
Fターム[2F105AA06]の内容
Fターム[2F105AA06]に分類される特許
201 - 220 / 236
伝送モードRFOGおよびRFOGで回転を検出する方法
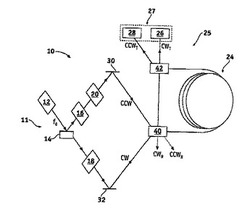
【課題】共振器の望ましくない偏光状態に整合された入力光、または共振器の望ましくない空間モードに整合された入力光からの干渉を最小限に抑えることにより、より正確な回転速度測定値を有する光ファイバジャイロを提供する。
【解決手段】光ビームを各逆伝播方向に循環させるリング共振器は、中空コアおよび第1および第2の端部を有する光ファイバコイル24と、入力光ビームを受け、入力光ビームの一部をリング共振器の逆伝播方向に向けるように構成された第1の光学素子40と、第1の光学素子と共に循環光ビームの大部分をリング共振器の逆伝播方向に向け、循環光ビームの伝送モード成分を端部の一方で導出するように構成された第2の光学素子42とを備える。入力光ビームの部分は、第1および第2の端部の一方に進入し、循環光ビームは入力光ビームに基づく。伝送モード成分は、リング共振器の逆伝播方向の共振ピークを示す。
(もっと読む)
力学量センサ

【課題】 外来ノイズの影響を低減させることによりセンサの検出精度の向上を図る。
【解決手段】 物体に働く加速度を、可撓基板10で支持された錘部30の姿勢変化に基づいて検出する。可撓基板10は、フレーム20に固定され、その中心部に錘部30がハンダ付けにより固定されている。錘部30に加速度などの力が作用すると、錘部30の姿勢が変化し、これに伴い可撓基板10も変形する。この錘部30の姿勢変化や可撓基板10の変形を、梁部14に設けられた検出素子である圧電抵抗素子の回路定数の変化量に基づいて検出する。検出素子により検出された信号の処理を行う信号処理回路をICチップに形成し、このICチップによって錘部30を構成する。錘部30をICチップで構成することにより、信号処理回路と検出素子との距離を短く構成することができ、外来ノイズの影響を低減させることができる。
(もっと読む)
ジャイロセンサの補正方法及び補正装置
【課題】ジャイロセンサにおいて、より適切な補正方法を実現する。
【解決手段】(a)ジャイロセンサが装着された移動体が回転する状態で、測定部100が、移動体の角速度及びジャイロセンサの平均出力値を測定するステップと、(b)演算部200が、測定された角速度及び平均出力値を利用してジャイロセンサの特性曲線についての情報を算出し、保存部300が、その算出された情報を保存するステップと、(c)補正部400が、特性曲線についての情報を利用してジャイロセンサを補正するステップと、を含むジャイロセンサの補正方法。
(もっと読む)
移動体の高精度姿勢検出装置
【課題】 移動体に搭載した慣性センサ出力の中から移動体の姿勢演算に不要な慣性成分を除去して、移動体の姿勢検出を精度良く検出することのできる移動体の高精度姿勢検出装置を提供する。
【解決手段】 移動体の高精度姿勢検出装置は、移動体に、当該移動体の慣性を検出する慣性検出手段と、当該移動体の動作を生成する動作生成手段と、姿勢演算を行う演算処理手段を備え、演算処理手段により慣性検出手段の出力と動作生成手段の出力に基づき移動体の姿勢を高精度に検出する。
(もっと読む)
振動体及びそれを用いた振動ジャイロ
【課題】 環境破壊を防止でき、高感度で出力と感度の温度安定性が優れた振動体及び振動ジャイロを提供することである。
【解決手段】 本発明の振動体は、基部と、この基部から延出する少なくとも2本の腕部と、これらの腕部を屈曲振動させるために前記腕部の主面上または側面上に設けられた駆動用圧電振動素子及び駆動用電極と、前記駆動用圧電振動素子によって励振される前記屈曲振動の面内方向と直交する振動を検出する検出用圧電振動素子及び検出用電極と、を有する振動体であり、前記駆動用圧電振動素子及び前記検出用圧電振動素子は、結晶粒子が異方性を有するビスマス層状構造強誘電体であることを特徴とする。
