
Fターム[2F065QQ21]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 形状特定のためのパラメータ抽出 (463)
Fターム[2F065QQ21]に分類される特許
61 - 80 / 463
タイヤ形状検査装置、及びタイヤ形状検査方法
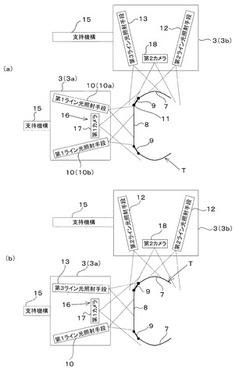
【課題】ショルダ部を含めてタイヤの表面形状を検出することができるようにする。
【解決手段】タイヤ形状検査装置は、タイヤのトレッド部8に対してライン光を照射する第1ライン光照射手段10と、タイヤのサイドウォール部7に対してライン光を照射する第2ライン光照射手段12と、タイヤのショルダ部9から当該ショルダ部9を超えた領域までライン光を照射する第3ライン光照射手段13と、第1ライン光照射手段10、第2照射手段及び第3ライン光照射手段13が照射してタイヤ表面で反射したライン光を撮像する撮像手段16とを備える。
(もっと読む)
マルチカメラのキャリブレーション用全周フィールド

【課題】マルチカメラをキャリブレーションする場合の被写体であって、カメラごとに被写体を移動させることなく、高精度なマルチカメラのキャリブレーションが可能な全周フィールドおよびその撮影方法を提供する。
【解決手段】全周フィールドは、基準方向に光軸を有する基準カメラ11と、基準方向とは異なる方向に光軸を有する他のカメラ12とを有するマルチカメラ10aで撮影し、キャリブレーションするための全周フィールド1であって、マルチカメラ10aの内部パラメータまたは外部パラメータを測定するために撮影される、全周フィールド1内に配置された、三次元座標が既知の複数のターゲットを備える。基準方向から所定の角度範囲においては、ターゲットが第1の密度で配置され、基準方向から所定の角度範囲の範囲外においては、ターゲットが第1の密度よりも高い第2の密度で配置される。また、全周フィールド1の法線は、少なくとも2方向を有する。
(もっと読む)
形状測定装置の校正方法、形状測定装置、校正用ターゲット
【課題】光断面式により形状を測定する形状測定装置の校正を、校正用ターゲットを頻繁に移動させることなく行うことのできる形状測定装置の校正方法、形状測定装置及び校正用ターゲットを提供する。
【解決手段】底面形状及び寸法が既知である柱体の校正用ターゲット20に、校正用ターゲット20の底面形状における複数の特徴点に対応し、該底面と平行に配置された複数の発光点を含む少なくとも3組の発光体群21〜23を、校正用ターゲット20の柱体高さ方向の位置が異なり、且つそれぞれの前記特徴点と該特徴点に対応する前記発光点各々とが同一直線上に位置するように並設し、発光体各々及びラインレーザの撮像画像と射影変換で複比が不変であることとに基づいて校正用ターゲット20の特徴点の位置座標を同定し、装置校正を行う。
(もっと読む)
グラスランの断面形状評価方法
【課題】グラスランにおける断面形状の各部の寸法の評価をインラインにて定量的に行える断面形状評価方法を提供する。
【解決手段】押出成形後に所定長さに裁断された断面略チャンネル状のグラスラン1の切断面をCCDカメラ28で撮像し、断面形状の良否を画像解析装置33により評価する。撮像する工程のほか、側壁部とリップのそれぞれの長さと側壁部に対するリップ先端までの距離を計測してその良否判定を行う工程と、底壁部の幅寸法を計測してその良否判定を行う工程と、各側壁部と底壁部との相対位置関係として底壁部と各側壁部とのなす角度を計測してその良否判定を行う工程と、を含んでいる。
(もっと読む)
ロボット装置、位置姿勢検出装置、位置姿勢検出プログラム、および位置姿勢検出方法
【課題】平面画像により表現された対象物体の、立体空間における位置および姿勢を高精度に検出する。
【解決手段】対象物体を撮像して画像データを生成する撮像装置11と、撮像装置11を可動に支持するロボット本体12と、リファレンスに対する撮像装置11からの視線方向ごとに、視線方向に対する面のテンプレート画像データとロボット座標系における面の位置および姿勢を表す情報とロボット座標系における撮像装置11の位置および姿勢を表す情報とを有するテンプレート情報を記憶するテンプレート情報記憶部と、撮像装置11が生成した画像データに含まれる対象物体の画像から可視である面を検出し、テンプレート情報記憶部から、可視である面に対応するテンプレート情報を読み込み、テンプレート情報に基づいてロボット座標系における対象物体の位置および姿勢を表す位置姿勢データを生成する位置姿勢データ生成部とを備えた。
