
Fターム[2F065QQ21]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 形状特定のためのパラメータ抽出 (463)
Fターム[2F065QQ21]に分類される特許
201 - 220 / 463
パラメータ決定支援装置およびパラメータ決定支援プログラム
【課題】計測対象物体を撮像して得られる画像データに対して予め定められたパラメータの組を用いた処理を行うことで処理結果を得る処理装置に設定されるパラメータをより迅速かつ容易に決定できるパラメータ決定支援装置およびパラメータ決定支援プログラムを提供する。
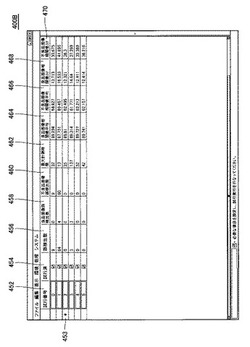
【解決手段】試行された複数のパラメータ候補の各々について、その判定結果および統計的出力が一覧表示されることで、ユーザは、最適なパラメータセットを容易に選択することができる。たとえば、誤検出数がゼロである試行番号「2」,「4」,「5」が安定した処理を行なうことのできるといえ、その中でも、試行番号「2」が最も処理時間が短くて済むので、総合的には、試行番号「2」のパラメータセットが最適であると言える。
(もっと読む)
ワークの表裏判別装置、ナットの表裏判別装置、ワークの表裏判別方法及びナットの表裏判別方法

【課題】表裏のいずれか一方の面の周縁部が曲面となっているワークについて、確実な表裏の判別が可能なワークの表裏判別装置及びワークの表裏判別方法を提供する。
【解決手段】ワークの上面、または、下面の少なくとも一方の面を照明する照明手段と、ワークの照明手段により照明される側の面を撮影する撮像手段と、撮像手段により撮影された画像におけるワークの輪郭形状を検出する判別手段とを備え、判別手段は、撮像手段により撮影された画像におけるワークの輪郭形状と、予め記憶された輪郭形状とを比較することにより、ワークの表裏いずれの面が上面となっているかを判別する。
(もっと読む)
カメラ校正装置、カメラ校正方法、カメラ校正プログラムおよびそのプログラムを記録した記録媒体
【課題】カメラを簡単に校正することができるカメラ校正装置を提供する。
【解決手段】 校正対象のカメラ102を使って参照点の幾何情報が既知である参照物体を撮影して取得した画像において所定の2次元座標系を設定し、用意された参照点の2次元座標値を抽出する参照点調整部104および参照点測定部105を設け、参照物体調整部104によって、前記得られた参照点の中で、一部の参照点が特定の幾何拘束条件を満足するまで参照物体の姿勢または位置を調整し、前記調整された参照物体に対して、参照物体上の全ての参照点の3次元点が画像上の2次元座標系へ射影するときの透視投影条件から導出された計算に従って、参照点の幾何情報と2次元座標上で得た参照点の座標値から、前記カメラ102の内部情報または外部情報を校正するカメラ校正処理部106を設ける。
(もっと読む)
カメラの自動キャリブレーション装置及び自動キャリブレーション方法
【課題】本発明は、カメラの自動キャリブレーション装置及び自動キャリブレーション方法に係り、カメラの位置や向きのズレに起因する撮影画像の画像処理時の計測誤差の発生を防止することにある。
【解決手段】撮影対象として所定基準面を基準にして面対称な特徴点の組を複数有する面対称物体を含むカメラの撮影画像から、面対称物体の面対称特徴点の少なくとも2組を抽出し、その抽出される面対称物体の面対称特徴点の少なくとも2組に基づいて、所定基準面を特定する基準面パラメータ、及び、該面対称物体の面対称特徴点の少なくとも2組を含む面対称構成平面を特定する構成面パラメータを導出する。そして、その導出される基準面パラメータ及び構成面パラメータに基づいて、撮影対象とカメラとの座標系の対応を示す回転パラメータ及び並進パラメータを更新する。
(もっと読む)
パターン検証方法および半導体装置の製造方法
【課題】パターン形状に起因するパターンの加工不良を正確かつ容易に検証できるパターン検証方法を提供すること。
【解決手段】基板上に生成されるパターン形状43からパターン形状43の輪郭44を抽出する輪郭抽出ステップと、輪郭44上にパターン形状43の検証位置となる評価点p1〜p7を所定の間隔で設定する評価点設定ステップと、評価点p1〜p7における輪郭44上の曲率を算出する曲率算出ステップと、曲率が予め設定された所定の閾値を満たすか否かに基づいて、パターン形状43を検証する検証ステップと、を含む。
