
Fターム[2F065RR10]の内容
光学的手段による測長装置 (194,290) | 比較基準データの作成、設定 (2,769) | その他 (23)
Fターム[2F065RR10]に分類される特許
1 - 20 / 23
画像処理装置、画像処理方法及びコンピュータプログラム
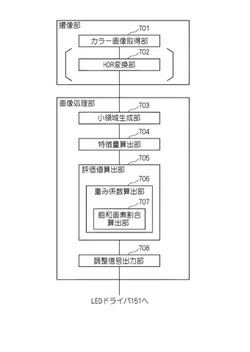
【課題】背景が含まれる場合であっても、背景の明るさの影響を低減して検査対象物表面の明るさを自動的に調整することができる画像処理装置、該画像処理装置で実行する画像処理方法及びコンピュータプログラムを提供する。
【解決手段】検査対象物を含む撮像領域を撮像する撮像部と、撮像領域を前記撮像部で撮像した画像に対して画像処理を実行する画像処理部とを備える。画像処理部は、撮像部から出力された画像の撮像領域内に設けられ、各々が複数の画素を含む複数の小領域ごとに、検査対象物が存在する可能性を示す特徴量を算出する。算出した特徴量に基づいて、少なくとも検査対象物を含む画像の明るさの評価値を算出し、算出した評価値に基づいて、画像の明るさを調整するための調整信号を出力する。
(もっと読む)
表面角度計測方法及び表面角度計測装置

【課題】物体表面の角度の検出感度を向上させることができると共に、計測装置から物体表面までの計測距離に依存することなく精密に物体表面の角度を計測することができる表面角度計測方法及び表面角度計測装置を提供することを目的とする。
【解決手段】
計測対象2の表面に計測光を照射すると共に、当該計測対象2で反射した計測反射光を受光することで計測対象2の表面の傾斜角度を計測する表面角度計測装置1において、計測反射光を金属薄膜11で受光すると共に、金属薄膜11で表面プラズモン共鳴を生じさせるプラズモンフィルタ部9を備える。さらに、その表面プラズモン共鳴が生じた金属薄膜11からの反射光の強度を計測する強度検出部15と、強度検出部15で計測された反射光の強度を基に、計測対象2の表面の傾斜角度を算出する傾斜角度算出手段を有する演算部4と、を備える。
(もっと読む)
列車種別検出装置
【課題】列車の種別を判別し、あらゆる車種について乗降扉の位置検出を正確に行う。
【解決手段】列車前端の排障器5を含む領域を撮影する第1カメラ7と、列車後端の排障器6を含む領域を撮影する第2カメラ8からの撮像情報に基づいて列車前端及び後端の位置を求めるとともに、この両位置間の距離である列車長を算出し、この列車長から列車の種別を判別することにより、乗降扉の位置を検出する。また、列車前、後端位置を求めるに際して、カメラ視野に応じた重み付けを行い、合成演算するようにした。
(もっと読む)
三次元位置姿勢計測方法および装置
【課題】物体(対象物)の画像教示なしに、1台のカメラで物体の位置と姿勢を正確に検出することができる三次元位置姿勢計測方法および装置を提供する。
【解決手段】対象物1のモデルデータ5を予め記憶するモデル入力ステップS1と、検出する対象物を撮影して画像2を取得する画像撮影ステップS2と、画像2からモデルデータに対応する画像上の特徴データ6を抽出する特徴抽出ステップS3と、モデルデータと画像上の特徴データとの幾何学的一致度を評価する一致度評価ステップS5と、モデルデータが幾何学的一致度の高い画像上の特徴データの位置に移動するように座標変換式を算出する座標変換ステップS7と、座標変換式により対象物1の三次元位置姿勢を決定する位置姿勢決定ステップS8とを有する。
(もっと読む)
立体メジャー表示機能付き画像表示システム及び立体メジャー表示機能付き画像表示のプログラム
【課題】 道路、河川、水路、管路内の360度の全周囲画像上で瞬時に、かつ容易に幅、高さ、奥行きを判断できる立体メジャーを周囲画像に表示する立体メジャー表示機能付き画像表示装置を得る。