(もっと読む)
半導体チップ搭載装置及び半導体チップ搭載方法
【課題】搭載対象のチップが良品であるか否かを判断しながら搭載処理が行えるようにする。
【解決手段】 複数のチップにダイシングされたウェハ5の周縁位置を複数撮影する撮影手段12,14と、撮影手段12,14により撮影されたウェハ5の周縁位置の画像データに基づき、ウェハ5の外縁をなすウェハ5円の中心位置及び直径を含むウェハ情報を算出するウェハ情報算出手段15と、予め設定されたチップサイズ及びウェハ情報に基づき、搭載するチップの中心位置及び当該チップにおける所定箇所のコーナ位置を含むチップ情報を算出するチップ情報算出手段15と、チップ情報に基づき、チップのコーナ位置がウェハ5円の内側に位置するか否かを判断し、ウェハ5円の内側に位置する場合には、当該チップは搭載可能な良品であると判断する良品判断手段15と、チップが良品と判断された場合に、当該チップの搭載を行う搭載実行手段と、を備える。
(もっと読む)
散乱計測定の改良システムおよび応用
【課題】回折構造体の測定パラメータモデルを利用する分光散乱システムおよび方法を提供する。
【解決手段】モデルの固有値を事前計算し、記憶し、ある共通の特性をもつ他の構造体に対して後に再利用する。1つ以上のパラメータの値を求めるために用いられる散乱データは、下敷フィルム特性に対して感度が低くなる波長におけるデータだけに制限することが可能である。代表的な構造体をスラブ200’(i)のスタックにスライスし、各スラブの近似を行うため四角形ブロック210,212,214,216,218のアレイを作成することによって三次元グレーティングに対するモデルを構築することが可能となる。
(もっと読む)
乗物用シート
【課題】乗物用シートの剛性を低下させることなく、着座した乗員の体格を検知可能な乗物用シートを提供する。
【解決手段】乗員が背中を凭せ掛けるシートバック部20と、乗員が腰を下ろすシートクッション部30とを備え、シートバック部20またはシートクッション部30の少なくとも一方は枠部22を有しており、枠部22に2重となるように取り付けられる伸縮性を有する網状の表皮23と、シートバック部20またはシートクッション部30に対して乗員の反対側に配置されているとともに乗員が着座することで表皮に浮き出た模様を撮像する撮像手段Ca、Cbと、撮像した模様に基づいて着座している乗員の体格を判定する処理手段Cuとを備えている。
(もっと読む)
段差エッジ推定装置
【課題】撮像手段により取得されるステレオ画像を利用して、階段等の段差部の平坦面部の先端部のエッジの位置及び方向を精度良く推定することを可能とする装置を提供する。
【解決手段】撮像手段3R,3Lにより撮像した2つの撮像画像(ステレオ画像)を用いて段差部(階段)50の段差エッジ52の位置及び方向を推定する。第1の撮像画像に設定した領域における画像の素値分布と、第2の撮像画像の対応領域における画像を平面パラメータに応じて射影変換してなる画像の画素値分布との間の誤差を表す誤差関数を線形結合して構成される評価関数を算出し、この評価関数の値を最小化するように、段差エッジの位置及び方向を表す段差エッジパラメータを探索的に特定する。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】3次元部品7を対象とする3次元画像形成において、走査光の計測対象面からの反射光の受光位置を検出する位置検出部を、受光面の計測対象面に対する傾斜角度が相異なる第1PSD25A、第2PSD25Bを有する構成とし、第1PSD25A、第2PSD25Bがそれぞれ受光した光量のうち大きい方の光量が所定の範囲を超えたとデータ処理部15aの受光量判定部によって判定されたならば、当該走査部位についての受光位置検出結果として小さい方の光量に基づく受光位置検出結果を採用して3次元認識画像を形成する。これにより、受光した光量が過大である場合に生じるノイズを排除することができ、安定した3次元認識画像を形成して正しい部品認識結果を得ることができる。
