
Fターム[2F065JJ23]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 数個 (171) | 2個 (75)
Fターム[2F065JJ23]に分類される特許
1 - 20 / 75
物体の光干渉測定装置および光干渉測定方法
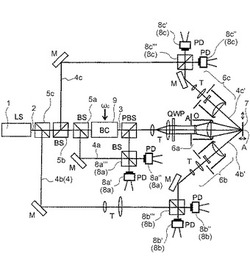
【課題】さらに付加的な情報の取得が可能で、かつ堅牢な装置構造と高度な測定精度とを有する光干渉測定技術の提供。
【解決手段】光干渉測定装置は、光源1からの出発ビーム2を測定ビーム3と第1の参照ビーム4aとに分割するビームスプリッタ5aと、光の重ね合わせ手段と、第1の検出器8aとを備える。重ね合わせ手段と第1の検出器8aとは互いに連携する。物体7によって反射された測定ビームと第1の参照ビームとが第1の検出器の検出面で重ね合わされる。ビームスプリッタ5aは、出発ビーム2を測定ビーム3と、第1の参照ビーム4aと、少なくとも第2の参照ビーム4bとに分割する。重ね合わせ手段と互いに連係する第2の検出器8bが備えられ、物体7によって散乱させられた第1の受信ビーム4b’としての測定ビームと第2の参照ビーム4bとが第2の検出器8bの検出面で重ね合わされる。
(もっと読む)
測定装置

【課題】スピンドルに取り付けられて高い回転数で回転する極小径丸棒若しくは極小径工具の動的振れを測定可能な極めて実用性に秀れた測定装置の提供。
【解決手段】光源と、光源からの光線を被測定部材へ導くレンズ系と、被測定部材を介して光線を受光する複数のフォトダイオードとを備える光学系を有し、フォトダイオードでの受光量をもとに被測定部材の位置若しくは振れ量を測定する測定装置であって、光学系の光軸方向視において、複数のフォトダイオードにして被測定部材の軸心と交差する辺部が全て直線であり、複数のフォトダイオード間には、被測定部材の軸方向に対して傾斜する少なくとも1つのギャップを設け、このギャップの両端部は被測定部材の外形より外方に位置させ、ギャップを形成するフォトダイオードの辺部以外の被測定部材の軸心と交差する辺部がギャップと平行でないように構成する。
(もっと読む)
光センサ、及び、その製造方法
【課題】光の左右比の検出精度の低下が抑制された光センサ、及び、その製造方法を提供する。
【解決手段】半導体基板(10)に受光素子(20)が形成され、受光素子(20)の形成面(10a)上に、透光膜(30)を介して遮光膜(40)が形成され、遮光膜(40)に透光用の開口部(50)が形成された光センサであって、仮想直線(VL)を介して線対称の関係にある一対の受光素子(21,22)及び一対の開口部(51,52)を有し、形成面(10a)に直交する高さ方向に沿う光を、開口部(51,52)を介して受光素子(21,22)に照射した際に、一対の受光素子(21,22)から出力される出力信号に基づいて、高さ方向に沿う光が開口部(51,52)を介して受光素子(21,22)に入射した際に出力される一対の受光素子(21,22)の出力信号が互いに一致するように、各出力信号を補正する。
(もっと読む)
人体検知装置及び該人体検知装置を備えた画像処理装置
【課題】人の接近を高精度に判定することができる人体検知装置等を提供する。
【解決手段】それぞれ一対の正負電極10a,10b,20a,20bを有する第1及び第2の焦電型センサ10,20と、各焦電型センサを被覆するレンズ3を備える。垂直状被取付面51に対して直交する面からなる検知エリア6において、第1の焦電型センサの正負電極に対応する第1の正極視野100aと負極視野100b、第2の焦電型センサの正負電極に対応する第2の正極視野200aと負極視野200bを含む検知ブロック300、301が、第1の正極視野と負極視野を結ぶ仮想線100cまたはその延長線と、第2の正極視野と負極視野を結ぶ仮想線200cまたはその延長線が交差する態様で形成されている。交点から被取付面51への垂線について、各仮想線同士が線対称に形成されている。
(もっと読む)
計測面傾き計測装置、プロジェクタ及び計測面傾き計測方法
【課題】投影面傾き計測装置、プロジェクタを小型化する。
