
Fターム[2F077TT72]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | カウンタを用いる信号処理 (278) | アップ・ダウンカウンタ (77)
Fターム[2F077TT72]の下位に属するFターム
アップ/ダウンの切換え端子を持つもの (3)
アップ入力端子とダウン入力端子を持つもの
Fターム[2F077TT72]に分類される特許
1 - 20 / 74
スロットルバルブ用回転角度検出装置
【課題】径時的に信頼性が低下することを抑制することができると共に、検出開始時の実際の回転角度と演算した回転角度との誤差を小さくすることができるスロットルバルブ用回転角度検出装置を提供する。
【解決手段】第1信号および第2信号を用いて磁気発生部20の回転角度を演算し、磁気発生部20の実際の回転角度θと演算により求めた回転角度φとの偏差が所定値に収束するようにフィードバック制御を行う角度演算部60と、角度演算部60が演算した回転角度φに対応する信号を出力する出力部70と、を備える。そして、角度演算部60は、検出開始時の演算した回転角度φとしてスロットルバルブ10が全閉状態であるときの角度を用いるものとする。
(もっと読む)
ブラシレスDCモータの回転子位置検出方法とその装置

【課題】 3つのホールセンサの信号出力とパルス交番信号の、合計4つの信号の値から、2相エンコーダの出力に相当する信号を生成することによって、モータ回転子の回転方向を判別することができるブラシレスDCモータの回転子位置検出方法とその装置を提供する。
【解決手段】 3つのホールセンサ2U,2V,2W信号の現在値と、その1つ前の値とから、前記回転子の回転方向を判別し、前記3つのホールセンサ2U,2V,2Wのうち、いずれか1つの立ち上がりエッジまたは、立ち下がりエッジを基準位置とし、かつ、この基準位置として立ち上がりエッジを選択するか、あるいは、立ち下がりエッジを選択するかは、前記回転子の回転方向によって決定して、前記基準位置を通過する度に交番する交番信号を生成し、前記3つのホールセンサ2U,2V,2Wの信号と、前記交番信号とから、2相エンコーダ出力相当のパルス信号を生成し、このパルス信号によって前記回転子位置を検出する方法。
(もっと読む)
位置検出装置、回転式アクチュエータ、および、それを用いたシフトバイワイヤシステム
【課題】パルス信号の出力に関する異常が生じても可動部材の位置の検出を継続可能な位置検出装置を提供する。
【解決手段】エンコーダ40は、モータ軸21が回転するのに応じ、所定の位相差を有する3相のパルス信号を出力する。ECU3は、カウント値を保持し、エンコーダ40が出力する3相のパルス信号のすべてが正常のとき出現する各パルス信号の組み合わせパターンである正常時パターン、および、3相のパルス信号のうち1相のパルス信号が異常のときのみ出現する各パルス信号の組み合わせパターンである異常時パターンに基づき、前記カウント値に対し第1所定値「1」、または、第2所定値「2」を加算または減算する。ECU3は、前記カウント値に基づき、モータ軸21の回転位置を検出する。
(もっと読む)
エンコーダ信号処理回路
【課題】エンコーダ停止時の誤カウントなどを防止可能なエンコーダ信号処理回路を提供する。
【解決手段】エンコーダ信号のA相パルスとB相パルスからクロック同期のA相パルスとB相パルスを生成する回路と、クロック同期のA相パルスとB相パルスから4逓倍パルスを生成する4逓倍パルス生成回路と、クロック同期のA相パルスとB相パルスが交互に入力されているか否かに基づきエンコーダの停止時期を示す信号を作成する交互チェック回路と、前記エンコーダの停止時期以外に前記4逓倍パルスからノイズ除去済み4逓倍パルス信号を発生する回路とを有するエンコーダ信号処理回路。
(もっと読む)
位置検出装置
【課題】リニアモータの二次側の界磁を利用して移動体の位置を検出する位置検出装置は、精密機器の移動装置に適用し得る検出精度を有していない。
【解決手段】主位置演算器20は現在位置の上位桁である主位置データを出力し、従位置演算器60は現在位置の下位桁である従位置データを出力する。主位置演算器20は、磁気センサ10の検出信号から2相の矩形波信号を得て計数信号を発生し、計数信号を累積加減算して主演算データを得る。デジタルフィルタ40は、移動平均によって検出信号の振動成分を濾波する。従位置演算器60は、検出信号の逆正接を求めて従位置データを得る。位置演算器70は、主位置データと従位置データを加算して位置データを生成する。ピッチ補正器90は、移動方向に合わせて位置データをピッチ補正値で補正して移動制御装置4に出力する。
