
Fターム[2F077QQ06]の内容
感知要素の出力の伝達及び変換 (32,270) | スケール(パルス)の読取 (1,628) | スケール又はパルス発生部材を用いるもの (1,314) | 検出器又は検出素子の配置又は配列 (1,104) | 4相信号を出力するもの (67)
Fターム[2F077QQ06]に分類される特許
1 - 20 / 67
回転角信号断線検出方法及び装置
多回転アブソリュート回転角検出装置及びアブソリュート回転角を検出する方法
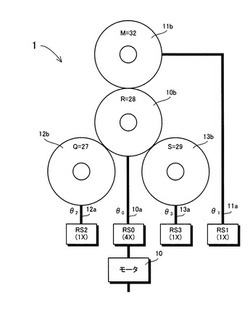
【課題】主軸の回転角度検出方法で、広い多回転検出範囲を得られ、かつ、高い検出精度を達成することのできるアブソリュート回転角検出方法と、多回転アブソリュート回転角検出装置を提供する。
【解決手段】本検出装置は、主軸ギヤ10bと歯車接合した第1〜第3副軸ギヤを具備する歯車機構1からなり、主軸ギヤと第1副軸ギヤの歯数差は、2又はそれを越える整数aであり、また主軸ギヤと第2副軸ギヤの歯数差は、1であり、第1軸の歯数は主軸に対する歯数差と主軸検出器の軸倍角の積の整数倍の関係を有する。各軸の回転角を角度検出器RS0〜RS3で検出する。主軸の回転角度と、主軸と第1〜第3副軸との間の回転角度の差を表す周期信号値をそれぞれ生成し、各周期信号値から求められた第1〜第3副軸の相対回転数の組み合わせに基づいて主軸の回転数を求める。主軸の回転数に回転角度を加えて多回転アブソリュート回転角を得ることができる。
(もっと読む)
角度を測定するための装置及び方法

【課題】改良された精度を有するアブソリュート角度エンコーダを提供する。
【解決手段】制御ユニット40が、処理ユニット41を有し、走査ユニット30−33の角度値が、少なくとも1つのインターフェース45−48を通じてこの処理ユニット41によって要求可能であり、かつ補正された1つの角度値に処理可能であり、この補正された角度値が、機器インターフェース42を通じてシーケンス制御回路100に対して伝送可能である。
(もっと読む)
目盛誤差算出装置、目盛誤差校正装置、及び目盛誤差算出方法
【課題】検出器の数を最小限にとどめながら、精度の高い目盛誤差を算出できる目盛誤差算出装置を提供する。
【解決手段】目盛誤差算出装置4は、回転軸22に支持された目盛盤2、及び目盛盤2に配設された4つの検出器3とを備えた目盛誤差校正装置1に用いられる。この目盛誤差算出装置4は、4つの検出器3で検出された各検出値に所定の係数をそれぞれ掛けて線形和を演算する検出値合成手段41と、検出値合成手段41にて演算された線形和のフーリエ成分に基づいて、目盛誤差のフーリエ成分を同定するフーリエ成分同定手段42とを備える。
(もっと読む)
演算装置、相対移動量測定装置、および、演算方法
【課題】位相の異なる1対の入力信号から出力を得る演算においては、arctan等の複雑な演算が必要となり、演算回路の負荷が大きくなってしまう。また、演算回路の負荷を軽減するためにルックアップテーブルを参照して出力を得る場合、必要なメモリが大きくなってしまう。
【解決手段】位相の異なる1対の入力信号IN1、入力信号IN2に対して、関数Fを用いて、入力値XをX=F(IN1、IN2)と定義する。入力値Xと出力値Yの関係を慨ね線形となるように関数Fを定義することにより、複雑な演算を使用することなく入力信号から予想される出力値を得ることが可能となる。ルックアップテーブルを参照する場合は、出力値と予想される出力値との差分のみをテーブル化しておくことにより、メモリを削減可能となる。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジから出力される出力信号を取得し、位相ずれαを補正するための位相補正値φを出力信号の組合せ毎に算出し、メモリ部52に記憶する。制御部51は、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
レゾルバ
【課題】出力信号の位相変化の空間周期を細分化して内挿できる、比較的簡単な構成のレゾルバを提供することを目的とする。
【解決手段】モータの回転絶対角を検出するレゾルバにおいて、前記モータの回転軸を中心としたリング状に形成され、先端にはそれぞれ歯が設けられた複数の突極を有するステータと、前記ステータに対向するとともに前記回転軸から偏心したリング状に形成され、n個(nは2以上の整数)の歯を有するロータと、検出信号の信号振幅および位相に基づいて前記モータの絶対回転位置を算出するとともに前記検出信号のリサージュ波形の楕円特徴値を算出して楕円補正を行う演算手段、を備えたことを特徴とするもの。
(もっと読む)
回転角度計測装置
【課題】回路コストを低減するため差動増幅回路やアナログ・デジタル変換回路が必要のない回路構成を有する回転角度計測装置を提供する。
