
Fターム[2F063DC04]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 感知した機械的変位の伝達 (359) | 回転変位を直線変位に伝達するもの (26)
Fターム[2F063DC04]に分類される特許
1 - 20 / 26
三次元変位測定装置
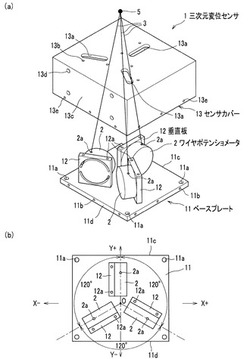
【課題】簡単な構造の三次元変位測定ユニットを用いて、精度の良い変位の計測を可能とする三次元変位測定装置を提供することを目的とする。
【解決手段】三次元変位測定装置は、ワイヤ3を巻回しているプーリを有し、ワイヤ3が引き出されることによって回転するプーリの回転角に基づいて引き出されたワイヤの長さを検出するワイヤポテンショメータ2が、3個所定の周方向角度120°の間隔を取ってベースプレート11の上に取り付けられた三次元変位センサ1と、三次元変位センサ1の3個のワイヤポテンショメータ2からのそれぞれの出力信号を用いる。単に、3個のワイヤポテンショメータ2のワイヤ3の引き出し長さを計測するだけで、3本のワイヤ3で構成する三角錐の頂点の変位測定端5の三次元位置が一意に特定でき、それを容易に換算式でXYZの直角三次元座標に変換できる。
(もっと読む)
回転角度検出装置、、回転角度検出方法、部品実装装置

【課題】回転軸VAを中心とする回転動作の他に回転軸VA方向への移動も移動部材85が行なう構成において、移動部材85の回転角度θeを磁気センサにより高精度に検出することを可能とする。
【解決手段】磁石91とホールIC921、922との回転軸VA方向への距離hが所定の検出距離となる検出位置Pdに移動部材85がある状態でのホールIC921、922の出力信号Ss、Scに基づいて、アーム61bに対する移動部材85の回転角度θeを検出する。したがって、ホールIC921,922と磁石91との距離の変化による影響を排して、ホールIC921,922の出力信号Ss、Scから、アーム61bに対する移動部材95の回転角度θeを高精度に検出することが可能となる。
(もっと読む)
操舵絶対角検出装置および車両用操舵装置
【課題】検出が容易な操舵絶対角検出装置を提供する。
【解決手段】操舵軸の回転角区間(例えば1回転360°毎)にそれぞれ応じたラック軸8の軸方向区間を設けた。軸方向区間毎に仕様の異なる複数の被検出面(平坦面341〜344)を、ラック軸8の表面8bに設けた。距離検出器33が、何れの被検出面(平坦面341〜344)を検出するかによって、ラック軸8の軸方向区間(操舵軸の回転角区間に相当)を特定する。特定された回転角区間に対応する回転角基準値に、トルクセンサの第1レゾルバにより検出された回転角値を加算して、操舵絶対角を求める。
(もっと読む)
変位検出装置
【課題】変位検出装置において、全長を短縮する。
【解決手段】変位検出装置1は、検出コイル2と、検出コイル2に対して変位可能に設けられた変形可能な変位体3と、外部からの作用を受けて変位することにより、変位体3を変位させる変位取り出し部5と、変位体3が変位取り出し部5により変位させられるときに、変位体3の少なくとも一部を変形させて曲線軌道で変位させる巻取り部4a、4bとを備える。巻取り部4a、4bは、変位体3が変位取り出し部5により変位させられるときに、変位体3の少なくとも一部を巻取ることによって、変位体3の少なくとも一部を変形させて曲線軌道で変位させる。変位体3は、変位取り出し部5により変位させられるとき、巻取り部4aに巻取られると共に巻取り部4bから繰り出され、又は、巻取り部4bに巻取られると共に巻取り部4aから繰り出される。これにより、変位検出装置1の全長を短縮することができる。
(もっと読む)
車両変速機用操作装置
【課題】軸方向が互いに交差する2方向への回動操作が可能な操作手段を有する構造で、検出手段が検出する移動体の位置精度を向上できる車両変速機操作装置を得る。