(もっと読む)
二次元測定装置
【課題】二次元測定機で線幅を測定する際に、照明レベルが線幅測定の安定領域に維持されるように、自動調光のパラメータ設定を作業員に負担をかけずに短時間で容易にできるようにする。
【解決手段】測定物を照明する照明装置と、測定物を撮像する撮像部と、該撮像部からの映像信号の輝度変化から線の縁を検出して線幅を測定できる二次元測定装置において、照明装置の照明レベルを段階的に変化させる照明レベル変化手段(S6、S7、S8、S15)と、照明レベルの各段階毎に線幅を測定する線幅測定手段(S9〜S13)と、線幅、該線幅を測定したときの照明レベル、最大輝度及び最小輝度を記憶する測定値記憶手段(S14)と、記憶した測定値に基づいて線幅測定の安定領域を検出して映像信号の輝度範囲を設定する輝度設定手段(S16)と、映像信号の輝度を設定された範囲内に保持する自動調光手段とを備える。
(もっと読む)
パターン生成装置及びその方法、並びに手袋注文製作装置及びその方法
【課題】手袋注文製作方法とその装置を提供する。
【解決手段】注文管理サーバ300は、計測注文処理装置200から顧客情報と人体をスキャンした結果を入力し、パターン生成装置330で手袋を製作するためのパターン情報を生成し、これに対応して皮革加工装置400に手袋を製作するように要請することを特徴とする。本発明によれば、寸法計測から製作に至るまで全ての注文と生産過程をオンライン上で自動化でき、また人体スキャンのための装備として、高価な3次元人体スキャナ装備の代わりに、安価な2次元人体スキャナ装備を用いてスキャンを行うことによって、製作費用を下げると共に、精密な皮革手袋を生産できるというメリットがある。
(もっと読む)
光散乱計測ターゲット設計の最適化
計測ターゲット設計が、計測ターゲット設計情報、基板情報、プロセス情報および計測システム情報を含む入力を用いて最適化される。測定システムによる測定信号の獲得が、計測ターゲットの1または複数の光学的特徴を生成するために入力を用いてモデル化される。計測システムによりなされた計測ターゲットの測定の予測精度および正確さを決定するために計測アルゴリズムが特徴に適用される。計測ターゲット設計に関する情報の一部が修正され、また、信号のモデル化および計測アルゴリズムが、1または複数の測定の精度および正確さを最適化するために、繰り返される。計測ターゲット設計が、精度および正確さが最適化された後に表示または格納される。 (もっと読む)
円形の幅寸法測定装置
【課題】円形状のエッジを自動検出して円形を求め、該円形の幅寸法の測定を可能にする円形の幅寸法測定装置を提供する。
【解決手段】全体として1または2以上の層を有する円形状の物体を上方から撮像する撮像手段と、前記撮像手段によって得られた画像から前記円形状の仮中心点を求める手段と、前記仮中心点から円形の複数のエッジを求める手段と、前記円形の複数のエッジから仮想円の中心を求める手段と、前記仮想円の中心から仮想円を求める手段と、前記仮想円から検出円を求め、該検出円の幅を円形状の幅寸法とする幅寸法算出手段とを有することを特徴とする円形の幅寸法測定装置。
(もっと読む)
接着剤の膜厚測定装置
【課題】ガラス基板と接着剤の屈折率差の大小に依存することなく、接着剤の膜厚を算出することを可能とする。
【解決手段】膜厚測定装置1は、基台11上に設けられるとともに被検物4を載置させるための加熱器12と、被検物4の加熱温度を制御するための加熱制御部14と、被検物4の上方に配置されていて加熱された被検物4の膨張による高さ方向の変化量を測定するためのレーザー変位計13と、被検物4の接着剤3の線膨張係数を入力するための入力部15と、レーザー変位計13により測定した被検物4の高さ方向の変化量、加熱温度、入力部15で入力した接着剤3の線膨張係数に基づいて接着剤3の膜厚を算出する演算部16とを備えている。
(もっと読む)
カメラキャリブレーションターゲット、およびカメラキャリブレーション方法
【課題】安定した精度でカメラキャリブレーションを実現するキャリブレーション用ターゲットを提供する。
