
Fターム[2F065QQ21]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 形状特定のためのパラメータ抽出 (463)
Fターム[2F065QQ21]に分類される特許
41 - 60 / 463
錠剤検査装置及びPTP包装機
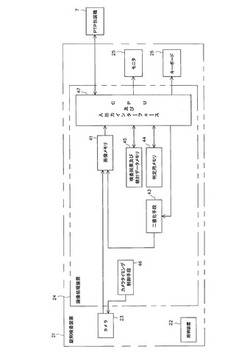
【課題】錠剤の変更にも柔軟かつ円滑に対応することができ、しかも検査精度の飛躍的な向上を図ることのできる錠剤検査装置及びPTP包装機を提供する。
【解決手段】錠剤検査装置21は、容器フィルムのポケット部に収容された錠剤に対し光を照射可能な照明装置22と、照明された範囲内の錠剤を撮像可能なカメラ23と、カメラ23から出力される画像信号を処理する画像処理装置24とを備える。画像処理装置24は、画像データに基づき錠剤の輪郭を抽出し、輪郭上における第1の所定点及び第2の所定点の接線の向き情報を演算するとともに、第1及び第2の所定点で挟まれた第3の所定点の接線の向き情報を求め、第3の所定点の接線の向き情報が、第1の所定点の接線の向き情報及び第2の所定点の接線の向き情報に基づく許容範囲を逸脱している場合に、当該第3の所定点に関し不良候補として判定する。
(もっと読む)
形状計測装置

【課題】太陽電池ウェハの表面及び裏面の形状のみならず、太陽電池ウェハの厚みを高速に算出する。
【解決手段】光源121,131は太陽電池ウェハの表面及び裏面に光切断線CLを照射する。カメラ122,132は太陽電池ウェハが所定距離搬送される都度、測定試料500の表面及び裏面の光切断線画像を連続撮像する。計測データ算出部123,133は角光切断線画像から光切断線CLが現れている重心座標を表面計測データ及び裏面計測データとして算出する。高さデータ算出部143は、表面計測データ及び裏面計測データから太陽電池ウェハの表面及び裏面の高さデータを算出する。厚みデータ算出部146は、太陽電池ウェハの表面及び裏面の高さデータから太陽電池ウェハの厚みデータを求める。
(もっと読む)
ラインセンサカメラのキャリブレーション装置およびキャリブレーション方法
【課題】カメラパラメータを用いることなく簡単に高精度の「pixel→高さ」換算式を求めることを可能とする。
【解決手段】長方形状に形成されその表面に白色領域1wと黒色領域1bとを交互に配されてなるキャリブレーション用機材1と、キャリブレーション用機材1の長手方向を撮影するように配設されたラインセンサカメラ2と、ラインセンサカメラ2から出力される画像信号に基づいてラインセンサカメラ2のキャリブレーションを行う処理用コンピュータ3とを備え、白色領域1wと黒色領域1bの幅がそれぞれ同一幅であるとともに白色領域1wと黒色領域1bとの境界線がキャリブレーション用機材1本体の長手方向に対して所定の角度θだけ傾斜するように構成した。
(もっと読む)
欠陥観察方法及びその装置
【課題】検査装置の検査情報とレビュー装置で取得した観察情報とを用い、欠陥の高さ、屈折率、材質の情報を取得して欠陥材質・屈折率分析や、微細なパターン形状の三次元解析を行う方法、並びにこれを搭載した欠陥観察装置を提供する。
【解決手段】試料上の欠陥を観察する方法において、光が照射された試料からの反射・散乱光を受光した検出器からの検出信号を処理して検出した検査結果の情報を用いて観察対象の欠陥が存在する位置を走査電子顕微鏡で撮像して画像を取得し、この取得した観察対象の欠陥の像を用いて欠陥のモデルを作成し、作成された欠陥のモデルに対して光を照射したときに欠陥モデルから発生する反射・散乱光を検出器で受光した場合のこの検出器の検出値を算出し、この算出した検出値と実際に試料からの反射・散乱光を受光した検出器の検出値とを比較して観察対象の欠陥の高さ又は材質又は屈折率に関する情報を求めるようにした。
(もっと読む)
金属缶端部の巻締検査装置及び検査方法
【課題】簡単な構成にて巻締め検査を精度よく行える金属缶端部の巻締検査装置及び検査方法を提供する。