【解決手段】 立体メジャー表示機能付き画像表示装置は、360度の全周囲画像を記憶したデータベース10と、カメラ高さ等を記憶したデータベース11と、全周囲画像情報取出部13と、平面画像生成部15と、全周画像位置算出部16と、立体メジャー出力部17と、立体メジャー生成部18と、表示制御部19と、表示部20等を備えて、任意地点における指定方向の全周囲画像(360度)上に立体メジャーを重ね表示する。
(もっと読む)
膜厚測定装置
【課題】測定のSN比を低下させることなく、光ファイバの先端部に窓材を付加し、光ファイバ先端部の汚れや破損を防止することのできる膜厚測定装置を簡単な構成により実現する。
【解決手段】 白色光を投光側光ファイバを介して被測定面に照射するとともに、この被測定面からの反射光を受光側光ファイバで受け、この反射光を利用して前記被測定面に形成された薄膜の膜厚を測定する膜厚測定装置において、前記投光側光ファイバの出射端と前記受光側光ファイバの受光端とを隣接して配置するとともに、この両光ファイバの端部の前方に窓材を配置し、前記投光側光ファイバから出射される白色光の光軸に対して前記窓材の取付角度を垂直状態から傾斜させる。
(もっと読む)
パターン測定方法、パターン測定装置およびプログラム
【課題】パターンの寸法測定に際して寸法測定範囲(ROI)を自動的に設定する。
【解決手段】実パターンの輪郭ER1〜EDRの像と、実パターンの設計図形とのマッチングを実パターンの画像上で行い、設計図形の輪郭線ED1〜ED4に内接または外接する円CL1〜CL10を設計図形に当てはめ、円CL1〜CL10と輪郭線ED1〜ED4との接点を基準に寸法測定範囲(ROI)RA〜RH,RJ〜RQ,RS,RTを決定する。
(もっと読む)
クロマティック共焦点三次元計測技術のための迅速かつ強力な方法および装置
多色点光源のアレイと、横方向のスペクトル分離のための手段の前に配置された平面検出器マトリクスと、物体の照射および撮像のための対物レンズとを有する、特に物体形状、特に人間の顎内の歯を迅速に三次元計測するためのクロマティック共焦点技術のための方法および装置である。本発明によって、色較正のために、スペクトル定義された基準光束が点光源のアレイの部品を使用して生成され、その際、この基準光束が基準光路を経て横方向の色分離のために検出器光路内で結合され、引き続き検出器マトリクス上で基準点画像として合焦される。検出器マトリクス上でスペクトル基準点の位置が算出され、この位置を利用してサブマトリクスが物体光のスペクトル分析のために検出器マトリクス上に高いピクセル精度で画定され、これは次いで計測値を取得するために利用されることで、検出器マトリクスは完全に細長いサブマトリクスで塞がれることができ、その際、平面アレイは平面検出器マトリクス上のスペクトル軸に対して鋭角だけ回転されて配置され、この回転は、点光源が検出器マトリクスの平面に投影される際に、点光源の連結線が平面でスペクトル軸、すなわちλ軸と鋭角をなすように装置の光軸(OA)を中心に行われる。  (もっと読む)
(もっと読む)
光学測定装置
【課題】試料の任意の点に合焦位置を確実に誘導することができる光学測定装置を提供する。
【解決手段】光源11からの光を試料8に対して集束させる対物レンズ7と、集束光の光軸方向に沿って対物レンズ7の集光位置と試料8の位置を相対的に移動させるZレボルバ21を有し、予め入力されるオフセット情報づいてZレボルバ21による対物レンズ7の集光位置を制御する。
(もっと読む)
光センサによるセンシング方法及び装置
【課題】清浄で且つ高温環境下となる検出領域にて被検出体の有無を精度よく検出できるようにする。
【解決手段】石英ボックス1の側壁1aに開口部2を設け、パイプ状の結合用部材6を貫通するよう取り付ける。結合用部材6内にて、細長い円柱形状として、先端部が石英ボックス1内の検出領域4の近傍まで達するよう配置した石英ガラス部材3cの基端部と、反射型光ファイバセンサ8の平行型光ファイバ17の先端部を取り付ける。平行型光ファイバ17の投光用光ファイバ素線10を通して導かれる光13を、石英ガラス部材3cを通して損失が少ない状態で検出領域4の近傍まで導いてから、検出領域4に向けて投光させる。検出領域4に被検出体5が存在する場合に生じる反射光13aは、検出領域近傍にて石英ガラス部材3cの先端面で受けた後、石英ガラス部材3c内を損失が少ない状態で導いてから、受光用光ファイバ素線12へ受光させる。
