
Fターム[2F063LA17]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | ピーク値算出 (30)
Fターム[2F063LA17]に分類される特許
21 - 30 / 30
車両用衝突検知装置
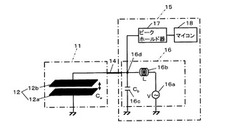
【課題】簡単な構成で静電容量式のセンサ部における配線の断線故障による誤検知を防止して確実に衝突の発生を検知可能な車両用衝突検知装置を提供する。
【解決手段】車両バンパに歩行者等が衝突すると、センサ部11において対向電極12間の距離が一時的に縮小して静電容量が増大し、これによりLC直列共振回路における共振周波数が低い側にシフトする。一方、センサ部11のサイドメンバ側電極12bと駆動回路部16とを接続する配線14に断線故障が生じると、センサ部11が駆動回路部16から遮断され、LC直列共振回路における静電容量が減少して共振周波数が高い側にシフトする。よって、衝突発生時と配線14の断線故障時とで駆動回路部16と配線14との接続点16dにおける電圧変化の態様が異なるため、これらを電圧検出値によって容易に区別可能である。
(もっと読む)
直線位置検出装置

【課題】小型かつシンプルな構造を持つ直線位置検出装置の提供。
【解決手段】コイル部と磁気応答部材とを具え、検出対象の変位に応じて前記コイル部と前記磁気応答部材の一方が他方に対して非接触的に相対的に直線変位し、これに応じた出力信号を前記コイル部より得ることにより該検出対象の変位を検出する。前記コイル部は、所定の交流信号によって定電圧駆動されるコイルを含み、該コイルへの磁気応答部材の侵入量に応じて生じるインダクタンス変化に基づく電流変化を計測し、これに基づき前記コイル部に対する前記磁気応答部材の相対的直線位置検出データを得る。
(もっと読む)
回転角検出装置
【課題】回転角センサの出力を低回転角領域で増幅して用いる回転角検出装置において、該低回転領域でのセンサ出力−回転角変換特性を高精度に学習する。
【解決手段】ストッパで規制される最小回転角θ1と最大回転角θ2における回転角センサからの増幅しない出力(等倍出力)V1,V2から、第1変換特性におけるゲインdV/dθを学習した後、増幅した出力が選択される領域での小側および大側の回転角θmin、θmaxに対応する第1変換特性における出力Vmin、Vmax、同じく第2変換特性における出力Vnmin、Vnmaxに基づいて、第2変換特性におけるゲインdnV/dnθ{=(Vnmax−Vnmin)/(θmax−θmin)}を学習する構成とした。
(もっと読む)
コンベヤベルトの摩耗検出装置
【課題】コンベヤベルトの摩耗量を、運転中に自動的に、しかも簡単かつ正確に検出できるようにしたコンベヤベルトの摩耗検出装置を提供する。
【解決手段】厚さ方向に磁化した複数の磁石シートM1〜M5を、表面に現れる極性が同方向であって、ベルト本体2の長手方向に向かって段階的に深くなるように埋設し、磁石シートM1〜M5の磁力の変化を検出する磁気センサ4を、磁石シートM1〜M5が通過する位置に配設する。
(もっと読む)
表面形状認識センサ装置
検出電極11Aが表面形状検出部2に接続され、検出電極12Aが共通電位に接続された検出素子1Aと、検出電極11Bが表面形状検出部2に接続され、検出電極12Bが生体認識部3に接続された検出素子1Bとを設け、表面形状検出部2では、これら検出素子1A,1Bから得られた個々の容量に基づき、これら検出素子と接触する位置に対応する表面形状の凹凸を示す信号をそれぞれ出力し、生体認識部3で、検出素子1Bの検出電極12Bと検出素子1Aの検出電極12Aとの間に接続された被検体9のインピーダンスに応じた信号に基づき被検体9が生体であるか否かを判定する。  (もっと読む)
(もっと読む)
シーケンシャルフローステートマシーンを有する近接検出器
近接検出器は、磁界感知要素によって供給される磁界信号に関連する状態を識別するシーケンシャルフローステートマシーンを有する。近接検出器は、状態に応答して振動を識別する振動プロセッサを含むことができる。 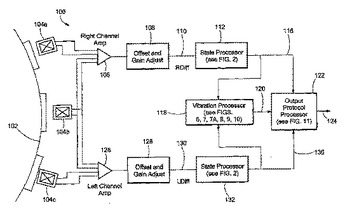 (もっと読む)
(もっと読む)
絶対回転角度およびトルク検出装置