(もっと読む)
回転センサ
【課題】構造誤差等に起因する測定誤差の発生を抑制して相対回転角度をより正確に演算し得る回転センサを提供する。
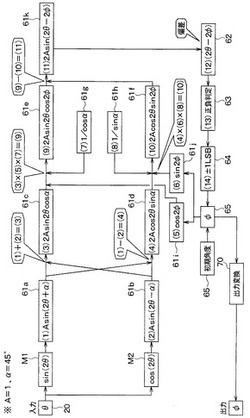
【解決手段】相対回転角度θが基準角度となるように相対回転させた回転子4について、正弦波相コイル3bからの正弦波信号に基づいて、基準角度からのずれが角度αとして予め測定され、余弦波相コイル3cからの余弦波信号に基づいて、基準角度からのずれが角度βとして予め測定される。そして、角度演算部60により、正弦波相コイル3bから出力される正弦波信号sin(θ+α)にcos(φ+β)を乗算したものから、余弦波相コイル3cから出力される余弦波信号cos(θ+β)にsin(φ+α)を乗算したものを減算して求められる(sinαsinβ+cosαcosβ)×sin(θ−φ)について、その変数部分である(θ−φ)が、上記所定値になるようにフィードバック制御を行って、相対回転角度θが演算される。
(もっと読む)
回転センサ
【課題】構造誤差等に起因する位相ずれを反映して相対回転角度をより正確に演算し得る回転センサを提供する。
【解決手段】回転センサ1において、角度演算部60は、複数の磁電変換素子から出力されるsinNθ信号及びcosNθ信号に対して予め設定されたずれ量αが反映されたsin(Nθ+α)信号及びsin(Nθ−α)信号を生成しており、sin(Nθ+α)信号及びsin(Nθ−α)信号に対して、ずれ量αに応じた補正値を用いて補正を行うことでsin(Nθ−Nφ)信号を生成し、且つsin(Nθ−Nφ)信号に基づく偏差(Nθ−Nφ)が所定値になるようにフィードバック制御を行って相対回転角度θを演算している。
(もっと読む)
回転検出装置
【課題】第1センサ部の出力信号が所定レベルから変化しなくなる異常が生じている場合であれ、回転体の回転角度の変化量を的確に把握することができる。
【解決手段】クランクポジションセンサ42はクランクシャフト31が所定角度回転する毎にパルス状の信号を出力するメインセンサ61、サブセンサ62を有し、これらは互いに位相のずれた信号を出力する。サブ信号がハイレベルであり且つメイン信号が変化したとの条件が成立したときにこのときのメイン信号の変化方向に応じて異なるパルス幅のクランク信号を出力する。ECU41は、サブ信号がハイレベルから変化しなくなる異常が生じているか否かを判定し、同異常が生じている旨判定された場合にクランク信号のパルス幅と機関回転速度と上記異常時に出力されるクランク信号数との対応関係に基づき当該出力されるクランク信号数を正常時におけるクランク信号数に換算する。
(もっと読む)
リニアエンコーダとアクチュエータ
【課題】 Z相信号をより安定させ、確実に原点出しを行うことができ、信頼性が高く、コンパクト、且つ、低コストが容易になるように工夫したリニアエンコーダとそのようなリニアエンコーダを使用したアクチュエータを提供することである。
【解決手段】 原点用スケールパターンの符号系列が狭帯域化のための変調が掛かったパターンであることを特徴とするものであり、例えば、低コスト化容易なPETフィルム基材を用い、印刷により製作した反射面の平滑性が若干劣るリニアスケールを用いても、狭帯域化変調を施したスケールパターンを用いることにより、本来孤立ビットとなるZ相原点信号でも、信号振幅を確保することができる。又、差動検出により信号出力の増大やスレショルドレベルの安定化を図ることができる。
(もっと読む)
エンコーダ
【課題】符号板の高速移動時においても位置検出の信頼性の低下を低減できるエンコーダを提供する。
【解決手段】エンコーダ(100)は、位置情報を示すパターンを有する符号板(10)と、位置情報を示すパターンを検出する検出部(20)と、位置情報に基づいて、第1の処理が行われる第1経路と、位置情報に基づいて、第2の処理が行われる第2経路と、第1の処理の第1処理結果と第2の処理の第2処理結果とに基づいて第3の処理をする処理部(39又は41)と、第1経路から処理部への第1処理結果の出力タイミングと第2経路から処理部への第2処理結果の出力タイミングとを同期させるように、第1経路と第2経路とにおける出力タイミングの遅延時間を調整する遅延時間調整部(60)とを備える。
