題】スパイラルキー溝方式の絶対位置測定装置において、キーおよびキー溝間のがたつきを低減することができ、測定精度を向上させることができる絶対位置測定装置を提供すること。
【解決手段】スピンドル3には、外周にリード角の異なる第1のキー溝32と第2のキー溝33とが形成され、位相信号発信手段4は、スピンドル3が挿通された板状のステータ40と、スピンドル3を中心に回転可能に支持されて第1のキー溝32に係合する第1のキー51を有する筒状の第1のロータ50と、第1のロータ50の外側でスピンドル3を中心に回転可能に支持されて第2のキー溝33に係合する第2のキー61を有する筒状の第2のロータ60と、第1のロータ50および第2のロータ60を相反する回転方向に与圧する与圧手段としてのコイルばね70とを有する。
(もっと読む)
回転検出装置の信号処理回路
【課題】検出対象の実質的な回転方向を含む回転情報をより正確に生成出力することのできる回転検出装置の信号処理装置を提供する。
【解決手段】出力部8は、クランクロータ1の回転方向に逆転が無かった旨が2回数連続して判定される場合、これら一連の判定のうちの最初の判定時直前の第1判定タイミングにおけるクランクロータ1の回転方向に係る判定結果を用いて第3パルス信号Scを生成出力する。また、出力部8は、クランクロータ1の回転方向に逆転が有った旨が判定される場合、この逆転が有った旨が判定されてからクランクロータ1の回転方向に逆転が無かった旨が2回連続して判定されるまでにおいては、これら一連の判定のうちの最初の逆転が有った旨の判定時直前における第3パルス信号Scの信号レベルを継続して出力する
(もっと読む)
回転角度検出装置
【課題】検出対象である回転体の回転角度の検出精度を向上させることができる。
【解決手段】舵角センサ11は、ステアリングシャフト12と一体回転する外歯車14及びこれに噛み合う内歯車15を備えた。外歯車14及び内歯車15の第1及び第2の検出面14a,15aには、6つの第1及び第2検出部材21,31を環状に配設するとともに、これらの内側には環状の第1及び第2補助検出部材22,32を設けた。第1及び第2検出部材21,31の幅、並びに第1及び第2補助検出部材22,32の幅を検出してこれら幅情報を含む明暗情報を出力するラインセンサ42を、第1及び第2の検出面14a,15aに対向して配設した。ラインセンサ42からの明暗情報に基づき外歯車14及び内歯車15の単位角度範囲内における回転角度を求め、これら回転角度の組み合わせに基づき外歯車14の絶対回転角度を算出するマイクロコンピュータ43を備えた。
(もっと読む)
回転角度検出装置
【課題】ギア間のガタつきが少なく検出精度の高い回転角度検出装置を提供する。
【解決手段】ステアリングシャフトと一体に回転するロータ歯車3の回転を遊星歯車機構によって構成された減速機構5によって減速し、該減速後の回転を減速側検出用ギア6に伝達するものとしたので、回転の伝達効率がよく、また減速機構5を構成する各ギアの軸が同一方向であるため、ステアリングシャフトの回転を少ないガタによって減速側検出用ギア6に伝達することができる。したがって、減速機構5でのガタつきが少ないのでステアリングシャフトの回転角をより正確に検出することができる。
(もっと読む)
操作軸の接続部材、およびこの接続部材を備えた遠隔操作装置
【課題】操作レバーの抉り力の伝達を防止でき、バックラッシを生じることのない操作軸の接続部材、およびこの接続部材を備えた遠隔操作装置を提供すること。
【解決手段】操作レバーの駆動軸とポテンショメータの回転軸を略同軸に接続する接続部材40は、樹脂により一体成形され、駆動軸の溝部に対してスライド可能に嵌入する4本の脚部44、および2本のスリット41を有する略円筒形の本体42を有する。本体42を駆動軸の穴に緩挿して4本の脚部44を駆動軸の端部に形成した溝部に嵌入し、本体42の内側にポテンショメータの回転軸を挿通する。これにより、操作レバーの駆動軸に対してポテンショメータの回転軸を軸方向と交差する全ての方向に関して僅かに移動可能とすることができる。