(もっと読む)
発振回路及び角速度センサ
【課題】 振動子の特性のばらつきに幅広く対応する安定度にすぐれた発振回路を実現すると共に、この発振回路を用いた高精度の角速度センサを提供する。
【解決手段】 駆動電極3,4を有する水晶振動子2と、この水晶振動子2の駆動電極からの出力電流を交流電圧に変換する電流/電圧変換回路7と、この電流/電圧変換回路7からの交流信号を増幅する利得可変増幅器10と、電流/電圧変換回路7からの交流信号を増幅する利得固定増幅器11と、水晶振動子からの出力電流を一定に制御するAGC回路9とを有し、利得固定増幅器11は、少なくとも2つの利得を切り替える切替回路を設けた発振回路の構成とした。これにより、安定した発振回路を実現出来る。
(もっと読む)
光ジャイロ較正装置、光ジャイロを搭載するロボット及び光ジャイロ較正プログラム
【課題】ジャイロを搭載するロボットにおいて、ロボットの位置及び方位の測定を容易にし、ノイズの影響を抑制してジャイロの較正を行うことを可能にすることである。
【解決手段】ジャイロを搭載するロボットにおいて較正を行うときは、目標壁面に対してロボットよりレーザービームを照射し、目標壁面上に占めるレーザーポイントの位置を測定してその状態の位置データを初期値として取得し(S10,S12)、較正が開始すること等を表示する(S14,S16)。そして較正期間をリセット(S18)して較正期間の計時処理を開始する。所定の較正期間の間は光ジャイロの検出値をサンプリングにより継続して取得する(S20)。取得中に外乱があると警報を出力し、較正をやり直す。較正期間中に外乱がなく満了すれば、較正期間内の検出値に基づき較正値が設定される(S26,S28)。
(もっと読む)
角速度センサの零点補正装置
【課題】角速度センサの零点を補正する。
【解決手段】ロボット等の運動体に角速度センサ10が設けられる。変化範囲設定器14は角速度の変化幅が所定値以下であるか否かで静止状態を判定し、静止判定器20は判定時間を超えて静止状態が継続しているか否かを判定する。総和平均器34は、静止状態と判定された期間のn個のデータのうち、終了タイミング直前のi個のデータを除いた(n−i)個のデータの総和平均を算出して零点オフセットとする。零点補正器36は、センサ出力を零点補正して出力器28に出力する。
(もっと読む)
センサユニット
【課題】加速度センサ及び角速度センサを高精度にかつ再現性よく位置決め固定できるセンサユニットを提供する。
【解決手段】センサユニット10は、基準ベース12を有する。基準ベース12の底面12A及び一側面12Bを基準面として用い、加速度センサブロック14及び角速度センサ取付支柱を基準ベース12上に設ける。X軸、Y軸、Z方向の加速度をそれぞれ検出する3個の加速度センサ16を加速度センサブロック14の各面に接着し、各軸回りの角速度を検出する3個の角速度センサ24を防振ゴムとしてのゴムブッシュ20を介して支柱にネジ22で締め付け固定する。
(もっと読む)
ジャイロを搭載するロボット、ジャイロ較正装置、プログラム及び方法
ジャイロを搭載するロボットにおいて較正を行うとき、目標壁面に対してロボットよりレーザービームを照射し、目標壁面上に占めるレーザーポイントの位置を測定する。その測定された位置を初期値として取得し(S10,S12)、較正が開始することを表示する(S14,S16)。そして較正期間をリセット(S18)して較正期間の計時処理を開始する。所定の較正期間の間はジャイロの検出値をサンプリングにより継続して取得する(S20)。取得中に外乱があると警報を出力し、較正をやり直す。較正期間中に外乱がなく満了すれば、較正期間内の検出値に基づき較正値が設定される(S26,S28)。  (もっと読む)