【解決手段】ノブ90がセレクト操作方向に回動操作された場合には、スライダ40がスライダ支持部34のガイド溝36に案内されてスライドする。しかしながら、ノブ90がシフト操作方向に回動操作された場合にはるセレクトレバー50の幅方向端面により押圧された回動プレート122が側壁部24を押圧してシャフト56周りにスライダ支持体20を回動操作させる。このため、ノブ90がシフト操作方向に回動操作された際には、スライダ40が軸部28周りに回動されるだけで、ノブ90の回動が他の向きへの移動に変換されない。これにより、シフト操作方向へのノブ90の回動操作に関しては、部品間のガタの影響が少なく、スライダ40に設けられた永久磁石152の位置精度を高くできる。
(もっと読む)
回転検出システム
【課題】検出対象の数が多くなっても安価に検出対象の回転角度または回転数を検出できる回転検出システムを提供する。
【解決手段】スパイラルインダクタ122が形成されたワッシャ120と、スパイラルインダクタ112が形成されたワッシャ120に対して所定の回転軸を中心に回転するボルト110と、スパイラルインダクタ112が回転することによるスパイラルインダクタ122とスパイラルインダクタ112との間の相互インダクタンスの変化を基に、ボルト110のワッシャ120に対する回転角度または回転数を検出する制御部240と、を備え、スパイラルインダクタ122およびスパイラルインダクタ112はボルト110の回転軸を周回するように形成された渦巻導体を有する。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、簡易な構成で、複数回転する回転体の回転角度が検出可能で安価な回転角度検出装置を提供することを目的とする。
【解決手段】検出体22の内周に雌ネジ部22Cを設けると共に基体30に雄ネジ部32Aを設けて、この雄ネジ部32Aに雌ネジ部22Cを螺合させ、回転体21の回転に連動して検出体22を回転させると共に回転軸方向の上下方向へ移動させ、磁石23Aと磁気検出素子23Bからなる検出手段からの検出体22の回転及び回転軸方向への移動に伴う検出信号S1、S2によって、制御手段29が回転体21の回転角度を検出するように回転角度検出装置を構成する。
(もっと読む)
回転角検出装置
【課題】 部品点数の少ない簡単な構造であり、かつ高価な多回転方式のアブソリュート型の回転位置検出手段を必要とせずに、回転体の360°を超える回転角を精度良く検出できるようにする。
【解決手段】 ステアリングシャフト11に設けた駆動ギヤ12に噛合する従動ギヤ14が支軸13まわりに回転すると、ねじ機構16により、従動ギヤ14が軸線L方向に直線移動する。移動位置検出手段20が検出した従動ギヤ14の軸線L方向の位置と、回転位置検出手17段が検出した従動ギヤ14の回転位置とに基づいて、回転角算出手段23がステアリングシャフト11の回転角を算出するので、従動ギヤ14が1回転を超えて回転する場合であっても、移動位置検出手段20により従動ギヤ14の大まかな回転数を検出し、回転位置検出手段17で従動ギヤ14の精密な回転位置を検出することで、ステアリングシャフト11の絶対回転角を精度良く検出することができる。
(もっと読む)
回転角度検出装置
【課題】低コストでコンパクトな構成をとりつつ、複数回転の回転角度を検出可能な回転角度検出装置を提供する。
【解決手段】回転体5の回転角度を検出する回転角度検出装置1であって、磁石2と、互いに直交するX軸・Y軸・Z軸の3方向の磁場成分の大きさを検出可能な磁場検出手段3とを備え、回転体5の回転に伴って、磁石2又は磁場検出手段3が、Z軸に平行な周回軸の周りを周回するとともに、周回に応じて磁石2と磁場検出手段3の相対変位のZ軸成分が増減するように構成する。
(もっと読む)
回転角度検出装置
【課題】簡易な構造、かつ小型の回転角度検出装置を得ることを目的とする。
【解決手段】回転軸14と一体に回転する第1の永久磁石5、及び第1の永久磁石5の回転角度を検出し、第1の永久磁石5の回転角度に応じた第1の検出信号を出力する第1のホール素子6a及び第2のホール素子6bを有する微小角度検出部3Aと、回転軸14の軸まわりの回転力を回転軸14の軸方向の推力に変換する変換機構(9a,10a,11)、回転軸14の軸方向の推力によって回転軸の軸まわりの回転に連動して回転軸14の軸方向に移動するヨーク10A、及びヨーク10Aの回転軸14の軸方向の移動量に応じた第2の検出信号を出力する第3のホール素子13を有する多回転角度範囲検出部8Aと、第1の検出信号と第2の検出信号とから回転軸14の軸まわりの回転角度の絶対値を算出する演算処理部と、を備えている。
(もっと読む)