(もっと読む)
検査装置及び欠陥検査方法
【課題】炭化珪素基板又は炭化珪素基板に形成されたエピタキシャル層に存在する欠陥を検出し、検出された欠陥を分類する検査装置を実現する。
【解決手段】本発明では、微分干渉光学系を含む走査装置を用いて、炭化珪素基板の表面又はエピタキシャル層の表面を走査する。炭化珪素基板からの反射光はリニアイメージセンサ(23)により受光され、その出力信号は信号処理装置(11)に供給する。信号処理装置は、炭化珪素基板表面の微分干渉画像を形成する2次元画像生成手段(32)を有する。基板表面の微分干渉画像は欠陥検出手段(34)に供給されて欠陥が検出される。検出された欠陥の画像は、欠陥分類手段(36)に供給され、欠陥画像の形状及び輝度分布に基づいて欠陥が分類される。欠陥分類手段は、特有の形状を有する欠陥像を識別する第1の分類手段(50)と、点状の低輝度欠陥像や明暗輝度の欠陥像を識別する第2の分類手段(51)とを有する。
(もっと読む)
画像検査装置、画像検査方法、及びコンピュータプログラム
【課題】検査対象領域を撮像して取得した多値画像の明暗が変化した場合であっても、非検出対象物であるノイズを効果的に除去し、検出対象物であるブロブ(集合体)状の傷、汚れ等の欠陥の有無、大きさ、形状等を検査する画像検査装置、画像検査方法、及びコンピュータプログラムを提供する。
【解決手段】検査対象領域の多値画像を取得し、取得した多値画像の濃度情報に基づいて基準濃度値を算出する。多値画像の各画素の濃度値と算出した基準濃度値との差分を画素ごとに算出し、基準濃度値の変化に追従して変化するように基準濃度値に対して相対的に閾値を設定して記憶する。算出した差分が閾値より大きい複数の画素を抽出し、抽出された複数の画素の輝度値の連結性に基づいて画素の集合体を特定し、特定された画素の集合体に対して、差分を用いた特徴量を算出する。算出した特徴量に基づいて、特定された画素の集合体の欠陥を判別する。
(もっと読む)
検査装置および方法、リソグラフィ装置、リソグラフィ処理セル、およびデバイス製造方法
【課題】オーバーレイ測定、非対称性測定、およびインダイオーバーレイターゲットの再構築を可能にする。
【解決手段】四分くさび光デバイス(QW)は、基板から散乱した放射の回折次数を別々に再誘導し、第1方向および第2方向の各々に沿って照明から回折次数を分離する。例えば、0次(0、0’)および1次(−1、+1’)を、各入射方向について分離する。マルチモードファイバ(MF)での捕捉の後、スペクトロメータ(S1−S4)を使用して波長(I0’(λ)、I0(λ)、I+1’(λ)、およびI−1(λ))の関数としての空間的に再誘導された回折次数の強度を測定する。そして、これをオーバーレイエラーの計算、または単一格子の非対称パラメータの再構築に用いる。
(もっと読む)
表面形状計測装置、及び表面形状計測方法
【課題】計測対象物の三次元形状を容易に、且つリアルタイムに得ることができる表面形状計測装置、及び表面形状計測方法を提供する。
【解決手段】道路8の表面にレーザビーム9を走査させて、道路8の表面に照射したレーザビーム9の方位毎の測距データを出力する測域センサ1と、レーザビーム9の投光面の一部を含んだ道路8の表面を撮像するカメラ3と、測域センサ1、及びカメラ3を道路8の表面に沿って車輪7を回転させて移動させる走行台車5と、走行台車5により測域センサ1、及びカメラ3を移動させた時に測域センサ1から得られた測距データを演算処理してz軸方向の位置座標を求め、カメラ3から得られた画像データを演算処理してx軸方向、並びにy軸方向の位置座標を求める位置座標検出手段と、位置座標検出手段により求められた各軸方向の位置座標に基づいて道路8の三次元形状を演算するPC4と、を備えて構成されている。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】単純な形状に限らず認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づいて、認識対象物または3次元モデルを対称的に配置した2つの姿勢候補を示す姿勢候補情報を生成する姿勢候補情報生成部234と、認識対象物の姿勢候補情報と3次元モデル情報とに基づいて、または、認識対象情報と3次元モデルの姿勢候補情報とに基づいて認識対象物の位置および姿勢を特定する認識対象物特定部236とを備える。