(もっと読む)
角速度センサ
【課題】 検出感度を向上させることの可能な角速度センサを提供すること。
【解決手段】 本発明は、第1のジンバル部(10)と、第1のジンバル部の相対する側面に設けられた第1のトーションバー(12)で第1のジンバル部と接続する第2のジンバル部(20)と、第2のジンバル部の相対する側面に設けられた第2のトーションバー(22)で第2のジンバル部と接続するフレーム部(30)と、第1のジンバル部と第2のジンバル部とを静電結合した第1の静電結合部(14)と、第2のジンバル部と前記フレーム部とを静電結合した第2の静電結合部(24)と、を有し、第1又は第2のジンバル部の第1又は第2のトーションバーの方向の最大幅が、第1又は第2のトーションバーの設けられた第1又は第2のジンバル部の側面間の幅より、広いことを特徴とする角速度センサである。
(もっと読む)
角速度センサの零点補正装置および補正方法
ロボット等の運動体に角速度センサ(10)が設けられる。第1設定器(14)は角速度の変化幅が所定幅以下であるか否かで静止状態を判定し、静止判定器(20)は判定時間を超えて静止状態が継続しているか否かを判定する。総和平均器(34)は、静止状態と判定された期間のn個のデータのうち、終了タイミング直前のi個のデータを除いた(n−i)個のデータの総和平均を算出して零点オフセットとする。零点補正器(36)は、出力値を零点補正して出力器28に出力する。 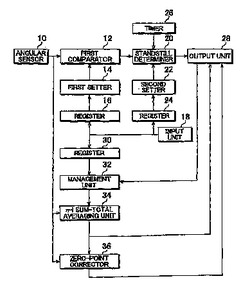 (もっと読む)
(もっと読む)
慣性センサー素子の実装方法及び慣性センサー素子
【課題】 本発明は、Z板の水晶板をエッチング加工して形成し、収納容器に実装した慣性センサー素子が、センサー素子と収納容器への実装の傾きあるいは、センサー素子を収納した容器とユーザ基板への実装時の傾きを防止するためのセンサ素子ーの実装改善を目的とする。
【解決手段】 課題を解決するために本発明は、音叉形状の水晶振動片の中心部を回転軸として、前記水晶振動片を励振することで前記回転軸の回転力の発生により発生するコリオリ力を検知することで角速度を得る慣性センサー素子を容器に収納する実装方法において、前記慣性センサー素子の主面の少なくとも一箇所にセグメントマークを形成し、前記収納容器に少なくとも一箇所にセグメントマークを形成し、両方のセグメントマークを合わせることにより、前記センサー素子の実装方向を決定することにより課題を解決する。
(もっと読む)
光ファイバジャイロの異常検出装置
光ファイバジャイロのCW信号、CCW信号の所定サンプリング期間におけるパルス数をサンプリング器で検出する。異常判定器は、パルス数がしきい値以上あれば正常と判定し、両パルス数ともしきい値より小さければ断線あるいは接続不良等の異常が生じていると判定し、出力器に出力する。異常判定器は、量子化ノイズの有無により異常を判定してもよい。  (もっと読む)
(もっと読む)
ジャイロセンサ
【課題】 感度に優れると共に、容易に形成できるジャイロセンサを形成すること。
【解決手段】 支持枠1と、支持枠1の内側に配置された基部2との間を第1乃至第4の梁3,4,5,6で連結する。第1の梁3と第2の梁4を、基部2を介して同一直線上に配置し、第3の梁5と第4の梁6を、基部2を介して同一直線上に配置する。また、第1の梁3と第3の梁5を平行に配置する。基部2を介して同一直線上に位置すると共に、基部2の側面から突出するように第1および第2の振動子支持軸8,9を形成する。第1振動子支持軸8の先端に第1振動子11を固定し、第2振動子支持軸9の先端に第2振動子12を固定する。基部2の表面上に基部2の変位の変位を検出する変位検出部13を形成する。
