
Fターム[2F067RR30]の内容
波動性又は粒子性放射線を用いた測長装置 (9,092) | 信号処理、電源関連 (1,540) | 信号の記憶 (206) | 画像信号の記憶 (129)
Fターム[2F067RR30]に分類される特許
121 - 129 / 129
走査型電子顕微鏡及び半導体検査システム
【課題】走査型電子顕微鏡の撮像画像の画質を向上させる。
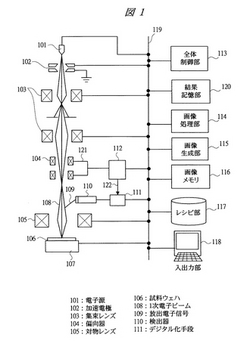
【解決手段】1次電子ビーム108を試料ウェハ106に照射する電子源101、加速電極102、集束レンズ103、偏向器104、対物レンズ105等と、試料ウェハ106から発生する放出電子信号109をサンプリングしてデジタル画像を取得する検出器110、デジタル化手段111等と、取得した前記デジタル画像の記憶、表示もしくは処理を行う画像メモリ116、入出力部118、画像生成部115、画像処理部114等とを備えた走査型電子顕微鏡に、前記記憶、表示もしくは処理されるデジタル画像の画素サイズよりも細かい間隔で放出電子信号109をサンプリングするサンプリング手段と、サンプリングされた放出電子信号109を元に画素サイズを大きくしてデジタル画像を生成する画像生成処理手段とを設ける。
(もっと読む)
試料寸法測定方法及び走査型電子顕微鏡

【課題】半導体試料等の表面に形成されたパターン等の体積減少を抑制、或いは減少に関わらず正確な測長を行う。
【解決手段】荷電粒子線を試料上で走査し、試料より放出された二次電子に基づいて、試料上に形成されたパターン等の線幅等を測長する荷電粒子線装置において、試料の物性に基づいて決定される照射密度を上回らないように前記荷電粒子線の走査線間隔を設定する。或いは予め記憶された近似関数に基づいて測長値を演算する。
(もっと読む)
石英ガラス製ランプ用バルブの計測装置
【課題】小型かつ安価な装置により、石英ガラス製ランプ用バルブを高精度に計測できるようにする。
【解決手段】X線管の管電圧を40kv〜100kvとしたX線発生装置と、X線シンチレータ付きファイバオプティクプレート3a,3bとCCD3cとをダイレクトカップリングしてなるエリアセンサとを設けるとともに、エリアセンサの受像面側に石英ガラス製ランプ用バルブ(被計測物)2を30mm以下の離間距離で配置し、エリアセンサで得た石英ガラス製ランプ用バルブの可視像を処理する制御部を設け、制御部は、積算フレーム数設定部と、積算フレーム数設定部で設定された数に達した各フレームの画像を積算処理する画像処理部と、該画像処理部で処理された画像から石英ガラス製ランプ用バルブを計測する画像計測部とを有する構成にする。
(もっと読む)
X線透視装置
【課題】 比較的簡単なソフトを用いて、電極等の尖頭部の位置を正確に検出することのできるX線透視装置を提供する。
【解決手段】 透視対象物Wを透過したX線を検出するX線検出器2の出力に基づくX線透視像を画像処理する画像処理装置7に、透視対象物Wの尖頭部の座標を計測する機能を持たせ、その機能においては、X線透視像の輝度情報から粒子解析に基づいて透視対象物の端点を検出して、尖頭部の直交座標のうちの一方の座標を決定し、その座標情報に基づくエッジ検出により、他方の座標を決定する。
(もっと読む)
パターン検査装置
【課題】走査型顕微鏡を用いた半導体装置検査工程においてパターンのラインエッジ形状を高精度で広範囲に渡って抽出するための各種パラメータを簡便に最適化する。
【解決手段】走査型顕微鏡の制御系ないし隣接する端末から画像処理工程で必要になる各種パラメータのうち操作者に理解しやすいものを入力すると、残りのパラメータが自動的に最適化されるようにする。必要な走査線の本数が装置側の可能な値を超えた場合は複数の画像データに分けて走査し取得した画像を重ね合わせて1枚の画像とする。
(もっと読む)
欠陥分析器