(もっと読む)
センサ電圧の処理回路
【課題】センサ電圧処理回路のオフセット電圧と増幅率を短時間で調整する。
【解決手段】
センサ電圧処理回路100は、オフセット電圧を基準にしてセンサ電圧を増幅した電圧を出力するともにオフセット電圧と増幅率が調整可能な増幅回路120と、増幅回路120の出力電圧の極値を保存する極値保存回路160と、極値保存回路が保存している極値に基づいて増幅回路の出力電圧を2値化する2値化回路200と、調整回路400を備えている。調整回路400は初期化処理時に、1)増幅率を最大値に設定し、2)増幅回路の出力電圧が増幅回路の動作電圧範囲の中間帯に入るようなオフセット電圧に調整し、3)極値を中間帯内の電圧とし、4)増幅回路の出力電圧の極値からの変化幅が所定幅を超えた時に増幅率を低減するとともに極値を補正し、5)増幅回路の出力電圧が回転体の回転運動に固有な変化パターンを示すまで前記(4)の処理を繰り返す。
(もっと読む)
回転センサ
【課題】 回転角度の検出精度を高めながら小型化することができる回転センサを実現する。
【解決手段】 磁気抵抗素子R1〜R8が各磁気抵抗素子の出力信号間に位相差が出るように配置された磁気抵抗素子領域E1と、ホール素子H1,H2が各ホール素子の出力信号間に位相差が出るように配置されたホール素子領域E2とを有し、かつ、磁気抵抗素子領域およびホール素子領域の少なくとも一部同士が重ねられたセンサチップ5と、各ホール素子の各出力レベルと閾値レベルとの比較結果を出す比較部53と、各磁気抵抗素子の各出力信号を用いて相対回転角度θに対応する演算角度φを演算する角度演算部60と、その演算された角度と閾値角度とを比較し、その比較結果と比較部53の比較結果とを用い、相対回転角度に対応する信号を出力する出力部70とを備える。
(もっと読む)
回転センサ
【課題】 磁気発生部の相対回転角度の演算時間を短縮することができる回転センサを実現する。
【解決手段】角度演算部60はAMRセンサM1,M2から出力される信号を用い永久磁石2に対する相対回転角度θと演算により求めた演算角度φとの偏差が所定値に収束するようにフィードバック制御を行って相対回転角度θを演算する。初期値決定部53はホール素子H1,H2から出力された各検出信号の各信号レベルと閾値との各比較結果を用い相対回転角度θの初期値θ0が含まれる角度範囲を判定し、その判定した角度範囲の中で発生し得る相対回転角度の初期値と前記演算角度の初期値との差の絶対値が90°未満となるように演算角度の初期値を決定する。初期値決定部は永久磁石2が相対回転を開始する前にのみ演算角度φの初期値φ0を決定し角度演算部60はその決定された演算角度φの初期値φ0を用いてフィードバック制御を開始し、相対回転角度θを演算する。
(もっと読む)
エンコーダ装置
【課題】電気的ノイズに強い誤動作検出を行うことを可能にするエンコーダ装置を提供することを課題としている。
【解決手段】エンコーダ装置は、符号板と、符号板の相対位置を検出する相対位置検出部と、第1絶対位置符号を生成するパターン生成部と、符号板の絶対位置を示す第2絶対位置符号を検出する絶対位置検出部と、第1絶対位置符号から同一の論理状態を示す符号の位置から少なくとも2箇所の同一符号位置を選択する同一符号選択部と、第2絶対位置符号から同一符号位置に対応する位置の符号を判定する符号判定部と、同一符号位置によって示される第1絶対位置符号と、符号判定部が判定した符号とが同じ論理状態であるか否かを判定する判定部と、相対位置検出部又は絶対位置検出部において発生した検出異常の有無を判定する異常判定部とを備える。
(もっと読む)
エンコーダ装置
【課題】符号板の回転数が高くなった場合でも適切に誤動作を検出することができるエンコーダ装置を提供することを目的としている。
【解決手段】最小識別幅λの第1アブソリュートパターン及び該第1アブソリュートパターンとは異なる最小識別幅の第2アブソリュートパターンを有する符号板と、第1アブソリュートパターンに沿って配置された第1アブソリュートパターンの符号を検出する複数の検出素子を有する第1アブソリュートパターン検出部と、第2アブソリュートパターンに沿って配置された第2アブソリュートパターンの符号を検出する第2アブソリュートパターン検出部と、第1アブソリュートパターン検出部が検出した第1アブソリュートパターンの符号に基づき現在位置を算出する絶対位置デコード部と、少なくとも第2アブソリュートパターンの符号に基づき異常検出を行う異常検出部とを備える。
