
Fターム[2F065QQ21]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 形状特定のためのパラメータ抽出 (463)
Fターム[2F065QQ21]に分類される特許
81 - 100 / 463
接触面積測定装置および接触面積測定方法
【課題】新規な接触面積測定装置を提供することを目的とする。
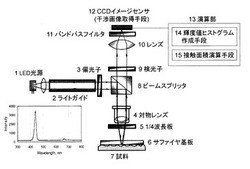
【解決手段】接触面積測定装置は、試料7に接する光透過性基板6と、前記試料7とは反対側から、前記光透過性基板6に光を照射する照射手段と、前記試料7からの反射光と前記光透過性基板6からの反射光とから生じる干渉画像を取得する干渉画像取得手段12と、前記干渉画像の輝度値情報を補正処理し、得られた補正輝度値情報から輝度値ヒストグラムを作成する輝度値ヒストグラム作成手段14と、前記輝度値ヒストグラムから接触面積を算出する接触面積演算手段15を有し、前記補正処理は、割り算演算を有する式により、補正画像輝度を算出する。ここで、補正画像輝度は、式(補正画像輝度=(対象画像輝度/参照画像輝度)×定数)により算出することが好ましい。また、参照画像輝度は、荷重ゼロ時の元画像に対し、ガウスぼかしフイルター処理して求めることが好ましい。
(もっと読む)
三次元形状測定装置

【課題】被検物の一部に単位距離あたりの形状変化が大きい部分があっても、データ取得時間を短くする。
【解決手段】検査光を被検物に照射する照射部21と、検査光と被検物とを相対移動させる移動部と、検査光が照射された被検物を撮像し、撮像結果を出力する撮像部22と、撮像部22の撮像結果に基づいて、前記被検物の三次元形状を前記相対移動の方向に間隔をおいて演算する座標算出部53と、被検物の形状に応じて前記間隔を変更する制御部41と、を備える。
(もっと読む)
計測装置
【課題】簡単な構成で、試料を加熱しつつ正確に計測することが可能な計測装置を提供する。
【解決手段】計測装置は、試料Aを保持する位置または試料Aに対向する位置に配置され、透明基板121と透明基板121の表面に設けられた透明導電膜122を有する透明部材12と、試料Aを撮影する光検出部22と、透明部材12の透明導電膜122に印加する電圧を制御することにより、透明部材12の温度を制御する熱制御部42とを備える。
(もっと読む)
三次元計測治具及びこれを用いた三次元計測方法
【課題】棒状ワークの曲がり角度を簡単に計測することができるのに加えて、棒状ワークの計測部位毎の曲がり角度を記録に残すことが可能になる三次元計測治具及びこれを用いた三次元計測方法を提供する。
【解決手段】筒体や柱体等の棒状ワークの曲がり角度を計測するのに用いられる三次元計測治具であって、互いに合体してパイプWの外周に嵌合装着される一対の半円形治具構成体2,2を備え、一対の半円形治具構成体2,2には、レーザ光Lrの送受信を行うことで中心Rpの三次元座標が求められる球状のリフレクタRをスライド可能に保持する外向き溝2bが形成され、リフレクタRを保持する外向き溝2bは、パイプWの治具構成体2,2が装着される部位における断面を算出するのに必要な複数の位置を結んでパイプWの外周に沿ってそれぞれ形成されている。
(もっと読む)
テクスチャ評価装置、テクスチャ評価方法
【課題】対象物の表面において多数の凹凸が繰り返し形成された領域全体についての評価が可能なテクスチャ評価装置、テクスチャ評価方法を提供する。
【解決手段】テクスチャ評価装置1は、3次元計測部2と、3次元計測部2から計測データを入力する入力部3と、距離画像の生成などを行う演算部4と、評価結果を表示する表示部6とを備えている。3次元計測部2は、対象物10表面までの距離を計測し、計測した距離値を計測データとして入力部3に出力する。演算部4は、3次元計測部2から入力部3に入力された距離値を用いて、距離値を画素値とする距離画像を生成する距離画像生成部41を有している。さらに、演算部4は、距離画像の全体についてのテクスチャの凹凸の形状を表す測度の分布を求め、当該分布の統計量を特徴量として算出する特徴量算出部42と、算出された特徴量に基づいてテクスチャの評価を行う評価部43とを有している。