【解決手段】カメラ32からの取得画像から極座標展開画像112を形成し(S4)、巻締め部3内側側面61の内側フランジエッジ122と(S5)、外側側面62の外側フランジエッジ124を認識して(S6)、内側フランジエッジ122から外側フランジエッジ124までの幅寸法131が閾値内にあるか否かを判断する(S8)。閾値内の場合、内側側面61の内帯幅161の長さ方向での変化量、及び外側側面62の外帯幅162の長さ方向での変化量を検査し(S9)、これらの変化が大きい場合、巻締不良フラグをセットして(S10)終了する一方、変化が小さい場合には、巻締不良フラグをリセットして(S11)終了する。
(もっと読む)
検査方法および検査装置
【課題】マスクの歪の影響によらずパターンの良否を正確に判定することのできる検査装置および検査方法を提供する。
【解決手段】マスク上の任意の少なくとも4点の座標を測定する(S101)。次いで、これらの少なくとも4点について、それぞれ対応する設計データの各座標との差を求め、最も差の大きい1点を選択する(S102)。次に、選択した1点と設計データの座標との差が予め設定した閾値を超えるか否かを判定する(S103)。閾値以下であれば、少なくとも4点全てを用いて、光学画像と参照画像との位置合わせを行う(S104)。一方、閾値を超える場合には、この点を除外し、残りの少なくとも3点を用いて位置合わせを行う(S105)。
(もっと読む)
車両周辺監視装置
【課題】車両周辺監視装置において、実寸と相関性の高いテンプレートサイズを設定することができ、その結果、良好な画像処理結果を得ることができ、また、不必要に大きいテンプレートサイズを設定することがないため、計算量の増加を防ぐことにある。
【解決手段】制御手段(4)は、各実空間座標位置に予め設定された3次元寸法の仮想ブロックを想定し、この仮想ブロックが画像上に表示されるサイズを記憶する記憶手段(6)と、この記憶手段(6)に記憶された表示サイズから一つの画素の周辺画素を一群のデータとして画像処理を行うためのテンプレートサイズを設定するテンプレートサイズ設定手段(7)と、このテンプレートサイズ設定手段(7)により設定されたテンプレートサイズを用いて撮像手段(3)により撮像された画像を処理する画像処理手段(8)とを備える。
(もっと読む)
形状認識方法、形状認識装置及び実装基板生産装置
【課題】物体が高速で移動し、物体の大きさによって必要とされる分解能が異なる場合でも、当該物体の形状認識を精度良く行うことができる形状認識方法を提供する。
【解決手段】物体の形状認識方法であって、基準光を物体上の投影領域に投影する基準光投影ステップ(S102)と、基準光が投影された投影領域のうちライン状の領域を撮像する基準光撮像ステップ(S104)と、輝度の傾斜方向に輝度が異なる輝度傾斜量を有する光である輝度傾斜光を投影領域に投影する傾斜光投影ステップ(S106)と、輝度傾斜光の投影方向と異なる撮像方向で、輝度傾斜光が投影された投影領域のうち、輝度傾斜光の輝度の傾斜方向と異なる方向に延びて配置されるライン状の領域を撮像する傾斜光撮像ステップ(S108)と、基準光撮像ステップ(S104)と傾斜光撮像ステップ(S108)での撮像結果を用いて物体の形状を認識する形状認識ステップ(S110)とを含む。
(もっと読む)
マシンビジョンシステムにおける潜在的な干渉要素の検査
【課題】マシンビジョンシステムにおける潜在的な干渉要素の検査を提供する。
【解決手段】マシンビジョン検査システムにおいて使用するためのロバストなビデオツールが提供される。ロバストなビデオツールには、関心領域と、ユーザインターフェースと、エッジ検出動作と、関心領域において検出されたエッジ点を含むと同時に除外領域におけるエッジ点を除外する現在の要素のエッジ点セットを決定する除外領域動作と、が含まれる。除外領域は、少なくとも1つの予め特徴付けられた要素、すなわち、予め特徴付けられた要素のエッジ点を検出し、かつ予め特徴付けられた要素の寸法パラメータを特徴付けるビデオツールを用いることによって特徴付けられる要素である少なくとも1つの予め要素付けられた要素に基づいて、除外領域ジェネレータによって決定される。
(もっと読む)
情報処理プログラム、情報処理方法、情報処理装置および情報処理システム
【課題】マーカを精度良く認識する点について改善された情報処理プログラム等の提供。
