
Fターム[2F065QQ21]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 形状特定のためのパラメータ抽出 (463)
Fターム[2F065QQ21]に分類される特許
141 - 160 / 463
三次元形状計測装置、キャリブレーション方法、およびロボット

【課題】三次元形状計測における高さ方向のキャリブレーションを効率的に且つ高精度に行う。
【解決手段】階段形状のキャリブレーション用ブロックと、これが載置される載置台40を移動させる載置台駆動部30と、撮像画像から光切断線を検出する光切断線検出部22と、光切断線から特徴点を検出して特徴点座標値を計算し、この特徴点座標値と載置台40の移動ピッチとキャリブレーション用ブロックの所定の属性データとを関連付けた特徴点情報を生成する反射位置計算部23と、特徴点座標値と移動ピッチとから世界座標系における特徴点の三次元座標値に変換する変換行列を計算する変換行列計算部24と、特徴点情報と変換行列とに基づいて、撮像画像の画像平面の二次元座標値とこれに対応する世界座標系の三次元座標値との組み合わせを求めて校正用データを生成する三次元座標変換部25とを備えた。
(もっと読む)
帯状体の形状測定装置、方法及びプログラム

【課題】圧延材等の帯状体に空間定在波が発生した場合にも正確な形状測定を可能とする。
【解決手段】長手方向に搬送される圧延材101の表面に光源106から長手方向のスリット光106aを照射し、そのスリット光106aを2次元カメラ107により撮像する。形状測定装置は、2次元カメラ107で得られた画像データから光切断法により圧延材101の長手方向の板高さ分布を計算する板高さ分布計算部2と、板高さ分布計算部2で計算した板高さ分布に基づいて圧延材101に空間定在波104が発生しているか否かを判定する判定部3と、判定部3で空間定在波104が発生していると判定した場合、板高さ分布計算部2で計算した板高さ分布を用いて圧延材101の走行軌道Sを計算する走行軌道計算部4と、走行軌道計算部4で計算した走行軌道Sに沿って圧延材101の形状(平坦度)を指す指標である板伸び率を計算する形状測定部5とを備える。
(もっと読む)
位置姿勢計測装置及び位置姿勢計測プログラム
【課題】初期設定でユーザに手間を掛けることなく正確にカメラポーズ及び対象の3次元形状を計測できるようにする。
【解決手段】初期値算出部11は、平面上に撮像対象が配置されている状態を、球形等の近似似撮像対象が配置されている状態であると近似し、初期カメラポーズを決定し、3次元座標を算出する。また、初期値算出部11は、初期値の候補から実際の3次元シーンの真値に近い値を選択し初期値として設定する。これにより、ユーザによる事前の作業なく、初期値として実際の3次元シーン形状に近い形状を指定できる。
(もっと読む)
3次元形状計測方法、3次元形状計測装置、及びプログラム
【課題】1回のパターン投影、及び撮影により計測対象の3次元形状を復元する。
【解決手段】投影装置1は、所定の投影パターン(円形白黒コード群)を計測対象4に投影する。撮像装置2は、投影パターンが投影された計測対象4を撮影する。コード抽出部3−2は、撮影した画像からコードを抽出する。コード識別部3−3は、抽出したコードからコード番号を識別する。ワード生成部3−4は、着目コード番号の4近傍のコード番号を探索してワードを生成する。対応点算出部3−5は、生成されたワードを用いて、撮影画像中のワードと投影パターンのワードとの対応をとり、対応点の座標を得る。3次元位置算出部3−6は、3角測量の原理を用いて、撮影画像中のワードの中心座標と投影パターンの中心座標とから3次元座標位置を算出する。
(もっと読む)
キャリブレーション方法
【課題】簡単な構成で正確に等距離に配置された3つの基準点を提供することが可能なキャリブレーション用マーカを用いるキャリブレーション方法を提供することを目的とする。