コンパクトなケーブル駆動式パワースライドドア機構
スライディングドアを備えた自動車用のスライディングドア駆動組立体が、モータに作動的に連結され、回転力を出力シャフトに伝達する伝動装置を有する。ケーブルドラムが、出力シャフトに固着され、この出力シャフトと一緒に回転する。第1及び第2のケーブルが、互いに逆方向にケーブルドラムに巻き付けられる。第1のケーブルは、ケーブルドラムからスライディングドアに沿って前方に延びている。第2のケーブルは、ケーブルドラムからスライディングドアに沿って後方に延びている。支持ガイドが、第1及び第2のケーブルを、摩擦力を最小限に抑える経路に沿ってケーブルドラムから外方に且つ遠ざかって案内するようケーブルドラムから接線方向に延び出ている。前側及び後側プーリ組立体が、自動車に取り付けられると共に第1及び第2のケーブルを張力調整するためにスライディングドア駆動組立体とスライディングドアとの間で第1及び第2のケーブルに作動的に結合されている。  (もっと読む)
(もっと読む)
電動パワーステアリング装置
【課題】操舵限界に達したときに加わる衝撃を抑えるとともに、車両への搭載性を向上させることができる電動パワーステアリング装置を提供する。
【解決手段】本発明の電動パワーステアリング装置は、電動パワーステアリングユニット4を備えている。電動パワーステアリングユニット4は、トーションバー40と、モータ41と、減速装置42と、ステアリングシャフトねじれ方向検出装置43と、操舵限界検出装置44と、モータ制御回路とから構成されている。これら電動パワーステアリングユニット4の構成要素は、ハウジング45の回りに一体化されている。モータ制御回路は、操舵限界検出装置44の検出結果に基づいて、タイヤ52の装着された車輪53の回転角度が所定角度範囲を超えたとき、モータ41を停止させる。これにより、操舵限界に達したときに加わる衝撃を抑えるとともに、車両への搭載性を向上させることができる。
(もっと読む)
レンジ検出装置
【課題】レンジを正確に検出するレンジ検出装置を提供する。
【解決手段】レンジ検出装置は、自動変速機のバルブボディに取り付けられている固定部36と、レンジの選択に応じて固定部36に沿って往復移動する可動部とを備えている。可動部には磁石が設けられている。磁石の磁極は可動部の往復移動方向に変化している。固定部36にはホール素子51〜53が設けられており、可動部が往復移動すると、ホール素子51〜53と向き合う磁石の磁極が変化する。ホール素子51〜53は、可動部の往復移動に伴う磁極の変化に応じた検出信号を出力する。また固定部36には、バルブボディ側に延びる棒状の位置決め部70が形成されている。位置決め部70はバルブボディに形成された凹部と嵌合する。これにより固定部36は、バルブボディに対し往復移動方向に位置決めされる。この位置決め部70は、ホール素子51〜53と往復移動方向に重複して配置されている。
(もっと読む)
電動アクチュエータ
【課題】省スペース、かつ、安価にボールねじ軸の位置を検出することができる電動アクチュエータを提供する。
【解決手段】ボールねじ軸4のねじ溝4aの図の左方には、ボールねじ軸4の軸方向の移動量を検出する検出手段31が配置されている。検出手段31は、ボールねじ軸4の軸方向の移動量を検出するポテンショメータ32と、ポテンショメータ32の略中央部から延びる円筒状をした係合部材33とからなる。係合部材33の先には、ねじ溝4aに噛合する歯33aが設けられている。歯33aは、ボールねじ軸4が軸方向に移動した際にねじ溝4aに噛合するように、軸周りにねじったように形成されている。歯33aの凸部の断面形状は、ねじ溝4aの形状に合わせて、サーキュラアーク形状又はゴシックアーク形状となっている。
(もっと読む)
生理データ抽出装置、スイッチ装置、および生理状態警報装置
【課題】 ハンドルの回転角度を電気的に検出するセンサを要することなく、機械的な安全制御手段を用いて安全性の確保を図り、運転者の有効な生体情報のみを出力できるスイッチ装置の提供。