(もっと読む)
慣性センサー素子
【課題】 本発明は、水晶のZ板をエッチング加工して形成し、1軸方向だけのコリオリ力を検出する慣性センサー素子を機械的に接合することで、少なくとも2軸、3軸方向のコリオリ力を検出する角速度検出センサを実現することを目的とする。
【解決手段】 課題を解決するために本発明は、音叉形状の水晶振動片の中心部を回転軸として、前記水晶振動片を励振することで前記回転軸の回転力の発生によりコリオリ力を検知することで角速度を得る慣性センサー素子において、前記慣性センサー素子のひとつを少なくともX軸とY軸の2方向に配置し、前記素子の一部を接合した構造を有し、Z軸の方向にも配置することで、X軸とY軸と合わせて3方向のコリオリ力を検知した角速度を得ることができる慣性センサー素子である。そして各素子は、直接接合により機械的に一体化することで、検出方向成分の数により自由に素子を組み合わせることにより課題を解決する。
(もっと読む)
角速度センサ
【課題】 単純な構造で三次元の所定軸まわりの角速度を検出する。
【解決手段】 導電性材料からなる可撓基板570の周囲をセンサ筐体560に固定し、下面中央に振動子550を固着する。可撓基板570の上面には、圧電素子540を固着し、その上面に上部電極L1〜L4を形成する。上部電極L1〜L4と導電性可撓基板570との間に所定位相の交流信号を供給することにより、振動子550をX軸方向に振動させた状態にする。その状態において、振動子550に加わるZ軸方向のコリオリ力による振動子550のZ軸方向への変位を、圧電素子540の上面に形成された図示されていない別な上部電極と導電性可撓基板570との間に発生した電圧に基づいて検出し、検出した電圧をY軸まわりの角速度を示す値として出力する。
(もっと読む)
角速度センサ
【課題】 小型の角速度センサを提供する。
【解決手段】 角速度を検知する音叉型振動子10と、音叉型振動子10を実装するパッケージ30とを有し、音叉型振動子10をパッケージ30の対角線上に配置した構成とする。角速度センサはパッケージ30を保持する基板50を有し、音叉型振動子10が鉛直方向に対して所定角度傾くようにパッケージ30を基板50に取り付ける。音叉型振動子10をパッケージ30に固定するリードフレーム20を設け、リードフレーム20は断面がコの字形状の屈曲部を有し、屈曲部によって、パッケージ30とリードフレーム20との間に空間を形成する。
(もっと読む)
角速度センサ
【課題】 簡単な構造であるにもかかわらず高い検出精度を持つ生産性に優れた角速度センサを提供する。
【解決手段】 ベース13から延びる複数のアーム11、12を有する音叉型振動子10と、ベース13を支持する単一のリードフレーム20と、リードフレーム20を支持するパッケージ30とを有し、パッケージ30とリードフレーム20との間に空間31が形成されている。リードフレーム20は、断面がコの字状の屈曲部22を有し、屈曲部22はベース13を支持し、屈曲部22が空間31を形成する。または、リードフレーム20は、ベース13を支持する平坦部21を有し、リードフレーム20を支持するパッケージ30の面には凹部31が形成されており、凹部が空間31を形成する。
(もっと読む)
慣性センサー補正装置及び方法と、その方法を記録した記録媒体
【課題】慣性センサー補正装置及び方法とその方法を記録した記録媒体を提供する。
【解決手段】動く物体の角速度及び加速度を測定する(a)ステップと、測定された角速度のうち任意の軸に対する角速度が0になるゼロ角速度時間を抽出する(b)ステップと、測定された加速度から運動速度を計算し、計算された運動速度をゼロ角速度時間の区間別に補正する(c)ステップとを含む慣性センサー補正方法。
(もっと読む)
201 - 220 / 236
[ Back to top ]