(もっと読む)
回転センサ
【課題】歯車のバックラッシ等の影響を極力受けず検出精度に優れた回転センサを提供する。
【解決手段】被測定用回転体50の回転角度をこの回転体以外の測定用回転体を用いて測定する回転センサで、被測定用回転体とほぼ同一の回転数で回転する第1の測定用回転体10と、この回転体と連動して回転し、回転数がこの回転体より小さい第2の測定用回転体20を備え、被測定用回転体と第1の測定用回転体が歯車で連結され、第1の測定用回転体と第2の測定用回転体が歯車で連結され、第2の測定用回転体は第1の測定用回転体の回転に伴って間欠的に回転し、各測定用回転体には、径方向磁界を有する永久磁石が中心に配置され、更に各磁石が発生する磁界の径方向の変化を検出可能な箇所に所定数の磁界検出素子が測定用回転体の回転と独立してそれぞれ配置されている。
(もっと読む)
回転センサ
【課題】歯車のバックラッシによる角度誤差を極力抑えつつ、360°を超える角度の検出が可能な回転センサを提供する。
【解決手段】被測定用回転体の回転角度をこれ以外の測定用回転体を用いて測定する回転センサであって、被測定用回転体150と連動してこれとほぼ同一の回転数で回転する第1の測定用回転体110と、第1の測定用回転体と連動して回転し、回転数が第1の測定用回転体より小さい第2の測定用回転体120を備え、第1の測定用回転体及び第2の測定用回転体には径方向磁界を有する永久磁石がそれぞれの中心に配置され、更に各永久磁石が発生する磁界の径方向の変化を検出可能な箇所に所定数のホール素子112,122が各測定用回転体の回転と独立してそれぞれ配置され、磁界検出素子の出力を用いて各測定用回転体の回転角度を検出することで被測定用回転体の回転角度を測定する。
(もっと読む)
回転角度検出装置
【課題】装置サイズの小型化を図りつつ回転角度を360°以上の角度範囲で高精度に検出可能な回転角度検出装置を提供する。
【解決手段】回転体3と、第一の歯車4と、第一の歯車4に装着された第一の磁石41と、第一の磁石41の磁界を検出可能な第一の磁気検出素子6と、第一の歯車4とは異なる速度で回転する第二の歯車5と、第二の歯車5に装着された第二の磁石51と、第二の磁石51の磁界を検出可能な第二の磁気検出素子7と、第一及び第二の磁気検出素子6,7の出力に基づいて回転体3の回転角度を算出する演算回路8とを備え、第一及び第二の歯車4,5は、各々の軸線方向に互いに重なるように配置されている。従って、回転軸2の回転角度を360°以上の角度範囲で高精度に検出することができると共に、装置全体のサイズを小型化することができる。
(もっと読む)
舵角センサ
【課題】 高精度の舵角センサを提供する。
【解決手段】 ステアリングシャフト(105)反転時のバックラッシによる主動ギア(7g)に対する当該従動ギアの回転遅れを補正するための補正値を記憶可能な記憶手段(43)を設けてあり、演算手段(39)が、測定機構(15)の測定結果を当該記憶手段に記憶させた補正値に基づいて補正することによって、ステアリングシャフトの回転角度を演算可能に構成してある。補正値に基づいて測定機構による従動ギアの測定結果が補正されるので、主動ギアと従動ギアとの間に存するバックラッシを完全又は略一致させることができる。すなわち、舵角センサの高精度化が実現する。
(もっと読む)
回転センサ
【課題】測定すべき回転体の回転角度検出の分解能を向上させるとともに耐ノイズ性を向上させた検出精度の高い回転センサを提供する。
【解決手段】測定すべき回転体とともに一体に動く主回転体10と、当該主回転体の回転に対応して主回転体の回転数と異なる回転数で回転する副回転体12と、主回転体の回転を検出する第1の検出手段50と、副回転体の回転を検出する第2の検出手段62を有し、第1の検出手段の検出信号と第2の検出手段の検出信号とから測定すべき回転体の絶対回転角度を検出する回転センサであって、第1の検出手段と第2の検出手段から得られる各検出信号がそれぞれ各回転体の回転に対応して周期的に出力され、かつ第1の検出手段の検出信号の周期をTc、第2の検出手段の検出信号の周期をTmとした場合、