【解決手段】三角形のマーク(100)を用いて、車両に搭載されたカメラのパラメータの調整を行うことを特徴とするキャリブレーション方法。三角形のマークは、両端部に接続構造を有する第1部材(110)と、第1部材と長手方向の長さが同じであって且つ両端部に接続構造を有する第2部材(120)と、第1部材と長手方向の長さが同じであって且つ両端部に接続構造を有する第3部材(130)を有し、第1部材、第2部材及び第3部材のそれぞれの接続構造を接続させることによって形成される。
(もっと読む)
三次元形状計測装置および三次元形状計測装置のキャリブレーション方法
【課題】三次元形状計測におけるキャリブレーションを効率的に且つ高精度に行う。
【解決手段】ガラス材で構成され、上面、内層面、底面に、光源部11からスリット光が
照射されたときに輝線を映すパターンが形成されたキャリブレーション用ブロックと、複
数の特徴点を有する二次元パターンの撮像画像に基づいて、カメラパラメーターを計算す
るカメラパラメーター計算部22と、上面、内層面、底面に形成されたパターン上の輝線
の画像から特徴点を検出して二次元座標値を計算し、この二次元座標値とキャリブレーシ
ョン用ブロックの寸法データとに基づいて特徴点の三次元座標値を計算し、スリット光の
広がりを示す平面を表す式の係数を計算するスリット光平面計算部24と、カメラパラメ
ーターと平面を表す式の係数とに基づいて、二次元座標値から三次元座標値に変換するた
めの座標系変換係数を計算する三次元座標計算部25とを備えた。
(もっと読む)
位置推定装置、位置推定方法及びプログラム
【課題】現在の位置が既に登録済みの場所であるか、未登録の場所であるかを認識することができる位置推定装置、位置推定方法及びプログラムを提供する。
【解決手段】位置推定装置1は、入力画像から局所特徴量を抽出する特徴量抽出部11と、各登録場所と局所特徴量が対応づけられて保存されているデータベースを参照し、入力画像と登録場所とのマッチングを求めるマッチング部13と、マッチングが所定の閾値以上である場合に、選ばれた登録場所の近傍の登録場所を含めて類似度を算出する類似度算出部15と、類似度が所定の閾値以上である場合に、当該入力画像が登録場所であると認定する登録場所認定部17とを有する。
(もっと読む)
浮遊する粒子の位置測定法
【課題】粒子像のボケを利用して1台のカメラで粒子の三次元定量的情報を計測するデフォーカス法において、粒子数が多い場合や粒子が合焦点に近いところに位置する場合でも、粒子の識別ができる手法を提供する。
【解決手段】カメラのレンズに装着するマスクの3箇所(正三角形の各頂点)に孔を設け、それぞれの孔に赤、緑、青の色フィルタを取り付けて撮影すると、浮遊粒子が合焦点位置にあるときには粒子像は1点に集中して1つの白色輝点として観察されるが、合焦点位置から外れると赤、緑、青3輝点で形成される三角形が観測される。それぞれの輝点の中心をつないでできる三角形に外接する外周円を想定し、その半径を求め、その三角形の向きを正負で表し、予め作成しておいた較正曲線に当てはめて、粒子の合焦点位置からの光軸方向への位置のずれ量を算出する。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と平行な垂直面以外の任意平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定する走査部と、距離に基づいて対象物の任意平面上の断面形状に相当する第1のパターンを算出する算出部と、人物の両脚に相当する任意平面上の断面形状の第2のパターンが予め複数登録されている記憶部と、第1及び第2のパターンを比較して、比較結果に基づいて対象物から人物の脚の特徴を抽出する抽出部と、抽出した特徴に基づいて対象物が人物であるか否かを判断する判断部を備えるように構成する。
(もっと読む)
3次元位置合わせにおける照合方法およびそのプログラム
【課題】精度よく3次元位置合わせが可能な照合方法及びプログラムを提供すること。
【解決手段】対象物の画像データから第1及び第2の3次元復元点集合、第1及び第2特徴量集合を求めるステップS2〜4と、
第1及び第2特徴量集合を照合して、第1及び第2の3次元復元点集合の対応点を決定するステップS5〜10とを含み、
第1及び第2の3次元復元点集合がセグメントの3次元位置座標を含み、
