
Fターム[2F065AA24]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606) | 高さ (1,116)
Fターム[2F065AA24]に分類される特許
1,101 - 1,116 / 1,116
アイテムの選択セグメントの体積に対応する数値表示を示すための装置及び方法

【解決手段】アイテムの未切断選択セグメントの重量又は価格を表示する装置及び方法は、位置指示部材を、支持面上に位置するアイテム上方を通過させることを含む。位置指示部材は、一つ以上のセンサを有し、そのセンサが、上記部材が基準位置からアイテム上方の選択された他の位置まで横断される際に、アイテムの連続する横断面輪郭に対応し、アイテムの選択セグメントを規定する信号を生成する。同時に、好ましくは一つ以上の微小構造電子機器(MEMS)加速度計装置から構成された作動検出器配置構造は、アイテムに沿って位置指示器支持部材が移動したときにその作動に対応する信号を生成する。これらの信号は、指示部材の選択された連続位置間に位置するアイテムの未切断選択セグメントの体積を決定すべく、信号処理装置で処理される。これらの累積的な体積決定のそれぞれは、数値重量に変換される、又は、特定のセグメントをアイテムから切断する前に、重量又は価格の情報が見ている顧客に同時に提供される。可視光帯は、センサ・バーからアイテムの特定のタイプの密度要素に基づく部分価格値上に投影され、それにより、部材が上記アイテムに沿って横断されたときに数値的な重量又は(重量に基づく)価格値が表示され、したがってアイテムのオペレータが数値表示に対応する選択セグメントの境界を観察者に明確に示すことが可能となる。 (もっと読む)
特にマイクロシステム技術における幾何構成の干渉と画像化の組合せに基づく検出のための装置および方法
本発明による装置は、少なくとも2つの異なる測定モードで動作することができる対物レンズを備える。第1の干渉モードにおいて、測定対象物は、干渉光学測定法によって測定される。第2の画像化測定モードにおいて、光学画像が、たとえばカメラのような検出器アレイで生成され、画像処理ルーチンを施されてもよい。2つの測定モード間の切換えは、対物レンズの照明の種類と、干渉計の参照ビーム経路に配置されることが好ましく、用いられる光のスペクトル組成に応じて参照ビーム経路を動作状態または非動作状態にする素子と、によって行われる。このようにして、2つの測定モード間の簡単かつ迅速な切換えは、対物レンズの交換を必要とすることなく、または対物レンズの移動も必要とすることなく行われる。切換えの迅速さに加えて、干渉分光法によって生じた測定データと画像処理によって生じた測定データとの間の良好な相関が達成される。干渉分光法および画像処理によって生じた測定データは、全く同一の基準座標系で得られる。 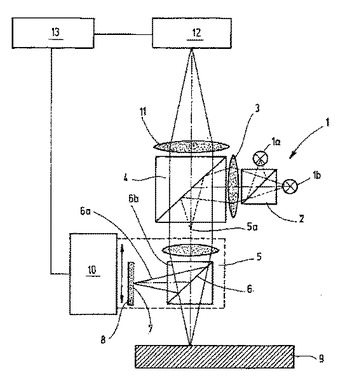 (もっと読む)
(もっと読む)
人の視覚挙動を決定するための方法と装置、並びに眼鏡用レンズのカスタマイズ法
本発明は人の視覚挙動を決定するための方法と装置に関する。本発明の方法は、次のステップ、即ち、被験者の頭部の動きを記録するステップ、被験者の眼球運動を記録するステップ、頭部に対する眼の相対的方位を決定するステップ、及び眼球が各方位に維持されていた時間の量を決定するステップを含む。上記時間の量は、有限区間内の方位の記録を収集し、各区間内の記録の数(頻度)を計数することによって求められる。前記方位は、頭部と眼球の両方に対して角座標を用いて特定される。データは、頭部に固定される発光素子(51)、カメラ(63)及び被験者の視線を引き付けるためのスクリーン(611、612)を備えたデバイスの援助により検知及び処理される。本方法から得られる結果は、眼鏡用レンズの設計をカスタマイズするために用いられる。