(Tm−Tc×i)×n=Tm(i及びnは正の整数)の関係を満たすようになっている。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、誤差が少なく高精度な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】制御手段21が回転歯車1と、第一の検出歯車2や第二の検出歯車3の歯間の隙間、バックラッシを記憶すると共に、各検出手段からの検出信号に対し、このバックラッシ分の誤差を補正して回転歯車1の回転角度を検出することによって、高精度な回転角度の検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
絶対回転角度およびトルク検出装置
【課題】回転軸に連結し外周面に交互に極性の異なる磁極を着磁させたターゲットを用いて、高精度・高分解能に多回転の絶対回転角度およびトルク検出を行う装置を提供することを目的とする。
【解決手段】入力軸2と連結し外周面に等間隔をなして交互に極性の異なる磁極が着磁してある第1のターゲット3を保持し多回転可能な歯車を持つ第1の回転体1と、この第1の回転体1の歯車に接続され第1の回転体1より低速に回転し、中心部に磁石9が配置された第2の回転体8と、出力軸5と連結し外周面に等間隔をなして交互に極性の異なる磁極が着磁してある第2のターゲット6を保持し多回転可能な歯車を持つ第3の回転体4と、これらのそれぞれの回転角度を検出する第1、第2、第3の検出手段11、10、12からなる簡単な構成で、高精度・高分解能に絶対回転角度およびトルク検出を行うものである。
(もっと読む)
回転角検出装置
【課題】 ギヤのバックラッシュの影響を排除して回転角検出装置の検出精度を高める。
【解決手段】 回転角検出装置11は、ステアリングシャフト15の外周に設けた主プーリ14と、主プーリ14にコグベルト21を介して接続された第1、第2副プーリ20A,20Bと、両副プーリ20A,20Bの回転角をそれぞれ検出する第1、第2回転角センサ18A,18Bとを備え、両回転角センサ18A,18Bの出力に基づいてステアリングシャフト15の回転角を検出する。コグベルト21を用いたことにより、主プーリ14および第1、第2副プーリ20A,20Bをギヤで連動させる場合に発生するバックラッシュの影響を受けることがなくなり、騒音の発生を抑制しながら3個のプーリ14,20A,20Bの回転角を精度良く連動させることができる。しかもコグベルト21にテンショナー22で張力を付与するので、コグベルト21の緩みを防止して回転角の検出精度を更に高めることができる。
(もっと読む)
回転角検出装置
【課題】 ギヤのバックラッシュの影響を排除して回転角検出装置の検出精度を高める。【解決手段】 回転角検出装置11は、ステアリングシャフト15の外周に設けた主プーリ14と、主プーリ14にコグベルト28を介して接続された第1、第2副プーリ20,25と、両副プーリ20,25の回転角をそれぞれ検出する第1、第2回転角センサ18,23とを備え、両回転角センサ18,23の出力に基づいてステアリングシャフト15の回転角を検出する。コグベルト28を用いたことにより、主プーリ14および第1、第2副プーリ20,25をギヤで連動させる場合に発生するバックラッシュの影響を受けることがなくなり、騒音の発生を抑制しながら3個のプーリ14,20,25の回転角を精度良く連動させることができる。しかも主プーリ14および第1、第2副プーリ20,25をギヤで連動させる場合に比べて、それら3個のプーリ14,20,25の配置の自由度が向上する。 (もっと読む)
1 - 19 / 19
[ Back to top ]