(もっと読む)
距離測定装置
【課題】 複数のカメラを用意する必要がなく、1回の撮影により正確な測定を行なうことができる距離測定装置を提供する。
【解決手段】 本発明は、プロジェクタ4によって投影された測定用投影オブジェクトをカメラ5によって撮影し、この撮影されたカメラ画像から、プロジェクタ4及びカメラ5の特性パラメータを利用して測定用投影オブジェクトまでの距離を算出するものである。
(もっと読む)
温度/厚さ測定装置,温度/厚さ測定方法,温度/厚さ測定システム,制御システム,制御方法
【課題】 厚さの薄い測定対象の温度又は厚さの測定精度を向上させる。
【解決手段】 光源110と,光源からの光を測定光と参照光とにスプリットするためのスプリッタ120と,スプリッタからの参照光を反射するための参照光反射手段140と,参照光反射手段から反射する参照光の光路長を変化させるための光路長変化手段(例えば参照光反射手段を駆動する駆動手段142)と,測定対象を透過又は反射する測定光と参照光反射手段から反射する参照光とが干渉して得られる複数の測定光の干渉波形を測定するための受光手段150とを備え,測定された測定光の干渉波形のうちのある干渉波形を基準とし,この基準干渉波形の測定光よりも測定対象の両端面を少なくとも2回以上多く往復反射する測定光の干渉波形を選択干渉波形として,各干渉波形により測定対象の両端面間における測定光の光路長を測定し,その光路長に基づいて測定対象の温度を測定する。
(もっと読む)
構造体監視システム
構造体の境界上に敷設された光ファイバセンサ2を用いてこの光ファイバセンサ3が敷設された境界Г上の各点における構造体Sの歪みを計測する計測部3と、この計測部3による測定歪みを境界条件として構造体Sの所定の点における歪みを数値解析手法により算出する数値解析部5と、この数値解析部5による解析歪みに関する情報を構造体Sの位置と関連付けて表示する表示部6とを備える。 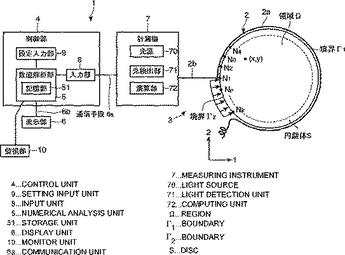 (もっと読む)
(もっと読む)
非接触画像測定機の測定方法
【課題】非接触測定機の測定範囲よりも広い範囲を、非接触測定機を移動しながら簡単且つ高精度に測定できるようにする。
【解決手段】複数のマーカー42、46をワーク設置用プレート40上に分散配置して、値付けし、該プレート40上に配置したワーク30、30’、30a、30b、30cを、前記マーカー42、46の一部も測定範囲14に含めて、非接触測定機10により測定し、前記マーカー42、46の位置とワーク30の関係により、各測定点の測定値を合成する。
(もっと読む)
表面形状測定方法及び表面形状測定装置
【課題】 ガラス基板等の薄板の表面形状を精度よく測定することができるようにする。
【解決手段】 一対の反射型センサ75及び76を備えて一対の反射型センサの間に配置された薄板Wの表面形状を測定する際、一対の反射型センサを所定の間隔をおいて配置するとともに、所定の間隔方向と直交する面において一対の反射型センサを互いに所定のずれ量だけずらして配置して、薄板及び一対の反射型センサを直交する面に沿って相対的に移動させて薄板表面を走査して薄板の表面形状を得る。
(もっと読む)
非球面形状測定方法
【課題】干渉計による非球面測定が低コストで実現可能であって、尚且つ高精度に面形状測定が可能な非球面形状測定方法を提供すること。