【解決手段】回転軸と同期して回転する磁界発生手段が発生する磁界方向を少なくとも2以上の位相の異なる電気信号として出力するセンサ素子部211,212,221,222,231,232,241,242を有する回転角度センサ2と、センサ素子部を駆動させる周期波形を回転角度センサに出力する信号発生回路35と、センサ素子部から得られた出力が入力されるコンパレータ31,32,33,34と、コンパレータからの出力が入力される演算回路40と、を有し、演算回路は、コンパレータから出力されるパルス波形をデジタル値として取り込むパルス入力端子を有し、パルス入力端子で取り込まれた値に基づき回転軸の回転角度と等価である磁界方向を演算し出力する構成とした。
(もっと読む)
位置検出装置
【課題】シンプルな構成で小型化が容易な位置検出装置を実現する。
【解決手段】磁気レゾルバの検出信号をもとにモータの回転位置を検出する位置検出装置において、
前記モータの回転中心軸を中心とした円環状に配置され、それぞれに回転位置の検出コイルが巻回された複数の歯が形成されたレゾルバステータと、
このレゾルバステータに対向するとともに前記回転中心軸から偏心した円環状に配置されたn個(nは2以上の整数)の歯を有するレゾルバロータと、
前記検出信号の信号振幅および位相に基づいて前記モータの絶対回転位置を算出する演算部と、
を備える。
(もっと読む)
ロータリエンコーダ
【課題】磁気スケールと磁気センサ基板に位置ずれが発生した場合でも、磁気スケールの回転移動を精度良く検出できるロータリエンコーダを提供すること。
【解決手段】ロータリエンコーダ1は磁気センサ基板32上にA相を検出するための+a相、−a相の磁気抵抗パターンSIN+、SIN−、並びに、B相を検出するための+b相、−b相の磁気抵抗パターンCOS+、COS−を備える。磁気抵抗パターンSIN+、COS+は積層された第1積層磁気抵抗パターン351として形成され、磁気抵抗パターンSIN−、COS−は積層された第2積層磁気抵抗パターン352として形成され、磁気抵抗パターンSIN+、COS+は、+a相と+b相が最小位相差となる最小機械角度ずれた位置に配置され、磁気抵抗パターンSIN−、COS−は、−a相と−b相が最小位相差となる最小機械角度ずれた位置に配置される。
(もっと読む)
インクリメンタル位置測定機構の位置信号を監視するための監視ユニットおよび方法
【課題】インクリメンタル位置測定機構の位置信号を監視するための監視ユニットおよび方法を提供する。
【解決手段】監視ユニット200において、走査ユニット16によるインクリメンタル目盛格子トラック14の走査から得られ、互いに位相がずれている少なくとも2つの位置信号P0、P90、P180、P270が入力される。監視ユニット200は、様々な位置信号P0、P90、P180、P270から、位置に応じた少なくとも2つの状態データワードZ1、Z2、Z3、Z4を生成することができる信号結合ユニット210と、状態データワードZ1、Z2、Z3、Z4が送信される評価ユニット220からなり、評価ユニット220では状態データワードZ1、Z2、Z3、Z4の比較によって無効の状態を確定することができ、無効の状態が確定された場合にエラー信号Fを生成することができる。
(もっと読む)
ロータリエンコーダ
【課題】マグネットと感磁素子とからなる対を複数組、回転軸線方向の一方側に設けた場合でも高い分解能を得ることのできるロータリエンコーダを提供すること。
【解決手段】ロータリエンコーダ1において、回転体2には、N極とS極とが周方向において1極ずつ着磁された第1マグネット20と、第1マグネット20に対して径方向の外側で離間する位置でN極とS極とが周方向において交互に複数着磁された環状の第2マグネット30とが設けられ、固定体10には、第1マグネット20に対して回転軸線方向Lの一方側L1で対向する第1感磁素子40と、第2マグネット30に対して回転軸線方向Lの一方側L1で対向する第2感磁素子60とが設けられている。第1マグネット20と第2マグネット30の間には、これらのマグネットより回転軸線方向Lの一方側L1に向かって突出している環状のシールド部材70が設けられている。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】中間値固着異常が生じていることを適切に判断することができる回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10の制御部50は、ハーフブリッジ14〜17から出力される出力信号Vx1、Vx2、Vy1、Vy2を、ハーフブリッジ14〜17毎に取得する。制御部50は、取得された出力信号Vx1、Vx2、Vy1、Vy2に基づき、被検出部87の回転角度θを算出する。制御部50は、取得された出力信号Vx1、Vx2、Vy1、Vy2に基づいて算出される演算値C1またはC4に基づき、演算値C1またはC4の算出に用いた出力信号Vx1、Vx2、Vy1、Vy2に中間値固着異常が生じているか否かを判断する。これにより、中間値固着異常が生じているか否かを適切に判断することができる。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転に応じて変化する回転磁界を感知し被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジ14〜17から出力される出力信号をハーフブリッジ14〜17毎に取得し、位相ずれαを補正するための位相補正値φを算出する。メモリ部52は、位相補正値φを記憶する。制御部51は、位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子21〜28の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