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】コネクタ等の固定部にケーブル等の可変部を加えた3次元モデルを通じて認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、固定部と内部自由度を有する可変部とを含み長手軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づき、長手軸に対して対称な2つの候補姿勢をつくり、認識対象物と、可変部の内部自由度を変化させた3次元モデルとをパターンマッチングして認識対象物の位置および姿勢を特定する認識対象物特定部234とを備える。
(もっと読む)
金属缶端巻締め外観検査方法、金属缶の外観検査方法、金属缶端巻締め外観検査装置、および容器の口部検査装置
【課題】缶の巻締め部の巻締め厚さを全周にわたって精度よく計測できる金属缶端巻締め外観検査方法を提供する。
【解決手段】外観検査装置を用いた金属缶端巻締め外観検査方法は、巻締め部上方に配設したリング照明装置2からの照明光により巻締め上端両側の反射映像をリング照明装置2の中心と同軸上に配設したカメラ4で撮像し、入力映像をディジタル多階調画像に変換し、巻締め上端両側の二重のリング状画像を得、リング状画像の中心から放射状に二重のリング外側端とリング内側端とのリング幅を適宜な間隔で全周計測し、各リング幅寸法があらかじめ設定した上下限の閾値範囲外のとき、金属缶が不良品であると判別する。
(もっと読む)
錠剤の外観検査装置及びPTP包装機
【課題】 錠剤の振動やポケット内の姿勢に影響を受けることなく正確な検査が行えるようにすること
【解決手段】 3Dカメラ装置は、容器フィルムのポケット部内に供給された錠剤を撮像し、三次元計測法により錠剤の表面の各位置の高さ位置を濃淡画像で表したプロファイル画像を求め、処理装置22に送る。処理装置は、プロファイル画像に基づき錠剤の外観検査を行うもので、プロファイル画像中の錠剤を示す画像データを抽出する錠剤検出部31と、抽出した画像データをその錠剤の表面が平坦になるように補正処理をして平坦化画像を生成する平坦化処理部32と、その平坦化画像に基づいて外観異常の判定を行う欠陥解析部34を備える。平坦化処理部32により錠剤の表面の高さ位置が平坦(水平)に正規化されるので、簡単な閾値処理で異常の有無を判定できる。
(もっと読む)
ロール状衛生用紙の寸法測定装置
【課題】高速で搬送されるロール状衛生用紙の姿勢をその搬送途中で確実に変更し、その幅寸法を正確に測定することが困難である。
【解決手段】本発明によるロール状衛生用紙12の寸法測定装置10は、水平な軸線回りに所定速度で回転し、円筒状をなすロール状衛生用紙12の幅方向一端面12Fを受ける底壁16aとこの底壁16aを囲む周壁16b,16cとをそれぞれ有してロール状衛生用紙12を収容し得る複数のバケット16が放射状に設けられ、ロール状衛生用紙12が投入される投入位置PIと、その幅寸法が測定される測定位置PSと、測定終了後のロール状衛生用紙12が放出される放出位置POとがその回転方向に沿って設定されたローター11と、底壁16aが上向きとなる測定位置PSにあるバケット16に収容されたロール状衛生用紙12の幅方向他端面12Rの位置を検出するためのセンサー13とを具る。
(もっと読む)
3次元寸法測定装置
【課題】本発明の目的は、画像を用いた測定において、1枚の画像に納まりきらない程の高い倍率で画像を取得する際にも、容易な操作で画像を取得でき、かつ、寸法を算出する際に、1枚の画像に納まりきらない程の高い倍率で撮影した画像を用いることで、1枚の画像に納まりきる画像から寸法を算出するよりも高い精度で寸法を算出可能な装置を提供することにある。
【解決手段】本発明は、ワイドカメラの画像からワークの輪郭を抽出し、抽出された輪郭情報に基づき、駆動機構の走査軌跡および、複数のカメラの撮像倍率を決定し、決定された走査軌跡を走査中に、複数のカメラから複数枚の画像を取得し、複数枚の画像を合成して、高倍率の画像を生成し、生成された高倍率画像から高精度に輪郭の寸法を求めることを特徴とする。
(もっと読む)
61 - 80 / 463
[ Back to top ]