(もっと読む)
回転角検出装置
【課題】モータと一体化し、回転角を確実に検出することの可能な回転角検出装置を提供する。
【解決手段】ステータに相対回転可能に設けられたロータ20の第1極巻線21に第1コンデンサ41が並列に接続され、第2極巻線22に第1コンデンサ41よりも静電容量の小さい第2コンデンサ42が並列に接続される。ロータ20の巻線に整流子30を通して通電する直流電源50に重畳して交流電源53が設けられる。ブラシ51、52の間に形成される回路のインピーダンスがロータ20の回転によって3つの状態に変化するので、電流検出手段54は3つの振幅状態の電流を検出する。信号検出部55と回転角検出部56は、電流振幅の状態遷移する順序により、ロータ20の回転方向を検出し、状態遷移回数のカウント値を回転方向に応じて増減することによりロータまたは被駆動体の回転角度を算出する。
(もっと読む)
回転角検出装置及び電動パワーステアリング装置
【課題】高い検出精度を有するとともに、構成簡素且つ省電力にて、連続的に検出対象の絶対角を検出することのできる回転角検出装置を提供すること。
【解決手段】ECU11(マイコン21)は、ステアリングセンサが出力する正弦信号S_sin及び余弦信号S_cosに基づいて、絶対角である操舵角θsを検出する。また、ECU11は、正弦信号S_sin及び余弦信号S_cosに基づいて、所定の回転角(電気角)に対応したエッジを有するとともにそれぞれの各エッジに対応する所定の回転角が互いに重複することなく且つ均等間隔となるように設定された三相のパルス信号P1,P2,P3を生成する三相パルス生成器30を備える。そして、マイコン21は、これらの各パルス信号P1,P2,P3に基づいて操舵角(第2操舵角θs´)を演算する第2の回転角検出手段としての機能を備える。
(もっと読む)
マルチ・ターン回転伝送器
【課題】マルチ・ターン・ユニットの状態を確実に特定する。
【解決手段】マルチ・ターン回転伝送器は、回転軸Wの1回転内の角度を計測するシングル・ターン・ユニット10と、回転数を測定する2つのマルチ・ターン・ユニット20、30を備える。シングル・ターン・ユニットは、コード支持体11と、シングル・ターン位置信号SPをシングル・ターン符号語SCへ処理するためのシングル・ターン評価ユニット14を含む。2つのマルチ・ターン・ユニットはそれぞれ、マルチ・ターン・コード支持体21、31.1(及び31.2)と、生成されたマルチ・ターン位置信号MP1、MP2を、入力軸Wの回転数を表すマルチ・ターン符号語MC1、MC2へ変換するためのマルチ・ターン評価ユニット24、34を含む。2つの独立生成のマルチ・ターン符号語により、マルチ・ターン・ユニットの機能を特定する。
(もっと読む)
エンコーダ信号処理回路
【課題】エンコーダ停止時の誤カウントなどを防止可能なエンコーダ信号処理回路を提供する。
【解決手段】A相およびB相のパルスをそれぞれ入力信号とする第1および第2のダブルラッチと、2つのダブルラッチの出力信号位相ずれからエンコーダの方向弁別する方向弁別回路と、2つのダブルラッチの出力信号から4逓倍パルス生成する4逓倍パルス生成回路と、撮像手段へ水平同期信号を供給する水平同期信号生成回路と、弁別された方向からアップまたはダウンカウントするアップダウンカウンタと、撮像開始信号を生成する撮像開始信号生成回路と、水平同期信号生成回路の出力信号が入力される第1シングルラッチと、撮像開始信号生成回路および方向弁別回路の出力信号が入力される第2シングルラッチと、4逓倍パルス間のシステムクロックパルス数を監視するエンコーダ速度監視回路と、を有するエンコーダ信号処理回路。
(もっと読む)
エンコーダ出力信号補正装置及び方法
【課題】2相正弦波状信号から構成される多重のリサージュ信号に対応して、その2相正弦波状信号に含まれるオフセット、振幅誤差、位相誤差、及び3次高調波成分を除去可能なエンコーダ出力信号補正装置及び方法を提供する。
【解決手段】エンコーダ出力信号補正装置1は、2相正弦波状信号の周期を特定するUP/DNカウンタ60と、特定された各周期情報の値毎に、2相正弦波状信号によって形成されるリサージュ信号に含まれる理想的リサージュ信号からの誤差を検出する検出部31、41と、特定された各周期情報の値毎に、検出部31、41で検出された誤差に基づく補正係数で2相正弦波状信号を補正する補正部30、40とを備える。
(もっと読む)
1 - 20 / 74
[ Back to top ]