 (もっと読む)
(もっと読む)
高さ三角法測定方法及びシステム
高さ三角法測定方法及びシステムが開示されている。当該方法及びシステムは、表面上の物体、例えばバンプ又は小さいウェーハの高さを測定するのに特に有効である。3つのステップが測定を行う。第1のステップは、物体を既知の角度から空間的に非コヒーレントの狭い帯状光でもって照射するステップであり、当該既知の角度が当該光の帯に沿った大きい開口数と前記光の帯に対して垂直方向の小さい開口数とを有する。第2のステップは、物体を、光の帯に沿った大きい開口数と光の帯に対して垂直方向の小さい開口数とを有する既知の角度からイメージングして、物体及び光の帯を含む像を有するステップである。最後のステップは、物体の高さを像上の光の帯の位置から計算するステップである。  (もっと読む)
(もっと読む)
耐振動性干渉法
試験物体に対する走査干渉データが得られる走査干渉法および関連するシステムについて説明する。データには通常、複数の走査位置のそれぞれに対して試験物体の異なる空間箇所のそれぞれに対する強度値が含まれる。各空間箇所に対する強度値によって通常、空間箇所に対する干渉信号が規定される。共通の走査位置に対する強度値によって通常、その走査位置に対するデータ・セットが規定される。各走査位置に対する走査値を得る。一般に、種々の走査値間の走査値増分は非一様である(たとえば、異なっている)。走査干渉データおよび走査値に基づいて、試験物体についての情報を決定する。通常、この決定には、干渉信号の少なくとも一部を、走査値に関して周波数ドメインに変換することが含まれる。  (もっと読む)
(もっと読む)
分配システムにおける測定装置および方法
本発明は、担体に置かれた対象物の存在、位置および/または形状の測定を可能にする測定装置システムならびにかかる測定のため方法の分野に関する。測定装置には、入射光で前記対象物および前記担体を照射するように配置された少なくとも1つの光源と、前記少なくとも1つの光源から所定の距離に置かれた少なくとも1つのセンサであって、前記担体が前記移動方向に移動されるときに前記対象物および前記担体からの反射光を検出することによって、前記対象物および前記担体を繰り返し測定するように、かつ検出光を電気信号に変換するように構成された少なくとも1つのセンサと、電気信号を用いて、前記対象物および前記担体の測定のそれぞれの三次元サブ画像を得るように、かつ1つまたは複数の前記取得サブ画像から、前記対象物および前記担体の三次元画像を得るように構成された画像処理ユニットと、前記三次元画像から、前記担体における前記対象物の存在、位置および/または形状を決定するように構成された計算ユニットと、が含まれる。  (もっと読む)
(もっと読む)
共焦点顕微鏡法の原理に基づく測定装置および方法

光源(1)と、ビームを制限するための絞り構造(3)と、光源から放射されて絞り構造を通過する光(5)を測定すべき物体(6)に収束させるための結像光学系(4)と、物体に当たって後方散乱してから同じ絞り構造または観察光路(7)に配置された別の絞り構造を通過する光(5)に対する受信光学系(10)と、2つの放射感度のあるセンサ素子(13、14)を備える画像受信機(10)とが含まれる。高さ情報を含んだ測定撮影を生成するために、光路の光学距離変更手段(11)が、一方の光源(1)および/または画像受信機(10)と他方の物体(6)との間に配置され、焦点の光学距離(d)を所定の方法で変更可能である。露光時間(T)中における観察光路(7)の光強度に対する、2つのセンサ素子(13、14)での電荷の蓄積量(Q13、Q14)と、結像光学系(4)から画像平面までの光学距離(d)との関連を成立させる。 (もっと読む)
波面操作および改良3D測定方法および装置