【解決手段】投影面傾き計測装置11は、投光ユニットと、入射角センサと、を備える。入射角センサは、水平方向、垂直方向にそれぞれ、2つずつ配置される。投光ユニットは、スクリーンS上の水平方向、垂直方向に、それぞれ、設定された2つの測距点に光を投光して投光スポットを形成する。入射角センサは、投光スポットからの反射光を受光して、その入射角を検出する。この入射角センサは、2分割受光素子からなり、2つの受光素子に入射した光の受光割合に基づいて、反射光の入射角を検出する。このような構成により、位相センサで必須のレンズが不要となり、レンズの焦点距離を確保する必要もないので、小型化も可能となる。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 シリンドリカルレンズ59が、ガラス管Gに出射されるレーザ光をY軸線方向に集光させて、ガラス管GにX軸線方向に延びたライン状のレーザ光を照射する。Y軸方向サーボ回路119は、4分割フォトディテクタ62及びY軸方向エラー信号生成回路118によって検出されたY軸方向エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に照射されるようにガルバノミラー56を回転駆動するモータ57をサーボ制御する。また、Y軸周り角度サーボ回路122は、4分割フォトディテクタ62及びY軸周り角度エラー信号生成回路121によって検出されたY軸周り角度エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に垂直に照射されるようにガルバノミラー54を回転駆動するモータ55をサーボ制御する。
(もっと読む)
透光性板状物体の厚さ測定装置
【課題】 透光性板状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガラス板Gの表面及び裏面で反射させて、反射光をラインセンサ55に導いてガラス板Gの厚さを測定する。測定用レーザ光は、Y軸線回りに回転可能なガルバノミラー45及びX軸線周りに回転可能なガルバノミラー51を介してガラス板Gに照射される。サーボ用レーザ光も、ガルバノミラー45,51を介してガラス板Gに照射され、反射光はガルバノミラー45,51を介して4分割フォトディテクタ66に導かれる。4分割フォトディテクタ66により、ガラス板Gの表面のX軸及びY軸線回りの傾きが検出され、この傾きに応じてガルバノミラー45,51を駆動するサーボ制御により、測定用レーザ光をガラス板Gに対して常に一定方向から入射させる。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガルバノミラー35で反射させてガラス管Gに照射し、ガラス管Gの外周面で反射する反射光及び内周面で反射する反射光をラインセンサ39で受光し、反射光の受光位置からガラス管Gの厚さを検出する。サーボ用レーザ光源40からのサーボ用レーザ光をガルバノミラー35で反射させて、ガラス管Gにおける測定用レーザ光の照射位置又はその近傍位置にZ軸方向から照射する。フォトディテクタ48でガラス管Gからのサーボ用レーザ光の反射光を受光し、Y軸方向エラー信号生成回路119、Y軸方向サーボ回路120及びY軸方向ドライブ回路121が、モータ36を駆動制御することにより、測定用レーザ光の光軸がガラス管Gの中心軸と交差するようにガルバノミラー35のX軸線周りの回転をサーボ制御する。
(もっと読む)
3次元形状測定装置
【課題】MEMSミラーを用いてレーザ光を走査する3次元形状測定装置において、使用開始から長期間が経過してもミラーの回転角度を精度よく取得でき、測定精度を一定に保つことができるようにする。
【解決手段】
回転可能に支持されたミラー14aと供給される電気信号に応じてミラー14aを回転させて変位させる駆動回路とが一体的に形成された第1ミラー14を設ける。ミラー14aは、それぞれレーザ光を反射可能な第1反射面及び第2反射面を有する。第1反射面に測定装置と測定対象物OBとの距離を測定するためのレーザ光を照射する。第2反射面にミラー14aの回転角度を検出するためのレーザ光を照射する。第2反射面からの反射光を受光する受光センサ26を設ける。受光センサ26における反射光の受光位置からミラー14aの回転角度を計算するミラー角度検出回路42を設ける。
(もっと読む)
形状計測装置
【課題】従来に比べてパターンの照射範囲を容易に設定可能で、高精度で距離計測が可能な形状計測装置を提供する。
