
Fターム[2F077AA03]の内容
感知要素の出力の伝達及び変換 (32,270) | 目的、特徴、課題 (5,635) | 異常、故障、断線又は誤りの検出 (429) | 2相信号の所定関係によるもの (62)
Fターム[2F077AA03]に分類される特許
1 - 20 / 62
エレベータのエンコーダ監視装置およびエレベータのエンコーダ監視方法
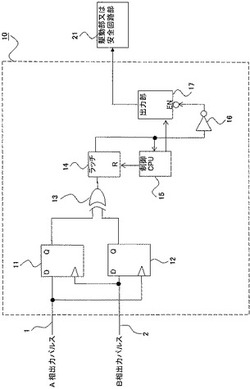
【課題】ハードウェアの簡素化、および低コスト化を実現する。
【解決手段】エンコーダから出力される2つのパルス信号の状態変化に基づいてパルス抜けを検出するものであって、第2のパルス出力信号の立上りエッジをDラッチ用のトリガ信号として使用し、第1のパルス出力信号の状態をラッチする第1のDラッチ回路部(11)と、第1のパルス出力信号の立上りエッジをDラッチ用のトリガ信号として使用し、第2のパルス出力信号の状態をラッチする第2のDラッチ回路部(12)と、Dラッチ回路部(11、12)のそれぞれのラッチ信号の排他的論理和を出力する排他的論理和ロジック部(13)と、排他的論理和ロジック部からの出力信号がHigh状態からLo状態に切り替わったことで、パルス抜けを検出し、異常信号として外部に出力する出力処理部(14、16、17)とを備える。
(もっと読む)
回転センサ、及び回転角検出装置

【課題】信号線の短絡異常をより的確に検出することのできる回転センサ、及び回転角検出装置を提供する。
【解決手段】レゾルバ2は、ロータ20の周方向R1に離間して配置される3つのレゾルバコイル23〜25と、レゾルバコイル23〜25に電圧を誘起させるべく通電に基づき磁界を生成する励磁コイル22とを有している。そして、ロータ20の回転に伴って励磁コイル22から3つのレゾルバコイル23〜25に付与される磁界が変化したときにレゾルバコイル23〜25に誘起される電圧が変化することで、ロータの回転角θに対して振幅が正弦波状に変化する3相の信号Va〜Vcを出力する。ここでは、第1〜第3のレゾルバコイル23〜25のうちの互いに隣り合う同士の位置がロータ20の周方向R1にずれている角度を第1〜第3の分割角度θ1〜θ3とするとき、第1〜第3の分割角度θ1〜θ3が全て異なる値に設定されている。
(もっと読む)
光学式アブソリュートエンコーダ及び装置
【課題】90度位相差の2つの正弦波信号を内挿演算することによって高分解能で回転位置を検出する光学式エンコーダにおいて、部品を追加することなく容易な手段で光学系の異常を検出することが可能な光学式エンコーダを提供する。
【解決手段】90度位相差の2つの正弦波信号をそれぞれ2乗して加算する2乗和演算器と、信号の異常レベルを記録する異常信号メモリと、信号の異常を判定する異常判定器からなり、前記2乗和演算器で求めた演算結果が、前記異常信号メモリに記録した値より下回った場合に前記異常判定器が異常信号を出力する。
(もっと読む)
レゾルバ信号処理装置
【課題】浮遊容量の影響を受けることなく、簡素な構成で確実に断線を検出することができるレゾルバ信号処理装置を提供する。
【解決手段】入力回路11は、第1出力巻線L11との間で断線が発生したとき、所定タイミングにおける第1出力信号の値が中心値になるように第1出力巻線L11に対する入力インピーダンスが調整されている。入力回路12は、第2出力巻線L12との間で断線が発生したとき、所定タイミングにおける第2出力信号の値が中心値になるように第2出力巻線L12に対する入力インピーダンスが調整されている。つまり、浮遊容量がある場合でも、正常時に交流であった出力信号が断線時には所定タイミングにおいて必ず中心値になる。所定タイミングにおける第1出力信号の値と第2出力信号の値に基づいて判断することで、浮遊容量の影響を受けることなく、簡素な構成で確実に断線を検出することができる。
(もっと読む)
位置検出装置及び位置検出方法
【課題】温度特性のバラツキを解消し、縦方向のガタツキによる誤差をなくすようにした位置検出装置及び位置検出方法を提供すること。