【課題】 光学システムにおいて、位相および振幅情報を含む波面分析、ならびに3D測定を実行する方法および装置、特に、光学システムの画像面のような、中間面の出力の分析に基づく方法および装置を提供する。
【解決手段】 薄膜コーティング、または多層構造の個々の層が存在する表面トポグラフィの測定について記載する。多重波長分析を、位相および振幅マッピングと組み合わせて利用する。マクスウェルの方程式の解に基づき、仮想波面伝搬を用いて、波面伝搬および再合焦によって位相および表面トポグラフィの測定を改良する方法について記載する。このような位相操作方法によって、または広帯域およびコヒーレント光源の組み合わせを利用する方法によって、光学撮像システムにおいてコヒーレント・ノイズの低減を達成する。本方法は、集積回路の分析に適用され、コントラストを高めることにより、または1回のショット撮像における3D撮像によってオーバーレイ測定技法を改善する。
(もっと読む)
光波散乱測定データに基づいてプロセスパラメータ値を決定する方法
一実施形態による方法には、あるキャリブレーション基板上に設けられた複数のマーカ構造体の組から、光学的検出装置によりキャリブレーション測定データを得るステップが含まれる。各マーカ構造体の組は、プロセスパラメータの異なる既知の値を用いて生成された、少なくとも1つのキャリブレーションマーカ構造体を含む。この方法には、基板上に設けられ、プロセスパラメータの未知の値を用いて露光される少なくとも1つのマーカ構造体から光学的検出装置を用いて測定データを得るステップと、プロセスパラメータの既知の値およびキャリブレーション測定データに基づくモデルにおいて回帰係数を用いることにより得られた測定データからプロセスパラメータの未知の値を決定するステップとを含む。  (もっと読む)
(もっと読む)
ベルト特性検出方法、及び、ベルト特性検出装置
製品タイヤの品質管理を高めることができるベルト特性検出方法、及び、ベルト特性検出装置を提供することを課題とする。
ベルト特性検出装置は、ドラム21上に貼付されたベルト22の特性を検出する装置であり、ドラム回転軸に沿ったドラム外周面上の直線上の2点の照射位置28R、28Lにレーザ光をそれぞれ照射し、各反射光を計測することにより照射位置28R、28Lの半径方向変位を計測するレーザ変位計と、レーザ変位計から計測信号を受信し、照射位置28R、28Lの半径方向変位の差分を算出する演算部と、演算部で算出された差分の正負と、ドラム21の回転方向と、に基づいて、ベルト22の進行方向Rの端縁22Eの向きが右上がりか左上がりかを検出する検出部と、を備えている。これにより、差分の正負によって、端縁28Eが右上がりか左上がりかを容易に検出することができる。
(もっと読む)
リソグラフィ装置、較正方法、較正プレート、デバイス製造方法及びそれにより製造されたデバイス
本発明の一実施例による方法は、少なくとも1つのアライメント・マーカ40と、少なくとも1つのハイト・プロファイル46とを有する較正プレート38を使用して実行することができる。最初に、アライメント・センサを使用して較正プレートが配置される。次に、ハイト・センサを使用してハイト・プロファイルが測定される。次に、較正プレートを実質的に180度回転し、上記2つの操作が繰り返される。この処理手順によって2つの測定されたハイト・プロファイルが得られ、最適フィットを見出すべく、得られた2つの測定されたハイト・プロファイルが比較される。最適フィットを見出すために実行されるシフトの量を使用して、アライメント・マーカとハイト・センサの測定ポイントのX−Y位置の間の距離が決定される。  (もっと読む)
(もっと読む)
表面の干渉分析のための方法およびシステムならびに関連する応用例