【課題】回転軸に連結し外周面に交互に極性の異なる磁極を着磁させたターゲットを用いて、高精度・高分解能に多回転の絶対回転角度およびトルク検出を行う装置を提供することを目的とする。
【解決手段】入力軸2と連結し外周面に等間隔をなして交互に極性の異なる磁極が着磁してある第1のターゲット3を保持し多回転可能な歯車を持つ第1の回転体1と、この第1の回転体1の歯車に接続され第1の回転体1より低速に回転し、中心部に磁石9が配置された第2の回転体8と、出力軸5と連結し外周面に等間隔をなして交互に極性の異なる磁極が着磁してある第2のターゲット6を保持し多回転可能な歯車を持つ第3の回転体4と、これらのそれぞれの回転角度を検出する第1、第2、第3の検出手段11、10、12からなる簡単な構成で、高精度・高分解能に絶対回転角度およびトルク検出を行うものである。
(もっと読む)
ソレノイド駆動装置
【課題】 電磁ソレノイドのプランジャの位置を検出するためのセンサ等を別途設けることなくプランジャの位置を判断する。
【解決手段】 このソレノイド駆動装置では、電磁ソレノイドのプランジャの位置に応じて変化する電磁ソレノイドのコイル22のインダクタンスを検出する。このため、プランジャの位置を検出するためのセンサ等を別途設けることなく、コイル22のインダクタンスに基づきプランジャの位置を判断することができる。特に、本ソレノイド駆動装置では、プランジャ駆動用のパルス電圧を印加している状態でのコイル電流の応答時間に基づきコイル22のインダクタンスを検出するようにしており、プランジャ駆動用のパルス電圧とは別にコイル22のインダクタンスを検出するためのパルス電圧を印加する必要がないため、コイル22のインダクタンスを効率的に検出することができる。
(もっと読む)
測定対象のオブジェクト厚さ及び電気伝導度を測定するための方法及びデバイス
本発明は、電磁誘導を使用して、導電性の測定対象のオブジェクトの寸法および/または電気的特性を、非接触式に測定するための方法に係る。この方法において、電磁場が、測定対象のオブジェクトを貫通するように発生される。本発明は、以下の方法ステップにより実現される;トランスミッタ・コイルを、測定対象のオブジェクトの一方のサイドに配置する;レシーバ・コイルを測定対象のオブジェクトのもう一方のサイドに配置する;磁場を、トランスミッタ・コイルの中に発生させる;トランスミッタ・コイルの中に発生させた磁場に、一つのレベルから他のレベルへの突然の変化を生じさせる;レシーバ・コイルの中に誘導される電圧を検出する;トランスミッタ・コイルの中での磁場が変化する時間T2から、レシーバ・コイルの中に電圧が誘導され始める時t1までに、経過した時間を決定する;誘導される電圧の強さを決定し、そして、測定対象のオブジェクトの厚さおよび/または電気伝導度を計算する。  (もっと読む)
(もっと読む)
部分硬化加工物の軟質ゾーン領域の幅を定量的に決定する方法
本発明は、少なくとも1つの硬化領域(2)および少なくとも1つの未硬化領域(3)を有する部分硬化金属加工物(1)の軟質ゾーン領域(3)の長さを、少なくとも1つの多周波渦電流センサ(4)によって、定量的に決定する方法に関する。加工物が、いつも分離されながら、多周波渦電流センサ(4)に対して移動され、それによって多周波渦電流センサ(4)で生成された渦電流場が空間的に範囲を定められて加工物(1)と無接触に相互作用し、加工物(1)に渦電流を引き起こし、この渦電流が、今度は、多周波渦電流センサ(4)に測定信号を生成し、それによって、空間的に範囲を定められた渦電流場が、加工物表面に対して長手方向に向けられかつ加工物表面に沿った軟質ゾーン領域(3)の最大延長(6)よりも大きな最も大きな延長部分を有していることを、本発明は特徴とする。さらに、n個の加工物の数が較正目的のために測定され、それによって、軟質ゾーン幅の所定の標準的な大きさ、すなわち加工物表面に対して長手方向に向けられた軟質ゾーン領域の延長部分の特定の大きさを想定して、n個の加工物の測定信号が、較正曲線を作るために使用される。最後に、較正曲線を基礎として利用しながら、絶対軟質ゾーン幅(b)は、各個々の加工物(1)から得られた測定信号に対応付けられる。 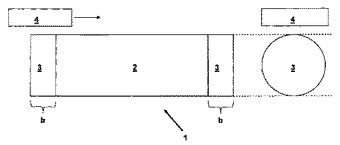 (もっと読む)
(もっと読む)
21 - 30 / 30
[ Back to top ]