【解決手段】ホール素子(22a)のホール電圧Vhe1は、A・K・Bhe1(Aはプレアンプ(32)の増幅率、Kは定数、Bhe1はホール素子が受ける磁束密度)になったとすると、PIレギュレータ(41)はフィードバック制御によってA・K・Bhe1+Vref=AGND(=0)になるように、PI出力のバイアス点を自動的に変化させる。増幅後のホール素子(22b)のホール電圧Vhe2はA・K・Bhe2となる。K=−Vref/A・Bhe1であるから、ホール素子のホール電圧Vhe2は、−Vref・Bhe2/Bhe1となる。ホール電圧は、磁束密度と比例するので、ホール素子(22a)とホール素子(22b)の出力電圧を割り算していることと等価である。
(もっと読む)
レゾルバ
【課題】励磁コイル平板や検出コイル平板自体が、円周方向において、波打ち等の変形を成している場合であっても、高精度を維持できるレゾルバを提供すること。
【解決手段】(a)SIN信号検出コイル10が、円周方向に2分割され、かつ径方向にも2分割されており、外周側にSIN第1コイル11とSIN第2コイル12が配置され、内周側にSIN第3コイル13とSIN第4コイル14が配置されていること、(b)SIN第1コイル11とSIN第3コイル13が円周方向で対向して配置され、SIN第2コイル12とSIN第4コイル14が円周方向で対向して配置されていること、(c)SIN第1コイル11とSIN第4コイル14が第1コイル層5に配置され、SIN第2コイル12とSIN第3コイル13が第2コイル層3に配置されていること、を特徴とする。
(もっと読む)
磁界角計測装置,回転角計測装置およびそれを用いた回転機,システム,車両および車両駆動装置
【課題】磁気抵抗素子をブリッジ構成で用いた回転角計測装置において、異常が発生すると正しい角度が出力されないので、それを用いた上位システムも機能停止するという課題があった。
【解決手段】ブリッジ60,61をそれぞれ構成するハーフブリッジのうち、正しい方のハーフブリッジの出力信号に基づいた磁界角度(回転角度)を信号151として出力する。
(もっと読む)
回転角検出装置
【課題】複数のセンサの出力信号うちの1つの出力信号に異常が発生した場合に、異常が発生した出力信号を特定できるとともに、正常な他の出力信号に基づいて正確な回転角を演算することが可能となる回転角検出装置を提供する。
【解決手段】回転角演算装置20は、第1の回転角演算部21、第2の回転角演算部22、第3の回転角演算部23、異常監視部24および最終回転角演算部25を含む。異常監視部24は、第1、第2および第3の出力信号V1,V2,V3に基づいて、各出力信号V1,V2,V3が正常であるか異常であるかを判定する。最終回転角演算部25は、異常監視部24の最終判定結果と、第1、第2および第3の回転角演算部21,22,23によってそれぞれ演算された第1、第2および第3の回転角θ1,θ2,θ3に基づいて、最終的な回転角θを演算する。
(もっと読む)
回転角度検出装置
【課題】主に自動車のブレーキペダル等の回転角度検出に用いられる回転角度検出装置に関し、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能なものを提供することを目的とする。
【解決手段】磁石16の回転中心に対して所定角度間隔で、複数の磁気検出素子18Aと18Bを対向配置すると共に、磁気検出素子18Aと18Bからの検出信号L1とL2を加算または減算して回転角度を検出する第一の制御回路19と、検出信号L1とL2を除算した後、逆関数に変換して回転体12の回転角度を検出する第二の制御回路21と、印加された電圧に応じて、第一の制御回路19と第二の制御回路21のいずれを動作させるか切換えるスイッチング回路24を備えることによって、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能な回転角度検出装置27を得ることができる。
(もっと読む)
回転角度検出装置
【課題】主に自動車のブレーキペダル等の回転角度検出に用いられる回転角度検出装置に関し、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能なものを提供することを目的とする。
【解決手段】回転体12に装着された磁石16の回転中心に対して、所定角度間隔で複数の磁気検出素子18Aと18Bを対向配置すると共に、制御回路19が複数の磁気検出素子18Aと18Bからの検出信号L1とM1を加算または減算し、演算信号N1やP1から回転体12の回転角度を検出することによって、高精度な回転角度の検出が行えると共に、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が可能な回転角度検出装置を得ることができる。
