
Fターム[2F112FA33]の内容
光学的距離測定 (16,745) | データ処理回路 (4,598) | 信号補正(輪郭強調) (190) | ノイズ除去 (49)
Fターム[2F112FA33]に分類される特許
1 - 20 / 49
距離指標情報推定装置及びそのプログラム
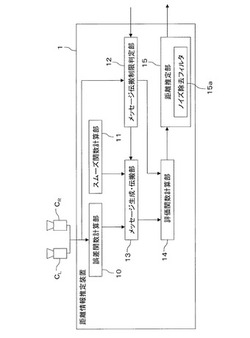
【課題】本発明は、精度が高い距離情報を生成できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、基準画像における隣接画素間の色情報の差分絶対値が色情報閾値Tc以下であるか否かによって、隣接画素間でメッセージを伝搬できるか否かを判定するメッセージ伝搬制限判定部12と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部13と、メッセージの評価関数を計算する評価関数計算部14と、評価関数が最小となる距離を、距離情報として推定する距離推定部15とを備える。
(もっと読む)
カメラシステム、衝突予測システム、駐車ガイドシステム

【課題】距離精度を向上できる。
【解決手段】正対する光の進行方向を一方光へ変える少なくとも二つの光学素子と、前記光学素子により進行方向を変えられた光を電気信号に変換する撮像素子と、を有する光学部と、少なくとも二つの前記光学部の撮像素子が変換した電気信号に基づいて距離情報を算出する距離算出部と、を備える。
(もっと読む)
画像処理装置および方法、プログラム
【課題】 撮像画像データ中に鏡面反射光の成分が含まれている場合であっても、被写体までの距離を高精度に推定することを目的とする。
【解決手段】 偏光面が角度が異なる偏光フィルタが装着された複数のカメラにより撮像された複数の偏光画像データに基づき、被写体の鏡面反射光の強度と偏光面の角度との少なくとも何れか一方を推定し、その結果に基づいて被写体までの距離を推定する。
(もっと読む)
距離測定装置
【課題】移動体と対象物との間の相対的な位置関係が変動した場合でも、高精度な距離の測定が可能となる距離測定装置を提供する。
【解決手段】投光部11より、上端部を有し、且つ、水平方向に広がる発光領域を有する第1投光パルスを照射する。そして、測定対象物31にて反射する領域光をカメラ12にて撮像し、この画像を同期検波して第1投光パルスの上端部に対応する上端エッジを検出する。また、第1投光パルスがオフとされているときに撮像される測定対象物の画像から該測定対象物31の形状エッジを検出し、形状エッジと上端エッジが一致する場合については、この上端エッジを除去し、両者が一致する場合の上端エッジを用いて三角測量の原理を用いて、測定対象物31までの距離を測定する。
(もっと読む)
撮像モジュール、撮像装置、画像処理装置及び画像処理方法。
【課題】 複数の光学ユニットを有する撮像モジュールにおいて鏡面反射による影響を抑制することを目的としている。
【解決手段】 複数の光学ユニットを有する撮像モジュールであって、複数の光学ユニットのうちの少なくとも一部の光学ユニットに対して偏光フィルタを備え、偏光フィルタを備える光学ユニットにより得られる画像データに基づいて、被写体までの距離情報を推定する。
(もっと読む)
光波距離計
【課題】発光量調節に機械的駆動を用いず、かつ光量調節作業を繰り返すことなく受光光量が最適に調整される光波距離計を提供する。
【解決手段】所定の固定抵抗値を持つ抵抗器を抵抗値大から小にかけて複数設けて、演算処理部において、受光信号振幅を見ながらそのうちの一を光送出手段に選択的に負荷する構成とした。演算処理部において、信号変換手段に入力される受光信号振幅が、最大入力値以上と判定された場合には、最大入力値未満となるまで現段階の発光量より小さい発光量に下げるように信号選択を繰り返し、最大入力値以上と判定された場合には、最大入力値を超えない最大の発光量となるまで現発光量より大きい発光量に上げるように信号選択を繰り返すことで、断続的な複数パターンの発光量の中から最適な発光量が決定され、その信号選択回数は最大でも用意した抵抗器数と同じ回数で済み、光量調節作業が大幅に早くなる。
(もっと読む)
光学式距離計測装置、光学式距離計測装置の距離計測方法および距離計測用プログラム
【課題】低コストで製造することが可能な光学式距離計測装置を提供すること。
【解決手段】光学式距離計測装置1は、所定のパターンを断続的に投射するパターン投射装置2と、イメージセンサにより撮像を行う1台の撮像装置3と、制御装置4を備える。撮像装置3はパターン投射装置2が被写体に所定の投射パターンを投射した状態で撮像を行って第1画像データを取得するとともに、被写体に対して所定の投射パターンが投射されていない状態で撮像を行なって第2画像データを取得する。制御装置4は、第1画像メモリ13aに展開された第1画像データと第2画像メモリ13bに展開された第2画像データの差分から、所定の投射パターンの反射光のみを含む第3画像データを抽出し、第3画像データの画素間の自己相関係数R(x,y)を各画素P(x,y)について算出し、各画素P(x,y)の自己相関係数R(x,y)に基づいて、被写体までの距離を取得する。