物体の空間的特性を決定するための方法には、2つ以上の界面を含む測定物体からの走査低コヒーレンス干渉信号を得ることが含まれる。走査低コヒーレンス干渉信号には、2つ以上の重なり合う低コヒーレンス干渉信号(それぞれ個々の界面に起因する)が含まれる。低コヒーレンス干渉信号に基づいて、少なくとも1つの界面の空間的特性が決定される。場合によって、決定は、低コヒーレンス干渉信号のサブセットに基づき、信号の全体に基づくのではない。あるいはまたは加えて、決定は、低コヒーレンス干渉信号を得るために用いられる干渉計の機器応答を示す場合があるテンプレートに基づくことができる。 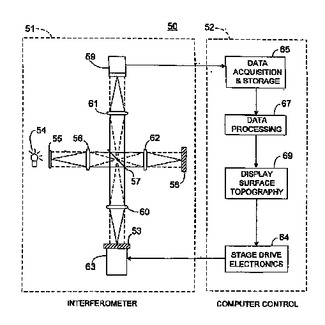 (もっと読む)
(もっと読む)
表面形状を薄膜コーティングを通して求めるための三角測量法及びシステム
基板及び被覆膜を有するオブジェクト及びフォトリソグラフィ装置の一部分の互いに対する位置を決める装置は、フォトリソグラフィ・システムと、ポジショナーと、光学システムと、プロセッサと、を備える。フォトリソグラフィ・システムは、オブジェクトの一部分を第1光パターンで照射するように構成され、かつ基準表面を含む。ポジショナーは、フォトリソグラフィ・システムとオブジェクトとの間の相対位置を変えることができる。光投影装置は、第2光パターンをオブジェクトの被覆薄膜に投影するように構成されている。光学システムは、基板によって拡散散乱される第2光パターンの光を撮像する。プロセッサは、オブジェクトの空間特性を拡散散乱光に基づいて求め、かつポジショナーを動作させてフォトリソグラフィ・システムとオブジェクトとの間の相対位置を変えさせるように構成されている。 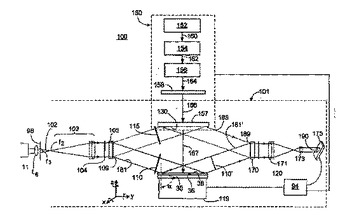 (もっと読む)
(もっと読む)
チップカードを製造するための方法及び装置
本発明は、例えば第1の接触面を備えたチップ・モジュールである第1の構成要素と、例えば第2の接触面を備えたアンテナである第2の構成要素とを備え、この2つの接触面が導電性の塊体に接続されるチップカードを製造するための方法と装置に関する。第1のステップにおいて、カード本体(1)は曲げ装置によってその形状が湾曲部を有するように曲げられ、後で第1の構成要素(2)を受け入れるためのカード本体(1)の凹部(5)内に塗布された塊体(4)がその湾曲部の外側に配置される。第2のステップでは、光源(6)からの少なくとも1つの光線(7)が、塗布された塊体(4)の側方からこの塊体(4)上へ向かうように方向付けされ、これによって、カード本体(1)に対する導電性の塊体(4)の塗布高さ(4a)を、その塗布高さ(4a)を光学的に画像化することにより測定するようになっている。 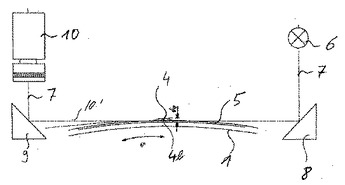 (もっと読む)
(もっと読む)
計測学ツール較正方法および装置
計測学ツール較正方法および装置が開示される。前記装置は、その上に形成された少なくとも一つの較正サイトを備える。前記較正サイトは、基板の表面に配置された少なくとも一つのフィーチャーを有するセルのパターンを含む。前記フィーチャーは、ステップ高さ計測学ツールと位相計測学ツールを較正するために、ステップ高さ計測学ツールと位相計測学ツールによる計測に供される。  (もっと読む)
(もっと読む)
光断層映像法による画像化
【解決手段】 対象物のデジタル画像は、隠され、遮られ、又は視認できない対象物の部分の表示を含んでいる。画像は、歯群の多次元の視覚的表示である。歯群とその表面、輪郭及び形状の特性が判定及び/又は分析される。光は、歯群に向けて送られ、そこから反射される。反射光は基準光と組み合わせられ、歯肉下組織のような隠された領域を含む歯群の特性が判定される。 (もっと読む)
1,101 - 1,116 / 1,116
[ Back to top ]