(もっと読む)
回転角検出システムの異常診断装置
【課題】1入力2出力タイプのレゾルバを用いた回転角検出システムの異常検出不可領域を狭くして異常検出率を向上させる。
【解決手段】回転角検出システムの出荷前の検査時に、回転角検出システム毎に、レゾルバ11の2つの出力信号(SIN信号とCOS信号)の2乗和を正常時の診断指標として算出し、その正常時の診断指標を基準にして異常判定閾値を算出してEEPROM19等の書き換え可能な不揮発性メモリに記憶する。これにより、そのシステムの回路誤差に応じて正常時の診断指標が変化するのに対応して異常判定閾値を変化させて、異常判定閾値を適正値に設定する。この後、レゾルバ11の2つの出力信号の2乗和を診断指標として算出し、その診断指標を異常判定閾値と比較して、回転角検出システムの断線(例えば、励磁信号線の断線、SIN信号線の断線、COS信号線の断線等)の有無を判定する。
(もっと読む)
回転検出装置
【課題】第1センサ部の出力信号が所定レベルから変化しなくなる異常が生じている場合であれ、回転体の回転角度の変化量を的確に把握することができる。
【解決手段】クランクポジションセンサ42はクランクシャフト31が所定角度回転する毎にパルス状の信号を出力するメインセンサ61、サブセンサ62を有し、これらは互いに位相のずれた信号を出力する。サブ信号がハイレベルであり且つメイン信号が変化したとの条件が成立したときにこのときのメイン信号の変化方向に応じて異なるパルス幅のクランク信号を出力する。ECU41は、サブ信号がハイレベルから変化しなくなる異常が生じているか否かを判定し、同異常が生じている旨判定された場合にクランク信号のパルス幅と機関回転速度と上記異常時に出力されるクランク信号数との対応関係に基づき当該出力されるクランク信号数を正常時におけるクランク信号数に換算する。
(もっと読む)
エンコーダ
【課題】符号板の高速移動時においても位置検出の信頼性の低下を低減できるエンコーダを提供する。
【解決手段】エンコーダ(100)は、位置情報を示すパターンを有する符号板(10)と、位置情報を示すパターンを検出する検出部(20)と、位置情報に基づいて、第1の処理が行われる第1経路と、位置情報に基づいて、第2の処理が行われる第2経路と、第1の処理の第1処理結果と第2の処理の第2処理結果とに基づいて第3の処理をする処理部(39又は41)と、第1経路から処理部への第1処理結果の出力タイミングと第2経路から処理部への第2処理結果の出力タイミングとを同期させるように、第1経路と第2経路とにおける出力タイミングの遅延時間を調整する遅延時間調整部(60)とを備える。
(もっと読む)
回転角検出装置のための異常検出装置
【課題】レゾルバを用いた回転角検出装置の正常または異常を的確に速やかに検出する。
【解決手段】レゾルバ30は、正弦波信号により励磁されてロータ31のステータ32に対する回転角に応じて振幅変調されるとともに振幅の変化が互いにπ/2だけ位相の異なる正弦波相出力信号および余弦波相出力信号を出力する。正弦波相振幅計算部61および余弦波相振幅計算部62は正弦波相および余弦波相出力信号の振幅を計算し、回転角計算部63がこれらの振幅を用いて回転角θを計算する。異常判定部68は、前記各振幅の2乗和平方根が継続して所定の範囲内にないときレゾルバ30の異常を暫定的に確定する。この状態において、判定部68は、レゾルバ30が暫定的に正常であるとき、モータ制御部67と協働してモータを強制的に回転させ、計算された回転角がロータ31のステータ32に対する0〜2πに渡る回転を表したとき正常に復帰したと判定する。
(もっと読む)
故障診断装置、回転角度検出装置および故障診断方法
【課題】故障検出を、故障検出専用の回路などを別に設けることなく行うことができる技術を提供する。
