
Fターム[2F065GG07]の内容
光学的手段による測長装置 (194,290) | 光源 (11,799) | 光源種類 (7,431) | LED (1,755)
Fターム[2F065GG07]に分類される特許
1 - 20 / 1,755
情報処理装置、情報処理装置の制御方法、およびプログラム
接触部検出装置および接触部検出方法
表面処理状況モニタリング装置
検査用照明装置及び検査用照明方法
ガラス基板検査装置及びガラス基板製造方法
3次元形状データ取得装置の光学測定ヘッド
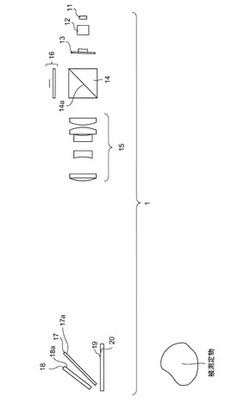
【課題】小型化の3次元形状データ取得装置の光学測定ヘッドを提供する。
【解決手段】投射光学系および撮像光学系は、プリズム型偏光ビームスプリッタ14と、ワイヤーグリッド偏光ビームスプリッタ17と、プリズム型偏光ビームスプリッタ14とワイヤーグリッド偏光ビームスプリッタ17との間に配置される結像光学系15とを有し、MEMS13と撮像手段16は、互いにプリズム型偏光ビームスプリッタ14の偏光分離面を挟み互いに交差する方向に配置され、ワイヤーグリッド偏光ビームスプリッタ17は、MEMS13から出射され結像光学系15を透過した光を透過し、ミラー18により被測定物表面に投射され被測定物表面で反射された光は、ワイヤーグリッド偏光ビームスプリッタ17の偏光分離面で結像光学系15に向けて反射させる構成とし、ワイヤーグリッド偏光ビームスプリッタ17の偏光分離面と、ミラー18の反射面とは互いに非平行とした。
(もっと読む)
撮像装置およびアライメント装置

【課題】透明な平板状の物体の一方主面を、他方主面側から該物体を介して撮像する技術において、特に対象物が薄い場合でも支障なく撮像を行うことのできる技術を提供する。
【解決手段】ブランケットBLを吸着保持する吸着ステージ51の上面510と、アライメントパターンAP2を下方から撮像するための石英窓52aの上面520とを同一平面とせず、石英窓52aの上面520を下方に後退させて配置する。ブランケットBLと石英窓52aとが部分的に接触することにより生じる干渉縞が画像に写り込むのを防止することができる。
(もっと読む)
変位測定方法および変位測定装置
【課題】特異な輝度を持つ画素に影響されない重心位置算出を行い、変位測定の精度を向上する変位測定方法および変位測定装置を得る。
【解決手段】計測対象1にスリット光3を照射するスリット光照射装置2と、スリット光3を計測対象1に照射することによって生成される光切断線4を撮影するカメラ5と、カメラ5により得られた光切断線像から計測対象1の変位を求める画像処理装置7と、を備え、画像処理装置7は、カメラ5により得られた光切断線像の重心位置演算方向の各画素の輝度を最小二乗法で理想的な輝度分布に近似させた後、さらに輝度値と近似値の差分を用いて重み付き最小二乗法で理想的な輝度分布に再近似させ、その分布の期待値から光切断線像の重心位置を算出して計測対象1の変位を求める。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】通常のカメラによっては鮮明な環境情報を取得することが困難な環境に無人走行体が投入された場合にも、無人走行体を正確、容易かつ高能率に遠隔操縦可能な遠隔操縦システムを提供する。
【解決手段】無線無人走行体5に、レーザ光走査式三次元測距装置106と、往路前方カメラ112と、メインカメラ113と、復路前方カメラ115と、俯瞰カメラ118とを搭載する。安全な場所に設置された表示装置に、レーザ光走査式三次元測距装置106により検出された三次元画像と、各カメラ112,113,118により撮影された映像を表示する。オペレータはこれらの三次元画像及びカメラ画像を参照しながら、無線無人走行体5の遠隔操縦を行う。
(もっと読む)
厚み計測装置および厚み計測方法