【解決手段】情報処理装置のコンピュータを、画像を逐次取得する画像取得手段、取得された画像から特定対象を検出する特定対象検出手段、検出された特定対象の中央領域から得られた画素値に基づいて、当該中央領域に関連する第1領域情報を検出する第1領域情報検出手段、その検出結果が所定の条件を満たすか否かを判定する第1判定手段、特定対象のうち中央領域の周辺に存在する周辺領域から得られた画素値に基づいて、当該周辺領域に関連する第2領域情報を検出する第2領域情報検出手段、および少なくとも、第1判定手段による判定結果が肯定である場合に第2領域情報検出手段により検出された第2領域情報を出力する出力手段として機能させるための情報処理プログラム。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】精度良く三次元モデルを作成する。
【解決手段】画像受付部11は、被写体を異なる角度から複数回撮像することにより得られる複数の画像の組の入力を受け付ける。三次元モデル生成部12は、受け付けられた複数の画像の組のそれぞれに基づいて、被写体の三次元モデルを複数生成する。三次元モデル選択部13は、被合成三次元モデルと合成三次元モデルとを選択する。特徴点抽出部14は、被合成三次元モデルと合成三次元モデルから、複数の第1特徴点と第2特徴点を抽出する。特徴点選択部15は、抽出された複数の第1特徴点と第2特徴点の中から、ステレオカメラ1との距離が近い特徴点を優先的に選択する。座標変換パラメータ取得部16は、座標変換パラメータを取得する。座標変換部17は、合成三次元モデルの座標を被合成三次元モデルの座標系の座標に変換する。三次元モデル合成部18は、合成三次元モデルを被合成三次元モデルに合成する。
(もっと読む)
視線方向の推定装置、視線方向の推定方法およびコンピュータに当該視線方向の推定方法を実行させるためのプログラム
【課題】顔の向きの制限を緩和して、比較的少数のカメラにより、観測範囲内の任意の位置における被測定対象者の視線方向のリアルタイムに推定し追跡する視線方向の推定装置を提供する。
【解決手段】第2の頭部位置・姿勢推定部5612は、撮影できている複数のカメラからの画像データを統合して処理することにより、頭部の位置および頭部の姿勢の推定処理を実行する。処理対象となっている画像フレーム以前に獲得されている眼球の3次元モデルに基づいて、眼球中心推定部5614は、処理対象の特定人物の眼球中心の3次元的な位置を推定する。虹彩中心抽出部5616は、虹彩の中心の投影位置を検出する。視線方向推定部5618は、抽出された虹彩の中心の投影位置である画像フレーム中の2次元的な位置と、推定された眼球の3次元的な中心位置とに基づいて、視線方向を推定する。
(もっと読む)
レジストの光学特性を変化させる方法及び装置
【課題】集積回路のような電子素子の製造において、光計測を用いた測定の精度を改善する方法及びシステムを提供する。また、調節可能なレジストの光学特性を変化させる方法及びシステムを提供する。
【解決手段】その調節可能なレジスト層は反応性ガス、液体、プラズマ、放射線若しくは熱エネルギー又はこれらを結合させたものを用いて処理されて良い。それによってフォトレジストは露光前に第1組の光学特性と異なる第2組の光学特性を得て、露光波長で又はその近傍の放射線に対して透明ではなくなり、OTSM構造420が光線425、426及び427を反射する。
(もっと読む)
鋳物穴加工品の鏡面球体残留検査装置および方法
【課題】検査員の主観に依らずして客観的な基準により鏡面球体のショット玉を検出し、安定した検査精度を実現でき、検査の自動化によりインラインで全数検査を実施できる鋳物穴加工品の鏡面球体残留検査装置および方法を提供する。
【解決手段】鋳物穴加工品11の加工穴12の内部を照らす照明部と、加工穴内を撮像可能なCCDカメラ21と、ボアスコープ22を撮像対象加工穴12に挿入するXYステージ30と、CCDカメラ21で撮像した画像を画像処理する画像処理装置52を備え、画像処理装置52は、撮像した取得画像において、ハイライト領域を有し、かつハイライト領域を囲む周辺部位にハイライト領域よりも輝度値の低い環状の暗領域を有する画像領域を、鏡面球体像の候補領域として選択し、候補領域におけるハイライト領域の輝度値が上位閾値より高く、かつ暗領域の輝度値が下位閾値より低い場合に候補領域が真の鏡面球体像であると判断する。
(もっと読む)