【解決手段】車両に異なる状態で取り付けられたカメラのキャリブレーションを同じ設備で実施する際に使用するカメラキャリブレーション用のキャリブレーションターゲットであって、大きさが異なる複数の相似形の図形より構成され、当該相似図形は大きさの小さい図形がより大きな図形の中にその互いの辺が接触しないように配置され、小さい図形を構成する辺と大きい図形を構成する辺の間に、小さい図形を構成する辺から所定の領域をガードエリアとして有する一連の図形を1つのマーカとし、該マーカを複数配置することを特徴とする。
(もっと読む)
機械部品の非破壊検査の方法
本発明は、機械部品(14)の非破壊検査のための自動化された方法に関し、画像センサ(24)と、照明光源(26)と、画像センサ(24)、光源(26)、および機械部品(14)の相対的移動のための手段(18、22)とを含む、デジタル画像を取得するための機器(10)を使用してデータベース内に記憶される基準画像と部品の表面の画像を比較するステップを含む。 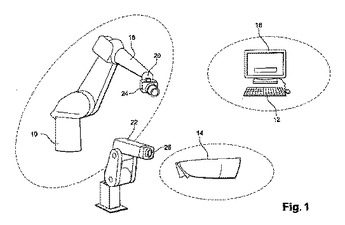 (もっと読む)
(もっと読む)
印刷はんだ検査装置
【課題】プリント板の各点から得られる正反射光及び散乱反射光の2次元の光量分布を基に、はんだ箇所の高さを算出するときの基準位置を容易に求める技術を提供する。
【解決手段】基板1に垂直に近赤外光を照射し散乱反射光を受け、かつ斜めの角度で近赤外光を照射しその正反射光を受ける変位センサ2を備え、度数算出手段4は、散乱反射光量と正反射光量とを2次元とするヒストグラムを生成する。パラメータ決定手段5は、ヒストグラム上で散乱反射光量及び正反射光量が高い側においてほぼピークとなる度数分布を有する基準分布を選定し、基準分布の裾付近の2次元の範囲をパラメータとして決定する。測定検査部100は散乱反射光量及び正反射光量がパラメータの範囲内にある基板上の位置であって、はんだの高さを求めようとするはんだ箇所に近い位置を基準位置として、はんだの高さを求める。
(もっと読む)
植物の葉片の成長を測定するための方法およびそれに適した装置
本発明は、葉片の成長を測定するための方法および装置に関する。この方法は、a)撮影システムを較正するステップと、b)1枚の葉片の少なくとも2枚の画像を撮像するステップと、c)画像データを処理するステップであって、i)しきい値セグメント化によって葉片をセグメント化することと、ii)複数回の形態学的侵食を行うことと、iii)保管容器の縁部を除去するためにエッジ補正することとを含むステップと、d)3D再構成:ステレオアルゴリズムによって視差マップを生成し、事前に特定された較正パラメータに基づいて、視差マップから3D表面モデルを計算するステップと、e)事前に取得された表面モデルを平滑化するステップと、f)面積値の時系列から成長率を算出するステップとによって特徴付けられる。この装置は、少なくとも1台のカメラと、照明ユニットと、カメラおよび(赤外線)照明用のX/Y平面でのスライドテーブルと、葉片用の保管容器と、電子的解析および制御ユニットとを備える。 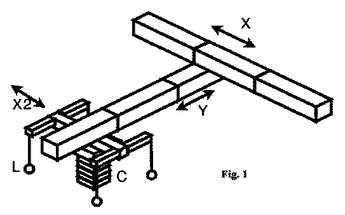 (もっと読む)
(もっと読む)
複合メディア合成装置及び複合メディア表示システム及び複合メディア合成方法及び複合メディア合成プログラム
【課題】3次元形状を計算することが困難な箇所がある領域の3次元地図として、有用なものを作成することを目的とする。
【解決手段】複合メディア合成装置120の3次元地図作成部123は、移動可能な計測装置に搭載されたカメラ、レーザスキャナ、ステレオカメラの出力するデータの少なくともいずれかを用いて計測装置の周辺領域の3次元地図を構築する。メディア合成部125は、カメラの出力する映像データから、3次元地図作成部123が3次元地図を作成できない領域(カメラやステレオカメラで撮影しても映像の精度が悪くなる領域、レーザスキャナのレーザが到達する範囲外の領域)以外の領域の映像を抽出し、抽出した映像と3次元地図作成部123が作成した3次元地図とを合成する。
(もっと読む)
形状測定装置および形状測定方法
【課題】顕微鏡の被写界深度を大幅に超えた立体形状を持つ被測定物を、被測定物や顕微鏡等を移動させることなく、短時間で効率的に、高精度な形状測定を行うことができる形状測定装置および形状測定方法を提供する。