【解決手段】第2の歯車の回転角度を検出する第1の回転角度センサと、第3の歯車の回転角度を検出する第2の回転角度センサと、第1の回転角度センサが検出した第2の歯車の回転角度と第2の回転角度センサが検出した第3の歯車の回転角度との角度差に基づいて第2の回転軸の回転角度を演算する演算手段とを備える回転角度を検出する検出装置の故障を診断する故障診断装置であって、第1の回転角度センサが検出した第2の歯車の回転角度と第2の回転角度センサが検出した第3の歯車の回転角度とに基づいて、第2の歯車の回転角度と第3の歯車の回転角度との角度差が零となる交差角θKを算出し(S906)、交差角θKに基づいて故障を診断する(S907〜S910)。
(もっと読む)
回転軸用物理量測定装置
【課題】各種工作機械の主軸の如く、荷重を受けつつ高速で回転する回転軸に加わる荷重、或はこの回転軸の変位量等の物理量を、十分な信頼性を確保しつつ、精度良く測定できる装置を、低コストで実現する。
【解決手段】エンコーダ4aの被検出面に、(A)に示す様に、それぞれが傾斜方向が異なる1対ずつの凹溝18a、18bから成る複数の被検出用特性変化組み合わせ部17、17を、周方向に関して等間隔に形成する。前記被検出面に対向するセンサの出力信号は、(B)(C)に示す様に変化する。演算器は、この出力信号が1回変化する周期と2回変化する周期との比であるタイミング比に基づいて前記主軸等に関する物理量を求める。前記エンコーダ4aの変位に拘らず、このタイミング比の大小が、隣り合うタイミング比同士の間で常に逆転する様に、各部の寸法を規制する。
(もっと読む)
エンコーダ及びエンコーダのパターン検出方法
【課題】エンコーダにおいて、異常を含んだ回転情報を検出し、検出精度を維持する。
【解決手段】パターンを有し、回転軸40を中心として回転する回転部材Rと、該パターンを検出するパターン検出部32と、該パターン検出部32と所定角度ずれた位置に配置される該パターンを検出する第2パターン検出部33と、該パターン検出部32又は該第2パターン検出部33における位相差に基づいて検出異常の有無を判断する制御部とを備える。
(もっと読む)
転がり軸受ユニットの物理量測定装置
【課題】システム異常の診断を、煩雑な演算処理を要する事なく、的確に行える構造を実現する。
【解決手段】物理量測定装置に、異常診断機能を付加する。この異常診断機能は、物理量演算に用いる1対のセンサのパルス信号A、Bに関して、これら両信号A、Bの立下りエッジが演算器に交互に入力されると言う<条件1>と、これら両パルス信号A、Bの相対的な位相変化が予め設定しておいた所定範囲内に収まっていると言う<条件2>とのうち、少なくとも何れか一方の条件を逸脱した場合に、システム異常が発生したと診断する機能である。この様な構成を採用する事により、上記課題を解決する。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】故障などにより異常となった出力信号を特定可能な回転角検出装置を提供する。
【解決手段】ブリッジ回路11、12は、被検出部87の回転に応じて変化する回転磁界によりインピーダンスが変化するセンサ素子21〜28により構成されるハーフブリッジ14〜17を有する。信号取得手段は、ハーフブリッジ14〜17の中点31〜34から出力される出力信号をハーフブリッジ14〜17ごとに取得する。回転角算出手段は、信号取得手段により取得された出力信号に基づき、被検出の回転角度θを算出する。異常特定手段は、信号取得手段によって取得される少なくとも4つの出力信号に基づく値である演算値が所定の範囲から外れた場合、当該演算値に対応する出力信号を異常出力信号として特定する。これにより、故障などによりどの出力信号が異常となったかを特定することができる。
(もっと読む)
回転角度センサ及びそれを用いた振幅算出方法
【課題】磁気センサが検出した2次元アナログ信号Vx,Vyからその角度成分θを検出する回転角度センサにおいて、安価で簡便な信号振幅の量子化を提供すること。
【解決手段】加算部の出力はVrot、Vfbxの2つに分岐している。そして、Vfbxが、X軸信号S/H部の入力へフィードバックされている。X軸信号S/H部への入力は、VxとVfbx の2つあり、Y軸信号S/H部への入力は、Vyに加えて基準電圧Vmdを含む2つとなっている。また、各軸信号S/H部には、角度算出動作時と振幅算出動作時において入力を切り替える切替信号が信号制御部より入力されている。Vrotは、角度算出時にはVrot= Vy’、振幅算出時にはVrot= Vx’である。
(もっと読む)
1 - 20 / 62
[ Back to top ]