(もっと読む)
ステレオカメラの校正装置および校正方法
【課題】ステレオカメラの校正装置および校正方法を提供すること。
【解決手段】ステレオカメラの校正装置300は、第1カメラ320と、第2カメラ318と、カメラステー140とを含んでおり、コリメータユニット302がステレオカメラから距離を隔てて配置されたテストチャート306が無限遠位置に配置されたと等価な光路を形成させている。視差算出部362は、ステレオカメラが撮影した左右画像からテストチャート306とステレオカメラとの間の異なる光学的距離に相当する視差データを計算し、パラメータ算出部364が、視差算出部362が計算した視差データおよびテストチャートまでの実距離データを使用してステレオカメラの測距パラメータである視差オフセットbおよび距離換算パラメータaを算出している。
(もっと読む)
位置特定装置、位置特定方法、及びプログラム
【課題】基準位置からのベースライン長を十分に確保できない位置での撮像画像を用いて行うステレオ視による対象物の位置特定の精度を向上させる。
【解決手段】撮像位置特定部1は、位置情報が既知である基準位置の当該位置情報と、当該基準位置で対象物を撮像して得た基準位置画像と、任意の撮像位置で当該対象物を撮像して得た撮像位置画像とに基づいて、当該撮像位置の位置情報の特定を行う。対象物位置特定部2は、既知位置の位置情報と、当該既知位置で当該対象物を撮像して得た既知位置画像と、当該撮像位置の位置情報と、当該撮像位置で該対象物を撮像して得た撮像位置画像とに基づいて、当該対象物の位置情報の特定を行う。なお、既知位置とは、撮像位置特定部1で位置情報が特定された撮像位置からの距離が前述の基準位置よりも大きい地点に位置しており、且つ、位置情報が既知である位置のことである。
(もっと読む)
対象物検出装置及び方法
【課題】広い監視領域における大きさが異なる複数の対象物の位置や速度を推定できるようにすること。
【解決手段】本実施形態に係る対象物検出装置は、複数台のカメラにより道路上に存在する対象物を撮影した基準画像上で分割した短冊状領域の各点に関して、他のカメラで撮影された参照画像上で対応する点を算出する対応点算出部4と、各短冊状領域内の各点と、求められた参照画像の対応点との間の画像特徴量の一致度を算出する画像一致度算出部5と、短冊状領域の高さと対象物の接地位置とを変数として画像特徴量の一致度を最大にする接地位置関数を生成する接地位置算出部6と、接地位置関数における短冊状領域の高さに基づいて対象物の高さを算出する対象物高さ算出部7とを備える。
(もっと読む)
3次元形状認識装置及び方法
【課題】画像処理の処理効率の向上と共に相対的位置角度スケールを確実に検出できる3次元形状認識装置を実現することが求められる。
【解決手段】本実施形態によれば、3次元形状認識装置は、入力部と、幾何学的要素抽出部と、幾何学的要素対応付け処理部と、位置角度推定処理部とを備えた構成である。入力部は、同一の3次元形状の認識対象に対する複数の形状データを入力する。幾何学的要素抽出部は、前記各形状データのそれぞれから幾何学的要素を抽出する。幾何学的要素対応付け処理部は、角度または距離の比を含む相似不変量をキーとするハッシュテーブルを使用し、前記各幾何学的要素間で位置関係が合致する組み合わせを選出する。位置角度推定処理部は、前記選出される複数の組み合わせに基づいて前記各形状データ間で前記認識対象の相対的位置角度スケールを示す相対的位置角度情報を算出する。
(もっと読む)
検査方法
【課題】 本発明は検査方法に関し、より詳細には基板の検査方法を提供する。
【解決手段】 基板を検査するために、先に基板上に測定領域を設定し、測定領域に対する基準データ及び測定データを取得する。 続いて、測定領域に対して変換条件を設定し、基準データと測定データとの間の歪曲量に従う変換関係を取得する。次に、比較用特徴客体が変換関係を充足するか、比較用特徴客体を除いた特徴客体から選択された検証用特徴客体が変換関係を充足するか及び基板上に形成された検査対象パッドが変換関係を充足するかを検証する検証方法うち少なくとも一つの方法を用いて変換関係の有効性を検証する。続いて、変換関係が有効であると判断された場合変換条件を確定し、確定された変換条件に従って検査領域を設定する。これにより、歪曲を補償した正確な検査領域を設定することができる。