【解決手段】 走行車の走行方向を制御するために運転者が操作するステアリングホイールと、該ステアリングホイール上に設けられ、運転者の掌と接触した状態で運転者の生理データを検出するためのバイタルセンサを備え、該バイタルセンサからの検出出力に基づいて運転者の生理データを抽出する生理データ抽出装置において、該ステアリングホイールの回転に連動して移動する移動部材と、該移動部材が所定距離以上に移動した場合に、該移動部材の移動によってスイッチを機械的に開くスイッチ手段とを備え、該スイッチ手段によってスイッチが開いた状態になったときに、上記バイタルセンサからの検出出力を生理データとして抽出しないことを特徴とする生理データ抽出装置。
(もっと読む)
電動パワーステアリング用モータ及びレゾルバ装置
【課題】防水構造であっても、レゾルバ装置の周方向位置を容易に調整できる電動パワーステアリング用モータの提供を課題とする。
【解決手段】上記課題は、モータ100の筐体を封止してレゾルバ装置200の防水を図るシール部材241が、モータ100の筐体を構成する部材によりモータ100の軸方向から挟み込みまれて圧縮されるようにすることにより解決できる。
(もっと読む)
回転角検出装置
【課題】360度超の回転角を検出可能な回転角検出装置の温度変化や経年変化を簡素な構成により高精度に実現可能な回転角検出装置を提供すること。
【解決手段】360度を超える入力角度範囲で単調増加する第一の演算値θ1と、360度の入力角度範囲で複数回の複数周期波形の第二の演算値θ2とに基づいて第一の演算値θ1の理想値θ1rを算出し、この第一の演算値θ1の理想値θ1rと第一の演算値θ1とに基づいて理想値θ1rと演算値θ1との間のずれ量に関する関数値を算出し、前記ずれ量の関数値に基づいて第一の演算値θ1を補正して補正済み第一の演算値θ1’を求め、求めた補正済み第一の演算値θ1’と第二の演算値θ2とに基づいて出力角度θoを算出する。
(もっと読む)
舵角検出装置
【課題】全舵角範囲に亘る回転軸の回転角度を精度良く検出し、車両の舵角を簡素な構成にて精度良く検出可能な舵角検出装置を提供する。
【解決手段】ステアリングホイール30の操作に応じたステアリング軸3の回転を操舵用の車輪12,12に伝え、該車輪12,12の向きを変えて舵取りされる車両の操舵角度を、ステアリング軸3の複数回転に亘る回転角度を求めることにより検出する舵角検出装置において、ステアリング軸3に係合され、ステアリング軸3の回転に応じて移動する移動体6の移動位置を位置センサ7により検出し、この検出結果によりステアリング軸3が中立位置から左右の何回転目の領域にあるかを判定する。回転角センサにより判定された領域内でのステアリング軸3の回転角度を求めて全舵角範囲内での操舵角度を算出する。以上により簡素な構成により全舵角範囲に亘って高精度の舵角検出が可能となる。
(もっと読む)
操舵角検出装置
【課題】簡素な構成にて全操舵角範囲に亘る操舵角を高精度に検出できる操舵角検出装置を提供する。
【解決手段】ラック軸1の軸長方向の一側から他側に向けて連続的に深さが変化する溝12がラック軸1に設けられ、サポートヨーク3に設けられた可動子41の一部を該溝12の底面に当接させ、ラック軸1の移動に応じて生じる可動子41の変位を検出して、車両の操舵角を算出する構成になっており、このように連続的に深さが変化する溝12を設けているため、ラック軸1の移動に応じて可動子41は当接部の深さに追随して変位することとなり、この変位により一義的にラック軸1の移動量を知ることができ、簡素な構成にて全操舵角範囲に亘る操舵角を高精度に検出できる。
(もっと読む)
位置検出装置および自動車用ミラーの鏡面角度検出装置
【課題】移動体の位置に対する磁気センサ出力の特性において良好な直線性が得られる範囲の拡大を図った位置検出装置およびこの位置検出装置を利用した自動車用ミラーの鏡面角度検出装置を提供する。
【解決手段】2個の永久磁石42,44と1個のホール素子46を用いる。永久磁石42,44は相互の位置関係が固定に配列される。ホール素子46は永久磁石42,44の配列に対しその側方に配置される。永久磁石42,44とホール素子46とは永久磁石42,44の配列方向と平行な方向Eに相対移動する。永久磁石は、ホール素子46に対面する側の面42a,44aが相互に逆極性の磁極面を構成しかつ該磁極面42a,44aどうしが互いに内向きに傾斜して配置されている。ホール素子46の磁気センシング方向Fは永久磁石42,44の配列方向と直交する方向に設定されている。
(もっと読む)
1 - 20 / 26
[ Back to top ]