【課題】一方主面に薄膜が形成された透明で平板状の基材の厚みを計測する厚み計測装置および厚み計測方法において、薄膜の光学的特性に影響されることなく、基材の厚みを高精度に計測する。
【解決手段】対物レンズ455の合焦位置FPを、ブランケットBLの下面BLtよりも下方位置Zminから上面BLfよりも上方位置Zmaxまで、一定の刻みΔZでステップ的に上昇させながらその都度撮像を行う。撮像位置と受光強度との関係において、ブランケットBLの上面BLfおよび下面BLtに対応するピーク間の距離から、ブランケットBLの厚みDzを求める。
(もっと読む)
LED照明を用いた観察装置、膜厚むら検出装置並びに膜厚むら検出装置付塗布装置
【課題】 発光ダイオードを多数配列した面照明を使用した場合であっても、LEDの全点灯までの時間遅れの影響を受けることなく、検査時の照明光量を一定に保ちつつ、短時間で検査を行うことができる、膜厚むらの検出装置並びに当該装置を具備した塗布装置を提供する。
【解決手段】 基板上に形成された皮膜の膜厚むらを検出する装置で、
基板保持部と、光源部と、撮像部と、制御部と、検査部とを備え、
光源部は複数の発光ダイオードを配置して構成された面照明であり、
制御部は、発光指令信号を出力してから複数の発光ダイオードが全点灯状態になるまでの点灯遅れ時間を登録する点灯遅れ時間登録部と、発光指令信号を入力してから登録された点灯遅れ時間経過後に、撮像部に対して撮像指令信号の出力を行う撮像ディレイタイマ部とを備えたことを特徴とする、膜厚むら検出装置。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム
【課題】背景が含まれる場合であっても、背景の明るさの影響を低減して検査対象物表面の明るさを自動的に調整することができる画像処理装置、該画像処理装置で実行する画像処理方法及びコンピュータプログラムを提供する。
【解決手段】検査対象物を含む撮像領域を撮像する撮像部と、撮像領域を前記撮像部で撮像した画像に対して画像処理を実行する画像処理部とを備える。画像処理部は、撮像部から出力された画像の撮像領域内に設けられ、各々が複数の画素を含む複数の小領域ごとに、検査対象物が存在する可能性を示す特徴量を算出する。算出した特徴量に基づいて、少なくとも検査対象物を含む画像の明るさの評価値を算出し、算出した評価値に基づいて、画像の明るさを調整するための調整信号を出力する。
(もっと読む)
形状測定装置、構造物製造システム、構造物製造方法
【課題】計測精度を向上する。
【解決手段】形状測定装置は、光源からの光に照らされている被検物を撮像する撮像素子と、撮像素子の受光面(A17)と共役な共役面(A0)を受光面と非平行になるように形成する結像光学系と、撮像素子による撮像の結果から光に照らされている部分の像の位置を検出することにより、被検物の形状に関する情報を取得する形状情報取得部と、を備える。結像光学系は、像を形成する光束が通る範囲において、受光面を含む面と共役面を含む面との交線に直交する直交面上の像面の略中心と物体面の略中心とを直線で結んだときの軸に関して断面形状が非対称であり、かつ交線から最も遠い部分と、交線から最も近い部分とについて、遠い部分から近い部分に向うにつれて直交面上の断面形状の寸法が縮小又は拡大するレンズ要素(52、53)を含むレンズ群(50)を有する。
(もっと読む)
位置検出装置および露光装置
【課題】波長差に起因する計測誤差を低減して高精度な位置検出を行う位置検出装置を提供する。
【解決手段】基準マークSMを利用して被検出体WMの位置を検出する位置検出装置であって、第1の波長帯域を有する計測光を用いて被検出体WMを照明する第1の照明光学系5と、第2の波長帯域を有する基準光を用いて基準マークSMを照明する第2の照明光学系13と、被検出体WMからの光束および基準マークSMからの光束を検出する検出光学系10と、検出光学系10で検出された光束に基づいて被検出体WMの位置を検出する位置検出部48とを有し、基準光の第2の波長帯域は、計測光の第1の波長帯域の上限と下限との間に設定されている。