【解決手段】本発明に係る形状測定装置1は、被測定物100に向けて平行光Rを照射する照明装置30と、被測定物100を挟んで照明装置30と対向する位置に、前記平行光の光軸と自身の光軸が一致するように配置される被写界深度の大きな顕微鏡40と、顕微鏡40により拡大された被測定物100の像を、0.2μm乃至2μmの分解能で撮像するカメラ50と、平行光Rが被測定物100の測定部分の外周形状を映し出すように平行光R内に被測定物100の測定部分を配置する保持装置20と、を備える。
(もっと読む)
三次元形状復元装置
【課題】三次元形状復元装置において、観測データ行列(特徴点位置系列)中に複数の物体に由来するデータが混在していても因子分解の実行を可能とする。
【解決手段】複数の物体に由来する特徴点の位置を表す観測データ行列xを因子分解するにあたり、物体の形状を表す形状行列をz、特徴点のそれぞれが属する物体を指定する指定行列をhとし、また、物体uの運動行列We|u ,物体uに由来する特徴点の測定の正確さτ|u,特徴点がそれぞれの物体u(u=1,2,…,U)に属している確率(混合比)gをまとめたものをモデルパラメータをθとして、変分ベイズ推定法を適用し、Eステップでは、第1試験分布q(θ)を固定して第2試験分布q(z,h)を求め、Mステップでは、第2試験分布q(z,h)を固定して第1試験分布q(θ)を求めることで、確率的に因子分解計算を実行する。
(もっと読む)
3次元モデルの作成方法および物体認識装置
【課題】容量をできるだけ少なくして精度の良い3次元モデルを作成する。
【解決手段】3次元認識の対象とするワークの実物モデルWMに対し、ステレオカメラによる3次元計測を複数の方向から実行する。つぎに、各計測により復元された3次元情報のうちの所定数([12][3][6][9]の各計測ポイントの3次元情報)を位置合わせして統合することにより、仮の3次元モデルを作成する。さらに、統合されなかった3次元情報を対象に、仮の3次元モデルによる認識処理を実行し、その認識結果が正しくないと判定された3次元情報(計測ポイント[10]の情報)を仮の3次元モデルに位置合わせしてから統合する。最終的に、正しく認識されなかった3次元情報のすべてが追加された3次元モデルを本登録する。
(もっと読む)
認識処理方法およびこの方法を用いた画像処理装置
【課題】認識精度を確保しつつ、一定の時間内に対象物を認識する処理を終了する。
【解決手段】認識対象物のモデルの特徴点群から各辺の長さが所定の基準値を満たす三角形を抽出し、モデル三角形として登録する。認識対象物の2次元画像から抽出された特徴点群についても同様に、基準値を満たす三角形を抽出して比較対象三角形として登録する。つぎにモデル三角形と比較対象三角形とを順に対応づけ、頂点の対応関係を複数とおりに設定して、対応づけられた頂点(AとA´、BとB´、CとC´)の座標を用いて、両三角形の対応関係を表す変換パラメータを算出する処理と、モデルの特徴点群と対象物の特徴点群との関係に対する当該変換パラメータの適合度を求める処理とを実行する。そして、対応づけ毎に求められた適合度に基づいてモデルの特徴点群と認識対象物の特徴点群との対応関係を示す変換パラメータを特定することによって、対象物を認識する。
(もっと読む)
車両デバイス制御装置
【課題】車両衝突時において、エアバッグを適正に展開すると共に、エアバッグを開くための適正な空間を確保する。
【解決手段】車両1は、制御装置10として、ドライバモニタECU25、チルト&テレスコピックECU310、エアバッグECU35、シートECU47、ドライバサポートECU6を備える。ドライバモニタECU25は、カメラ2と座席4との距離、顔の大きさの変化に基づいて、カメラ2と顔との距離を計算する。ドライバサポートECU6は、レーダセンサ7から入力した障害物との距離に基づいて、衝突が不可避であるか判定する。ドライバサポートECU6は、衝突処理60において、ステアリング3の位置、座席の位置を入力して、ドライバサポートECU6内に記憶した制御の優先順位のデータに基づいて、ステアリング3の位置、座席の位置、エアバッグ装置36のいずれの制御の優先順位を高くするかを決定する。
(もっと読む)
201 - 220 / 463
[ Back to top ]