3Dパターンマッチング方法
【課題】 レーザ計測等によって得られた3次元の点群データから対象物を精度よく検出する。
【解決手段】 レーザ計測によって得られた3次元の点群データに対して、ノイズを除去するためのリサンプリング処理を施す。そして、予め用意されたテンプレートとのマッチングを行う。テンプレートマッチングでは、まず、点群データおよびテンプレートを、共に所定サイズの格子に区切り、各格子内に存在するデータ点数をその格子の特徴量とする。こうして定義された特徴量に基づいて、点群データとテンプレートとを照合することによって、両者の位置関係、一致/不一致を比較的容易に判定することができる。テンプレートマッチングによって対象物が検出された後は、ICPマッチングによって、テンプレートと点群データとの位置関係をより精密に合致させ、対象物の検出を行う。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
ノズル外観検査装置、およびノズル外観検査方法
【課題】ノズル穴に生じる欠陥の種類を特定可能なノズル外観検査装置、およびノズル外観検査方法を提供すること。
【解決手段】ノズル外観検査装置100は、ノズル穴の開口部の画像を取得する画像入力手段60と、画像の二値化画像を生成する二値化手段61と、二値化画像からノズル穴の内輪郭および外輪郭を検出する輪郭検出手段62と、内輪郭の近似円である内輪郭近似円および外輪郭の近似円である外輪郭近似円を算出する近似円算出手段63と、内輪郭および外輪郭と内輪郭近似円および前記外輪郭近似円とを比較して、内輪郭および外輪郭の形状の特徴を示す特徴フラグを内輪郭および外輪郭上の各点に対して設定するフラグ設定手段64と、特徴フラグに基づいて欠陥の種類を示す欠陥フラグを設定し、欠陥の種類とその位置を検出する欠陥検出手段65と、を具備する。
(もっと読む)
タイヤ形状検査装置、及びタイヤ形状検査方法
【課題】ショルダ部を含めてタイヤの表面形状を検出することができるようにする。
【解決手段】タイヤ形状検査装置は、タイヤのトレッド部8に対してライン光を照射する第1ライン光照射手段10と、タイヤのサイドウォール部7に対してライン光を照射する第2ライン光照射手段12と、タイヤのショルダ部9から当該ショルダ部9を超えた領域までライン光を照射する第3ライン光照射手段13と、第1ライン光照射手段10、第2照射手段及び第3ライン光照射手段13が照射してタイヤ表面で反射したライン光を撮像する撮像手段16とを備える。
(もっと読む)
3次元計測方法
【課題】平面精度が低い基板上に生成された、直径数十ミクロン程度のサイズのバンプの3次元計測を可能とする。
【解決手段】測定対象に固有の傾斜角で固有の色相光を投光し、固有の傾斜角で傾斜した視軸のカラーラインセンサカメラで撮像し、得られた画像画素の色相光反射強度基準化比率から、測定対象の表面パッチ傾斜角を算出し、表面パッチ傾斜角から表面パッチの高さを算出する3次元計測法において、まず光拡散表面を有する球状モデルを対象として、色相光反射強度基準化比率と表面傾斜角の対応表を作成し、未知の測定対象を撮像した画像画素の色相光反射強度基準化比率から表面パッチの傾斜角を算出し、傾斜角から表面パッチの高さを算出し、これをスキャン方向に沿って加算して縦断面高さデータを算出し、縦断面高さデータを対象横幅に亘って集積して、未知の測定対象の3次元計測を行う。
(もっと読む)
情報処理方法、眼窩下点の位置推定方法、フランクフルト平面の算出方法および情報処理装置
【課題】被測定者の負担が少なく、かつ簡便な方法によって、眼窩下点などの解剖学的特徴点の位置を推定する方法および装置を提供する。
【解決手段】人(被測定者)の頭部の皮膚表面より、目頭点ENT、目尻点ECT、目頭点ENTの側の眼裂と眉との間の凹部にあたる瞼点PLP、および耳珠上縁点の座標をそれぞれ取得する。取得された目頭点ENT、目尻点ECTおよび瞼点PLPを通る仮想球面SPHの最下点の座標を算出することで眼窩下点ORBの位置を推定する。そして、一または二の眼裂に関する眼窩下点ORBおよび一または二の耳珠上縁点を含む少なくとも3点の座標に基づいてフランクフルト平面を算出する。
(もっと読む)
41 - 60 / 463
[ Back to top ]