(もっと読む)
検査方法
【課題】本発明は検査方法に関し、より詳細には基板の検査方法を提供する。
【解決手段】基板を検査するために、まず、基板上に測定領域を設定し、続いて、測定領域に対する基準データ及び測定データを取得する。次に、測定領域内の所定の形状を含むようにブロック単位の複数の特徴ブロックを設定し、特徴ブロックのうちオーバーラップされる特徴ブロックをマージして統合ブロックを設定する。続いて、統合ブロック以外の特徴ブロック及び/または統合ブロックに対応する基準データと測定データとを比較して歪曲量を取得し、歪曲量を補償してターゲット測定領域内の検査領域を設定する。これにより、歪曲を補償した正確な検査領域を設定することができる
(もっと読む)
表面形状測定方法及び測定装置
【課題】正確性が向上した表面形状測定方法および測定装置を提供する。
【解決手段】このような表面形状測定方法は、少なくとも二以上の方向でパターン光を測定対象物に照射し、測定対象物から反射されたパターンイメージを取得する段階と、前記パターンイメージを用いて前記方向における高さを取得する段階と、前記方向における前記高さの増加率を表すベクトル場を取得する段階と、前記方向における前記高さに対する信頼指数を取得する段階と、前記信頼指数及び前記ベクトル場を用いて、統合ベクトル場を取得する段階及び前記統合ベクトル場を用いて測定対象物の各座標値に対する高さを測定する段階を含む。
(もっと読む)
3次元情報取得装置および3次元情報取得プログラム
【課題】対象と初期状態が異なる場合、この対象と初期状態との違いに基づく最適化処理の解の誤差を軽減すること。
【解決手段】位置姿勢逐次計測手段の初回起動時において最初に求めた初期フレームに対応する前記特徴点座標と前記カメラポーズ情報に対して、前記3次元座標および前記カメラポーズ情報の信頼度に応じて予め決められている加重値に基づく補正を行い、前記3次元座標の最適化を行う最適化処理手段を備えることを特徴とする。
(もっと読む)
画像生成装置、画像生成方法、およびプログラム
【課題】把持機構等の不要部分のない対象物のみの姿勢別画像を簡便な画像処理で得る。
【解決手段】対象物の画像を生成する画像生成装置であって、対象物を把持する把持部と、対象物と把持部との少なくとも1つの画像を撮像する撮像部と、把持部により把持された対象物が、撮像部に対して複数の所定姿勢のうちの1つの所定姿勢となるように把持部を制御する制御部と、撮像部により撮像された1つの所定姿勢にある対象物および対象物が1つの所定姿勢となるように制御された把持部の画像と、1つの所定姿勢とを関連付けて、把持状態画像として取得する第1の画像取得部と、対象物を把持しておらず且つ対象物が1つの所定姿勢となるように制御された姿勢と一致する所定姿勢である把持部の画像を非把持状態画像として取得する第2の画像取得部と、把持状態画像と、非把持状態画像との差分に基づいて、1つの所定姿勢について対象物のみの対象物画像を生成する画像生成部と、を備える。
(もっと読む)
カメラポーズ情報算出装置およびカメラポーズ情報算出プログラム
【課題】GPS装置や地磁気センサ等の検出装置を用いずに、カメラの位置や姿勢を示すカメラポーズ情報を算出すること。
【解決手段】メディア媒体に対応する画像領域である位置情報埋込領域をカメラ画像データから抽出し、電子透かしにおいて電子的に埋め込まれた媒体位置情報を前記位置情報埋込領域から抽出するとともに、前記メディア媒体の位置情報が示す位置と対応する当該位置情報埋込領域の位置を示す座標を示す画像座標情報を前記位置情報埋込領域から抽出する位置情報抽出手段と、前記位置情報抽出手段が抽出した前記媒体位置情報および当該媒体位置情報に対応する前記画像座標情報に基づき、前記実空間中における前記カメラの位置と姿勢を示すカメラポーズ情報を算出するカメラポーズ情報算出手段と、を備えることを特徴とする。
(もっと読む)