第1及び第2特徴量集合がセグメントの頂点に関する3次元情報を含み、
ステップS5で、第1及び第2の3次元復元点集合のセグメントの初期照合を行い、
ステップS6で、第1特徴量集合の中から特徴点を選択し、
ステップS7で、選択された特徴点を含む調整領域を指定し、
ステップS8において調整領域に含まれる第1及び第2の3次元復元点集合のセグメントに関して照合の微調整を行い、
調整領域を拡大及び特徴点を選択する毎にステップS6〜8を実行する。
(もっと読む)
光学装置
【課題】半導体ウェハ表面や表面近傍に存在する異物や欠陥等に由来して発生する散乱光の強度が照明方向に依存する異方性を有する場合であっても主走査方向の回転角に依存せずに均一な感度で異物や欠陥等の検査が可能な表面検査装置を実現する。
【解決手段】光源11からの光はビームスプリッタ12で、略等しい仰角を有し、互いに略直交する2つの方位角からの2つの照明ビーム21、22となり、半導体ウェハ100に照射され、照明スポット3、4となる。照明光21、22による散乱・回折・反射光の和を検出するとウェハ100自身又はそこに存在する異物や欠陥が照明方向に関する異方性の影響を解消できる。これにより、異物や欠陥等に由来して発生する散乱光の強度が照明方向に依存する場合であっても主走査方向の回転角に依存せずに均一な感度で異物や欠陥等の検査が可能となる。
(もっと読む)
リソグラフィ用の検査
位置姿勢計測装置、位置姿勢計測方法およびプログラム
【課題】 距離画像の計測値の欠損に起因した精度低下を軽減することが可能な位置姿勢の計測技術を提供すること。
【解決手段】 対象物体の位置姿勢を計測する位置姿勢計測装置は、対象物体の距離画像上の画素に対して距離が最小となる形状モデル上の点が、第1の探索部により得られた欠損モデル領域内に存在するか否かを判定する判定部と、形状モデル上の点が欠損モデル領域内に存在すると判定された場合に、第2の探索部により得られた、距離が最小となる距離画像上の画素と形状モデル上の点との組み合わせに補正を施す補正部と、補正が施された、距離画像上の画素と形状モデル上の点との組み合わせにおいて、距離画像上の画素と形状モデル上の点との間の距離の総和を最小にする形状モデルの位置及び姿勢を、対象物体の位置及び姿勢の計測値として算出する算出部と、を備える。
(もっと読む)
ビード検査方法及びビード検査装置
【課題】検査対象の大きさに関わらず、非破壊でビードののど厚を算出可能なビード検査方法及びビード検査装置を提供する。
【解決手段】ビードBの品質を検査するビード検査工程S1及びビード検査装置1であって、ビード検査装置1は、ろう付けワイヤWの供給速度を計測するワイヤ供給速度計測装置11と、第一母材M1、第二母材M2、及びビードBの表面の位置座標データを計測し、解析する解析部12とを具備し、ろう付け前に第一形状データを計測する第一形状データ計測工程S10を行い、ろう付け後に第二形状データを計測する第二形状データ計測工程S30を行い、第一形状データ、第二形状データ、及びろう付けワイヤWの供給速度に基づいて、特徴量の予測値を算出する特徴量算出工程S40を行い、特徴量の実測値と、のど厚の実測値とに基づいて作成される回帰式によってのど厚の予測値を算出するのど厚算出工程S50を行う。
(もっと読む)
位置姿勢推定方法及びその装置
【課題】 標準的な形状の三次元形状モデルに比して、形状のばらつきを持つ物体であっても、当該物体の位置姿勢を高精度に推定する方法を提供する。
【解決手段】 物体の三次元標準形状を表す三次元モデルを構成する特徴のずれの統計量を推定し、特徴ごとに信頼度を決定する。撮像装置によって取得した観測データから抽出した特徴と三次元モデル中の特徴とのずれ量を算出する。三次元モデルから抽出した各特徴に関するずれ量と信頼度とに基づいて、物体の三次元位置姿勢を推定する。
(もっと読む)
端子圧着不良検出装置
【課題】 端子取付部の画像を撮影して端子圧着不良の検出を行うに当たって、画像の位置調整の処理を簡単化する。