本発明は、半導体ウェファのようなオブジェクト内の欠陥を分析する方法とデバイスとシステムを提供する。ある実施の形態において、それは半導体製造施設内での製造中に半導体ウェファの欠陥をキャラクタライズする方法を提供する。その方法は以下のようなアクションからなる。半導体ウェファは検査されて欠陥を探し出される。そして、探し出された欠陥に対応する位置が欠陥ファイルに格納される。複式荷電粒子ビームシステムが、欠陥ファイルからの情報を用いて、自動的にその欠陥位置の近傍にナビゲートされる。その欠陥が自動的に特定され、欠陥の荷電粒子ビーム画像が得られる。そして、その荷電粒子ビーム画像は分析され、欠陥をキャラクタライズする。次いで、欠陥の更なる分析のためにレシピが決められる。このレシピが自動的に実行されて、荷電粒子ビームを用いて欠陥部分をカットする。そのカット位置は荷電粒子ビーム画像の分析に基づく。最後に、荷電粒子ビームカットによって露呈された表面が画像化されて、欠陥についての追加の情報を得る。  (もっと読む)
(もっと読む)
画像内にあるオブジェクトのスケーリングを可能にするための画像処理装置、イメージングシステム、コンピュータプログラム及び方法
本発明は画像内にあるオブジェクトをスケーリングする画像処理装置に関する。前記画像処理装置は、マーカの実際の寸法と、画像内にあるこのマーカのピクセル単位での寸法との間の関係から得られる較正係数に基づいて前記オブジェクトをスケーリングするキャリブレータを有し、ここでキャリブレータはさらに、前記画像内において識別される複数の異なる配向のマーカを使用して得られる複数の較正係数を生成する。画像(I)は、解剖学的構造(2)対してこれらオブジェクトの異なる位置合わせとなる、空間において異なって配向される複数のオブジェクト(3、8、9)を有する。前記オブジェクト(3)は計測ツールにリンクされ、これは前記オブジェクト(3)のピクセル単位での長さを計測し、マーカ(A)から決められる較正係数を使用して、前記オブジェクト(3)の実際の寸法を計算する。前記マーカは空間においてオブジェクト(3)と同様に位置合わせされる。画像(I)はさらに、計測ツールにリンクされるオブジェクトを有し、これは、これらオブジェクトのピクセル単位での夫々の長さに基づいてこれらオブジェクト(8、9)の実際の長さ、及び前記マーカ(B)を使用して決められる較正係数を計算する。好ましくは、別々のマーカに対応するオブジェクトがグループ化され、較正グループを形成し、これにより、較正係数の更新が同じ較正グループ内にある全てのオブジェクトに対する実際の寸法の自動更新となる。好ましくは、各較正グループはユーザの便宜に対し別々に識別される。本発明はさらに、画像内にあるオブジェクトのスケーリングを可能にするためのイメージングシステム、コンピュータプログラム及び方法にも関する。  (もっと読む)
(もっと読む)
ワークピースの座標を確定するための方法
本発明は、ワークピース(9)に対して不動に位置決めされている第一座標系を固定すること、 ワークピース(9)の第一座標を、第一座標測定装置(3)を使用することにより測定すること、 ワークピース(9)の第二座標を、第二座標測定装置(5)を使用することにより測定すること、そして 第一座標と第二座標から、共通の座標組を、ワークピース(9)に不動に位置決めされた座標系に対する第一座標系においてあるいは第二座標系において作ることを特徴とするワークピース(9)の座標を確定するための方法に関する。特に多数のワークピース(9)の座標はワークピース(9)の製造工程および/または加工工程の最中および/または後に確定することができる。さらに本発明はワークピース(9)が両座標測定装置(3,5)を用いた測定の間に位置および/または姿勢が変化する場合にも関する。 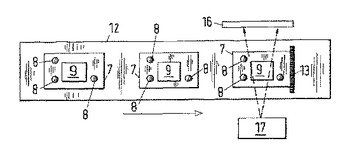 (もっと読む)
(もっと読む)
プリント基板の半田検査方法およびその装置
【課題】 従来の半田付け状態を検査するためにサブトラクション処理を行うと、吸収係数の差の情報が画像化されるために、信号成分が小さくなり相対的にノイズが大きくなる。そこで、このノイズを軽減するためには、長時間撮影による積算が有効であるが、検査時間が長くなるといった問題があった。
【解決手段】 撮影条件を変えて同一部分におけるプリント基板上の実装部品の第1、第2のX線画像からエネルギーサブトラクション処理によって第3の画像を得、前記第1または第2の画像から第3の画像を差し引いて回路パターンのみの第4の画像を得、該第4の画像を平滑化フィルタ処理を行ってノイズを除去して第5の画像を得、前記第1または第2の画像から第5の画像を差し引いて半田のみの第6の画像を得、この第6の画像から半田の良否を判定するようにしたプリント基板の半田検査方法である。
(もっと読む)
121 - 129 / 129
[ Back to top ]