磁気式アブソリュートエンコーダー
【課題】電磁ブレーキ付きモーターの回転位置を検出する磁気式アブソリュートエンコーダーの検出精度および信頼性を高めること。
【解決手段】磁気式アブソリュートエンコーダー20は2対のホール素子31〜34を備えた多極磁気エンコーダー21と2対のホール素子41〜44を備えた2極磁気エンコーダー22を備え、電磁ブレーキ9に隣接配置されている。各ホール素子31〜34の検出信号を合成することにより2極磁気エンコーダー22および電磁ブレーキ9の洩れ磁束によるノイズを除去し、ホール素子41〜44の検出信号を合成して電磁ブレーキ9の洩れ磁束によるノイズを除去して検出精度を確保している。多極および2極の磁気エンコーダーの検出信号から算出したモーター回転軸の回転位置を比較して異常の発生を監視し、検出動作の信頼性を確保している。
(もっと読む)
エンコーダ用信号処理回路
【課題】複数のエンコーダヘッドからそれぞれ出力されるエンコーダ信号を効率良く単一の処理回路で処理可能としたエンコーダ用信号処理回路を提供すること。
【解決手段】複数のエンコーダヘッド102a、102b、102cの何れかからのエンコーダ信号の処理中に、処理決定部202は、エンコーダヘッド102a、102b、102cに対する処理の内容とエンコーダヘッド102a、102b、102cからそれぞれ出力されるエンコーダ信号に対する処理の内容との少なくとも何れかを決定する。
(もっと読む)
回転位置センサ
【課題】回転角度の高い分解能を得られると同時に、小型化した回転位置センサを提供すること。
【解決手段】ロータ平板13の外周部につづら折り状の励磁コイル14が形成され、内周部にロータ側ロータリィトランス7が形成されていること、ステータ平板11の外周部に、つづら折り状のn個の検出コイル12A、12B、12C、12D(本実施の形態では、n=4)が形成され、内周部にステータ側ロータリィトランス8が形成されていること、4個の検出コイル12A、12B、12C、12Dが、重なり合わないように、円周方向に並べて配置されていること、4個の検出コイルは、各々、電気角で360度/8ずつずらして配置されていること、ステータ側ロータリィトランス8及びロータ側ロータリィトランス7を介して、励磁コイル14に高周波信号を励磁する高周波励磁回路22、21を有すること、を特徴とする。
(もっと読む)
磁気式回転角検出器
【課題】回転ドラムの回転角検出における精度が従来に比べて向上可能な磁気式回転角検出器を提供する。
【解決手段】外周面に交番着磁された磁石3を有する磁気ドラム1に対向して配置され、規定ピッチにて配列した複数の磁気センサ素子12〜15をセンサ面106に配列した磁気センサ10を有する磁気式回転角検出器において、上記規定ピッチは、第1磁石3a及び第2磁石3bの各磁力線が上記センサ面と接する第1接点108及び第2接点111間の距離を元に規定する。
(もっと読む)
磁気式エンコーダ
【課題】磁気検出素子からの検出信号にバラツキが含まれる場合でも、検出精度を向上できる。
【解決手段】磁石を有する回転子と、磁石の近傍に配置され、変調された電圧又は変調された電流が給電される複数の磁気検出素子(1から4)と、磁気検出素子(1から4)によって検出された検出信号に基づいて合成信号を生成する合成部(45A)と、を備えることを特徴とする。
(もっと読む)
検出システム、制御システム、画像形成システム及び制御方法
【課題】高精度な位置制御及び速度制御を実現可能とする。
【解決手段】エンコーダ装置40から出力される正弦波のアナログA相及びB相信号を、信号処理回路50で次のように変換する。即ち、信号処理回路50では、アナログA相及びB相信号をディジタル化して無逓倍のディジタルA相及びB相信号を生成すると共に、アナログA相及びB相信号を4倍に逓倍且つディジタル化して、ディジタル逓倍A相信号及びディジタル逓倍B相信号を生成する。更には、ディジタルA相及びB相信号の排他的論理和(XOR)信号を、ディジタルZ相信号として生成する。位置検出部61は、ディジタル逓倍A相信号及びディジタル逓倍B相信号に基づき、対象物の位置を検出する。一方、速度検出部631,632,633は、ディジタルA相信号、又は、ディジタルZ相信号、又は、ディジタルA相及びB相信号の両者に基づき、対象物の速度を検出する。
(もっと読む)
1 - 20 / 67
[ Back to top ]