【解決手段】被検物上の被検面で反射した被検光と参照波面を有する参照光とを互いに干渉させることにより得られる干渉縞を検出器により検出し、検出された干渉縞の情報に基づいて前記被検面の面形状を測定する干渉計において、干渉計により被検面の面形状を測定する実測定工程と、前記干渉計内の光学素子の情報を用い屈折の法則に基づいて光線が通る座標を計算する所謂光線追跡により前記干渉計による面形状測定の模擬実験を行う模擬実験工程と、前記実測定工程により測定した面形状実測定データと前記模擬実験工程により計算した面形状模擬実験データが一致するように前記被検面形状を定め面形状測定結果として出力する面形状決定工程を備える。
(もっと読む)
外観検査装置及びPTP包装機
【課題】検査精度及び検査効率の飛躍的な向上を図ることのできる外観検査装置及びPTP包装機を提供する。
【解決手段】外観検査装置21は、照明装置22、各カメラ23E,23H,23S及び画像処理装置24等を備えている。シート異物・錠剤異物に関する検査、錠剤表面剥離に関する検査、及び、シール不良に関する検査がほぼ同一のポジションで行われ、1台の照明装置22で照射態様が切り換えられる。また、所定の検査に際しては、他の1つの検査において認識した錠剤の位置情報及びポケット部の位置情報のうち少なくとも一方が利用可能とされる。所定の検査に際し、錠剤、ポケット部位置の検出ができなかったとしても、他の検査における正確な情報を利用できるため、正確な位置情報に基づいた正確な検査を実行でき、また手動入力といった煩わしさも払拭できる。
(もっと読む)
キャリブレーション装置および方法、ならびにそれらを利用可能な3次元モデリング装置および3次元モデリングシステム
【課題】 カメラ付き3次元座標計測用多関節アームシステムを用いて撮影画像から3次元モデリングを行うためには、正確なカメラ位置情報が必要である。
【解決手段】 回転台10とカメラ付き3次元座標計測用多関節アームシステム40の位置関係は、回転台座標系からアーム基準座標系への変換行列M1により規定され、カメラ設置軸20dとカメラ30の位置関係は、カメラ設置座標系からカメラ座標系への変換行列M2により規定される。これらの位置関係を事前にキャリブレーションする。アーム基準関節18aとカメラ設置関節18cの位置関係を規定するアーム基準座標系からカメラ設置軸座標系への変換行列Maはカメラ付き3次元座標計測用多関節アームシステム40のアーム出力データから得られる。任意のアームポジションにおける回転台−カメラ座標変換行列M0は、計算式M0=M2・Ma・M1により算出される。
(もっと読む)
マスクパターン幅測定方法及び測定装置
【課題】 エッチング用のマスクパターン幅を、非接触、非破壊、高速で測定でき、特に、プロセス中に測定できるようにする。
【解決手段】 ウェハ11上のレジストパターン15のピッチより長い連続した多波長の光を発生する赤外光源1と、この赤外光源1から発生された光をウェハ11に集光するとともに、ウェハ11から反射した光を所定方向に導くレンズ3及び2分岐光ファイバ2と、2分岐光ファイバ2によって導かれる光を入射させてスペクトルに分解し、電気信号として出力する赤外分光器4と、この赤外分光器4から出力される分光スペクトル信号に基づいてレジストパターン幅を算出する線幅演算部5とを具備する。
(もっと読む)
液滴計測装置、液滴計測方法、液滴塗布装置及びデバイス製造装置並びに電子機器
【課題】 簡易な構成でありつつも、実際の液滴を1滴ごとに高速に計測可能な液滴計測装置および液滴計測手段を提供すること。
【解決手段】 液滴180の飛翔経路にレーザ光130を発生するレーザ光発生部120と、レーザ光130の強度を電気信号に変換する光電変換部150と、該電気信号を処理する信号処理部160とを備え、該信号処理部160は、前記液滴が前記レーザ光を通過するときの前記光電変換部150の信号強度と該液滴の重量との関係式を記憶しており、該関係式に基づいて、前記光電変換部150から入力された信号強度に対応する液滴の重量を計算する。
(もっと読む)
1 - 20 / 23
[ Back to top ]