【解決手段】形状計測面を撮像する撮像部11と、撮像部からのタイミング信号にて動作制御され、投光パターン15を形状計測面に投影する照射部7と、投光パターンの設定を行う投光パターン設定部51と、投光パターン及び撮像画像により、投光パターンの照射範囲を設定する照射範囲設定部53とを備えた。
(もっと読む)
変位計測方法及び変位計測装置
【課題】光学素子の傾き精度の影響を受けず、構成が簡単かつ小型化が可能であって、回折格子の面方向の位置ずれに対しても影響が小さく、光学分解能の調整が可能な変位計測を行う。
【解決手段】レーザ光源12からのレーザ光13を、コリメータレンズ14によって平行光15とし、第1の回折格子16を通過させて半透過半反射ミラー22まで進行させ、一部を反射させて第1の回折格子16を通過する第1の戻り光Lrev1とする。平行光15の残りは全反射ミラー24まで進行して反射され、半透過半反射ミラー22と第1の回折格子16を通過する第2の戻り光Lrev2となる。第1の回折格子16による第1,第2の戻り光Lrev1,Lrev2の所定次数の回折光を、第1の光センサ28で光量検出し、半透過半反射ミラー22に対する全反射ミラー24の軸方向の相対的移動量に対応する干渉縞もしくはその信号から変位量を得る。
(もっと読む)
非接触変位計測装置
【課題】短時間で且つ容易にワークの変位量を検出可能な非接触変位計測装置を提供する。
【解決手段】非接触変位計測装置は、ワーク12を載置可能に構成された測定テーブル13と、ワーク12の変位量を計測する第1〜第3レーザプローブ35a〜35cと、Y軸に沿って測定テーブル13から相対移動可能に構成され、Z軸方向に広がり且つX軸方向の測定テーブル13の両端に端部を有するゲート形状を有する第1ゲート状駆動部14Aとを備える。第1〜第3レーザプローブ35a〜35cは、ワーク12に光を照射すると共にその光に基づく反射光を受光し且つその反射光に基づきワーク12の変位量を計測する。第1ゲート状駆動部14Aは、ワーク12に対して少なくとも2方向からの光を照射させるように第1〜第3レーザプローブ35a〜35cを配置可能に構成されている。
(もっと読む)
光学式変位計
【課題】クロマティックコンフォーカル変位計の高分解能且つ高速応答化及び小型化を可能とする。
【解決手段】対物レンズ12に対し、測定対象(8)と反対側の共焦点に広帯域光源22を配置し、測定対象からの反射光が戻るときの共焦点位置に空間フィルタを設けて透過させ、測定対象に合焦した波長の被測定光を抽出し、該被測定光の波長を特定することにより、測定対象の位置を測定する光学式変位計において、コリメートされて一方向に伝播される被測定光を、その伝播方向Zと直交する2方向のX、Yの直線偏光に分ける偏光子52と、該2方向の直線偏光を通過させて、光波長に応じた位相差を持つ楕円偏光とする波長板54と、該楕円偏光を、XY間の2つの方向の偏光成分に分ける偏光分離素子56と、各偏光成分の光量を検出する受光素子58A、58Bとを備え、該受光素子で検出した光量信号A、Bを用いて、(A−B)/(A+B)の演算を行う。
(もっと読む)
光干渉計を用いた変位計測装置
【課題】 可動部に傾きが生じても、細かい干渉縞の発生を防止することが可能な変位計測装置を提案する。
【解決手段】 変位計測装置1は、第一のベース2と、第一のベース2に対して可動に設置された第二のベース3と、を有している。第一のベース2には、光源4と、光源4から照射される光を測定光と基準光とに分岐するビームスプリッタ5と、ビームスプリッタ5からの基準光を第一の反射板6の方に向けて反射する第三の反射板8と、第一の反射板6で反射された基準光と第二の反射板7で反射された測定光との干渉光を検出する光検出器9およびλ/4波長板10が設けられている。第二のベース3には、反射面が第二の反射板7の反射面と平行に設置されている第一の反射板6およびビームスプリッタ5からの測定光を反射する第二の反射板7が設けられている。
(もっと読む)
反射型光電センサ
【課題】遠距離範囲の検出分解能を落とさずに、不感帯の範囲を縮小することができる反射型光電センサを提供する。