【解決手段】 端子付き電線4を移動させたまま端子部の画像データをカメラ2で撮影し、取得した画像データについて、所定の枠内において、電線を横切る方向に、複数回平行に走査して各ライン毎に輝度の重心点を求め、各重心点に基づいて第1の座標軸を決定する。また、前記画像データ全体について、電線を横切る方向に、複数回平行に走査してライン毎に、隣接する画素間の輝度の差を積算して、積算値の変化パターンを生成し、該変化パターンを前記第1の座標軸方向に移動させながら、基準パターンと比較し、最も一致する位置に基づいて、前記第1の座標軸と直交する第2の座標軸を決定する。そして、両座標軸を基準として前記画像データの位置を調整し、端子圧着状態の良否判定を行う。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、及びプログラム
【課題】距離画像の欠損領域(無効領域)を特徴として利用した、対象物体の3次元位置姿勢の推定を可能にすることを目的とする。
【解決手段】3次元形状が既知である対象物体の3次元の位置姿勢を計測する位置姿勢計測装置であって、対象物体までの距離情報が画素値として保持された距離画像を撮像する撮像部と、距離画像から、撮像部と対象物体との距離情報が取得できない領域である無効領域を選別する選別部と、無効領域の特徴を示す特徴量を抽出する抽出部と、距離画像を撮像した時の撮像部と対象物体との相対的な位置姿勢を示す情報と、撮像部により複数の異なる方向から撮像された距離画像ごとの特徴量とを関連付けて記憶する記憶部と、抽出部により抽出された特徴量に対応する記憶部に記憶された特徴量を求めて、当該求められた特徴量と関連付けられた位置姿勢を示す情報から対象物体の3次元の概略位置姿勢を決定するする概略位置姿勢決定部と、を備える。
(もっと読む)
パターン化された構造を測定するための方法およびシステム
パターン化された構造の少なくとも1つのパラメータの測定で使用するための方法およびシステムが提供される。方法は:構造の異なる位置上の測定に対応する複数の測定された信号を含む測定されたデータと、理論的信号と測定された信号との間の関係は、構造の少なくとも1つのパラメータを示す理論的信号を示すデータとを含む入力データを提供する過程と;構造の少なくとも1つの性質を特徴付ける少なくとも1つの選択されたグローバルパラメータに基づきペナルティ関数を提供する過程と;フィッティングプロシージャの前記実行は、理論的信号と測定された信号との間の最適化された関係を決定するために前記ペナルティ関数を使用することと、構造の前記少なくとも1つのパラメータを決定するために最適化された関係を使用することとを含む、理論的信号と測定された信号との間のフィッティングプロシージャを実行する過程と;からなる。 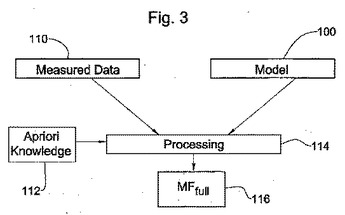 (もっと読む)
(もっと読む)
測定システム及び測定方法
【課題】測定対象の特性を簡易に測定可能な測定システムを提供する。
【解決手段】蛍光を発する蛍光体2と、蛍光体2から発せられた後に測定対象である膜100の特性に依存する変調を波長選択的に与えられた蛍光を受光する光学系10と、変調を与えられた蛍光の減衰特性を測定する減衰特性測定部301と、減衰特性に基づいて、測定対象である膜100の特性を特定する特定部302と、を備える測定システムを提供する。
(もっと読む)
物体形状評価装置
【課題】測定点群と基準点群との合同変換が適正に行われるとともに、基準点群と測定点群とのずれから欠陥を検出する際に型修正に起因する欠陥誤検出が低減される物体形状評価装置を提供する。
【解決手段】物体形状評価装置は、金型を用いて製作された測定対象物の測定点と基準点との間の距離を逐次収束させることで測定点と基準点とを位置合わせする位置合わせ処理手段50と、位置合わせ処理後の基準点と適正に対応せず互いに隣接する複数の測定点からなる誤対応測定点群を欠陥と判定する欠陥評価手段6とを備えている。欠陥評価手段6には、前回での欠陥位置を含む欠陥情報に基づいて当該欠陥を型修正箇所とみなす型修正評価部63と、これによって評価された型修正箇所に関する型修正箇所情報が型修正箇所情報格納部83に登録される。
(もっと読む)
141 - 160 / 463
[ Back to top ]