(もっと読む)
形状測定装置
【課題】被測定物に対する面方向の分解能や測定位置の変更を容易に行うことができる形状測定装置を提供する。
【解決手段】光源10と、光源10からの光を2つの光束に分割して、一方の光束を被測定物Tに照射し、他方の光束を参照ミラー40に照射させると共に、これらから反射された光を合波させるスプリッタ20と、スプリッタ20によって合波された光により得られる画像を撮像するCCD50と、2つの傾き状態に制御される複数の微小ミラーを有するDMDと、複数の微小ミラーを制御して被測定物Tや参照ミラー40への照射光等を絞り込み、その状態で撮像された画像に基づき、測定点の高さを測定する制御手段と、を備えることを特徴とする。
(もっと読む)
非球面形状計測装置
【課題】非球面形状を有する被検面を高精度に計測するのに有利な非球面形状計測装置を提供する。
【解決手段】光源1から射出された光を非球面形状を有する被検面14に照射する照明光学系7と、前記被検面に照射する光の一部を遮光する遮光板6と、前記照明光学系及び前記遮光板を介して光が照射された前記被検面の一部の領域から反射される光束を計測するセンサ10を有する撮像系と、前記センサにより計測されたデータから前記被検面の形状を算出する算出手段と、を有し、前記遮光板は、光軸に対し前記被検面の一部の領域の反対側が遮光されるように構成され、前記被検面の一部の領域から反射される光束と光軸との交点を複数の計測光交点とした場合、前記複数の計測光交点のうち前記被検面に最も近い計測光交点16と前記被検面との間に配置される。
(もっと読む)
厚み測定方法、厚み測定装置、および厚み測定システム
【課題】立体構造を有する物体の厚み分布を、短時間に、かつ容易に測定する。
【解決手段】厚み測定方法は、測定対象物6に光を照射する光照射工程(S1)と、測定対象物6に照射された光が、測定対象物6を透過しているときに、測定対象物6への光の照射方向とは異なる所定の方向から、測定対象物6を撮像する撮像工程(S2)と、その撮像画像に基づいて、測定対象物6の厚み分布を測定する測定工程(S3)と、を含む。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
三次元表面検査装置および三次元表面検査方法
【課題】鏡面反射が酷い計測対象物であっても、簡単な構造により低コストで高精度かつ高速に表面の凹みや大きな疵などの三次元的欠陥を検査することが可能な三次元表面検査装置の提供。
【解決手段】計測対象物Xを撮影するカメラ装置3と、曲面状に配設されて計測対象物を覆うフィルタ膜と、フィルタ膜の曲面状に沿って周期的な強度分布を持つ曲面状強度分布のパターン光を投影し、フィルタ膜を介して計測対象物に投影する曲面パターン光投影手段5と、カメラ装置3により撮影された画像に対し、曲面状強度分布を直線状強度分布に変換するデコード処理を行うことで、計測対象物の表面の三次元的欠陥を検出する欠陥検出手段13とを含む。
(もっと読む)
雲の含水率を決定する方法
【課題】雲の含水率を決定する方法を提供する。
【解決手段】雲の含水率は、雲の水滴サイズ分布から導出される。雲の水滴のサイズ分布を決定する方法は、雲の深さを電磁放射ビームによりサンプリングすることと、雲から戻った電磁放射のエコー強度を検出器により測定することと、測定エコー強度から測定光減衰係数を決定することと、測定エコー強度から測定後方散乱係数を決定することと、測定光減衰係数及び測定後方散乱係数からライダー比を決定することと、ライダー比から水滴の形状パラメータ(μ)及びメジアン体積径(DMVD)を含む値ペアを決定することと、値ペア(μ,DMVD)を使用して水滴のサイズ分布を決定することとを含む。
(もっと読む)
1 - 20 / 1,755
[ Back to top ]