【解決手段】投光レンズ1と、前方に光を射出する遠距離用投光素子2と、受光レンズ3と、前方から入射する光を受光する受光素子4と、前方に光を射出する近距離用投光素子7とをセンサボディ6内に備え、投光レンズ1の焦点に遠距離用投光素子2を配置し、受光レンズ3の焦点に受光素子4を配置し、投光レンズ1および遠距離用投光素子2の組みと受光レンズ3および受光素子4の組みとの間に、近距離用投光素子7が設けられる反射型光電センサにおいて、受光レンズ3の焦点距離が投光レンズ1の焦点距離よりも短く、受光レンズ3の前面が投光レンズ1の前面および近距離用投光素子7の前面より後方に配置され、カバー61aをカバー61bよりも後方に配置して、空間63cを形成する。
(もっと読む)
フォーカシング制御装置および非接触測定装置
【課題】測定面からの反射光の光量に影響されることなく、安定したオートフォーカスができるフォーカシング制御装置を提供する。
【解決手段】フォーカスエラー信号Sは、ピンホール方式で生成される。信号生成部9からの出力がフォーカスエラー信号Sか否かの判断では、初めにデフォルトのしきい値として第1しきい値N1および第2しきい値N2が用いられる。この判断でフォーカスエラー信号Sと判断されない場合は、第1しきい値N1を第3しきい値N3に、第2しきい値N2を第4しきい値N4に補正して再度フォーカスエラー信号Sの判断をする前に、信号生成部9からの出力の波形を評価する。
(もっと読む)
欠陥検出方法の高感度化
【課題】光学式欠陥検査装置または光学式外観検査装置で検出した欠陥を電子顕微鏡等で詳細に観察する装置において、観察対象の欠陥を確実に電子顕微鏡等の視野内に入れることができ、かつ装置規模を小さくできる装置を提供する。
【解決手段】光学式欠陥検査装置または光学式外観検査装置で検出した欠陥を観察する電子顕微鏡5において、欠陥を再検出する光学顕微鏡14を搭載し、この光学顕微鏡14で暗視野観察する際に瞳面に分布偏光素子及び空間フィルタを挿入する構成とする。
(もっと読む)
微小突起物検査装置
【課題】高速,かつ高精度に試料上の微小突起物の高さ検査を行えるようにする。
【解決手段】光源201からの光は第1のハーフミラー221、偏光器202、結像レンズ203,204、折り返しミラー205、対物レンズ206を介して試料2001に入射する。試料2001からの反射光は同一の経路を逆に通り、第1のハーフミラー221で反射し、第2のハーフミラー222で2本の検出ビームに分割される。2本の検出ビームは各々第1の検出側結像レンズ2081における第1のナイフエッジ2071と第2の検出側結像レンズ2082における第2のナイフエッジ2072によって半円状の光ビームに整形され、各々第1の光センサ2101と第2の光センサ2102によって検出される。第1のナイフエッジ2071と第2のナイフエッジ2072は直角方向となっているので、試料2001への入射ビームの偏向方向によらず均一な感度で,試料上の微小突起物の検査を高速で行うことが可能となる。
(もっと読む)
高さ測定方法、荷電粒子ビーム描画方法および荷電粒子ビーム描画装置
【課題】受光素子のオフセット電圧の影響を低減して、高精度で試料表面の高さ測定を行うことのできる方法と、高精度で試料表面の高さ測定を行うことにより、試料の所望の位置に描画することのできる荷電粒子ビーム描画方法および荷電粒子ビーム描画装置を提供する。
【解決手段】高さ測定部40からの信号は、信号処理部60を経て、高さデータ処理部70に送られる。次いで、オフセット電圧値除去部71において、測定値からオフセット値メモリ部80に登録されたオフセット値を差し引いた値を用いて、マスク2の表面の高さデータZ1が作成される。その後、高さ補正部72において、高さデータZ1に対して所定の補正を行い、マスク2の表面の高さデータZ2を得る。
(もっと読む)
検出装置および検出方法
【課題】気体や液体等の媒体中を、略一定速度で移動する粒子サイズを簡易な構成且つ簡易な演算処理で検出する。
【解決手段】液滴の移動速度Uを検出し、液滴の飛翔方向の幅が所定幅Lである孔44a,44bを備え、これらの孔の有効視野において液滴の占める面積情報を所定時間置きに複数回取得し、取得した面積情報A1〜Anを取得回数nで平均化し、複数回取得に要した総時間Tを、液滴が上記所定幅Lを移動するのに要する時間L/Uで除算して、取得回数nを正規化した正規化枚数Nを得て、平均面積情報Bと正規化された取得回数Nとの積を実粒子面積Sとし、実粒子面積を1.5乗して実粒子体積Vを得る。
(もっと読む)
1 - 20 / 75
[ Back to top ]