エッジ検出方法およびエッジ検出装置
【課題】凸レンズの周縁の形状を簡易な構成で精度良く検出することができるエッジ検出方法およびエッジ検出装置を提供すること。
【解決手段】凸レンズ100を撮像する撮像部2を用いて凸レンズ100の周縁の形状を検出させるためのエッジ検出方法であって、出射開口11aが形成されたマスク11の出射開口11aを通じて撮像部2へ向けて拡散光を発し、出射開口11aと撮像部2との間の撮像光学系3の被写界深度内に凸レンズ100を配置し、撮像部2の撮像面4aに、拡散光が凸レンズ100を透過して撮像部2へ入射した第一拡散光L1と、拡散光が凸レンズ100の外部を通って撮像部2へ入射した第二拡散光L2とによってマスク11の像を投影させ、第二拡散光L2による明部とマスク11の像による暗部との境界の形状に基づいて凸レンズ100の周縁の形状を検出することを特徴とする。
(もっと読む)
測定装置及び測定方法
【課題】 パターン投影法により、測定対象物の画像特徴と距離画像とを同時に取得することを目的とする。
【解決手段】 測定装置に、測定対象に投影するパターン光特性の照明光を設定するパターン光特性設定部112と、前記照明光を前記測定対象に照射したときの反射光を測定する反射光測定部120と、測定された前記反射光から測定対象の物理特性に応じた画像特徴を抽出する画像特徴抽出部130と、前記画像特徴の局所領域ごとの分布特性を算出する特徴分布算出部180と、算出された前記局所領域ごとの分布特性に応じて、距離計測用のパターン光特性と、画像特徴抽出用のパターン光特性とを含む前記照明光のパターン光特性を制御するパターン光制御部170とを備える。
(もっと読む)
車輪形状計測装置、車輪形状計測方法、車輪形状計測プログラム
【課題】車輪の径中心を求める必要も、カメラの焦点も変える必要がなく、簡単に光切断法による車輪の形状計測を実行できる車輪形状計測装置等を提供する。
【解決手段】レールに対し所定の高さに設置され、通過センサ11a〜12bによって車輪10aが通過したことが検出された場合、車輪10a,10bの計測部位に向け水平方向にレーザ線条光を照射するレーザ線条光照射部13aと、車輪10a,10bの通過が検出された場合、レーザ線条光が照射された車輪10a,10bの照射部位を撮影するカメラ15a,17aと、それらのカメラ15a,17aが撮影した車輪10a,10bの照射部位の画像を画像処理して、水平方向にレーザ線条光を照射したことに基づく歪を補正する画像処理部18と、歪補正された画像に基づいて車輪10a,10bの形状に関する所定の計測項目を計測する車輪形状計測部19とを有する。
(もっと読む)
球体の位置測定装置及び方法
【課題】円軌道上を公転する球体の位置を好適に測定することができる球体の位置測定装置を提供する。
【解決手段】球体の位置測定装置は、円軌道の中心線O上に中心を有するリング照明18と、前記中心線O上に配置されたレンズ20を有し、前記中心線Oを含む範囲で前記球体13を撮像する撮像部17と、前記撮像部17によって撮像された画像中における、前記球体13の表面で反射した前記リング照明18の反射光を認識し、この反射光の領域の重心位置を求める画像処理部22と、を備える。
(もっと読む)
車輪形状校正冶具、車輪形状校正冶具を用いた校正方法
【課題】校正作業のバラツキを最小限にとどめ、車輪の所定の計測項目を計測する際の計測データの信頼性を向上させることができる車輪形状校正冶具、車輪形状校正冶具を用いた校正方法を提供する。
【解決手段】車輪形状校正冶具10は、光切断法によるレーザ線条光が照射され、所定の計測項目が計測される未使用時の車輪における計測部位と同一寸法であって、かつ、その寸法が既知である計測部位を有する校正冶具本体11と、レール2に対し平行面上において、校正冶具本体11を回転させ、レール2に対し任意のアタック角を設定する回転ステージ12と、レール2に対し平行面上において、校正冶具本体11を前後左右に移動させるX,Y方向移動ステージ13,14と、校正冶具本体11等を搭載し、レール2上に設置される架台15と、を有する。
(もっと読む)
81 - 100 / 463
[ Back to top ]