(もっと読む)
測距装置及び撮像装置
【課題】装置構成の複雑化を招くことなく、測距用撮像素子から出力される画像信号に含まれている暗電流ノイズを除去できるようにした測距装置を提供する。
【解決手段】
3つの撮像素子のうちの中央に位置する暗電流検出用撮像素子22bに光が入射しないように、該暗電流検出用撮像素子22bの周囲を覆って遮光する遮光部材25と、両側の測距用撮像素子22a,22cの撮像領域22a1,22c1から出力される画像信号、及び暗電流検出用撮像素子22bの撮像領域22b1から出力される暗電流ノイズ画像信号を取り込み、取り込んだ各画像信号から暗電流ノイズ画像信号を減算して、各画像信号に含まれている暗電流ノイズを除去する暗電流ノイズ除去部27を有し、測距演算部28は、暗電流ノイズ除去部27で暗電流ノイズが除去された画像信号に基づいて被写体までの距離を算出する。
(もっと読む)
信号処理装置、及び走査式測距装置
【課題】走査式測距装置による測定情報を利用して、測定光の伝播方向と交差する方向に移動する移動体の速度を正確に算出することができる信号処理装置を提供する。
【解決手段】信号処理装置は、測定対象空間に向けて所定の走査周期Tで測定光を走査する走査式測距装置1から入力される単位走査毎の測定情報を記憶する記憶部と、記憶部に記憶された過去と現在の単位走査毎の測定情報を走査方向に相対的にシフトさせたときに、双方の測定情報の一致度が最大となるシフト量Sと走査周期とTから移動体の速度を算出する速度演算部と、速度演算部で算出された速度に基づいて前記移動体の状態情報を出力する出力部と、を備えている。
(もっと読む)
距離測定モジュール及びこれを含むディスプレイ装置、ディスプレイ装置の距離測定方法
【課題】本発明は距離測定モジュール及びこれを含むディスプレイ装置、ディスプレイ装置の距離測定方法に関する。
【解決手段】本発明の一実施例による距離測定モジュールは、被写体を撮像する撮像レンズと、前記撮像レンズと隣接して配置され、前記被写体に基準光を照射する光源部と、前記被写体から反射し前記撮像レンズを介して入射された反射光を受光して前記被写体の映像情報及び距離情報を抽出する受光部と、前記基準光と前記反射光の位相差を用いて前記被写体の距離Dを演算する演算部と、を含むことができる。
(もっと読む)
デプスカメラの互換性
奥行き画像コンシューマーと複数の異なる奥行き画像プロデューサーとの間の互換性が、奥行き画像コンシューマーとの互換性がないサポートされていないデプスカメラパラメーターを有する固有の奥行き画像を受信し、当該固有の奥行き画像を、奥行き画像コンシューマーと互換性のあるサポートされた仮想デプスカメラパラメーターを有する仮想的な奥行き画像へと変換することによって提供される。この仮想的な奥行き画像は奥行き画像コンシューマーへ出力される。  (もっと読む)
(もっと読む)
距離計測装置及び距離計測方法
【課題】距離や反射率の異なる物体の距離を高い精度で計測する。
【解決手段】
次数の異なる照射角度の関数で表現される2種類の照度パタンの照射光を第1ライト21及び第2ライト22に照射させる照射制御機能と、カメラシステム30に各照射光の反射光の撮像データを取得させる撮像制御機能と、得られた各撮像データから種類の輝度パタンを取得させる輝度パタン取得機能と、この2種類の輝度パタンから各画素の指標値を算出する指標値算出機能と、指標値の連続性に基づいて観測領域を識別する観測領域識別機能と、各観測領域の指標値に基づいて、その観測領域を照射する照射光の照射角度を算出する照射角算出機能と、算出された照射角度と、観測領域の撮像角度と、第1ライト21及び第2ライト22とカメラシステム30との位置関係に基づいて、物体までの距離を算出する距離算出機能を実現させる制御装置10を備える。
(もっと読む)
車両用距離画像データ生成装置及び方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置及び方法を提供すること。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8と、タイミングコントローラ9と、高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、ノイズによる輝度を抑制しつつ移動平均に基づいて、距離画像データの生成に用いられる輝度を補正するステップS3〜S5の処理を備えた。
(もっと読む)
レーダ装置
【課題】設定された距離範囲の反射物を検出するレーダ装置を提供する。
【解決手段】レーザの反射光の強度に応じて受光回路が出力する受信信号は、AD変換器でデジタル信号に変換される。ピーク抽出手段44は、ピーク閾値よりも連続して大きいデジタル信号のグループをピーク領域として抽出し、0以外のピーク番号を付す。マップ比較手段60は、0以外のピーク番号を有するピーク領域を構成するデジタル信号の1個でも、その信号値がマップDPRAM56にサンプリング番号毎に記憶されているマップデータよりも大きいと、そのピーク領域を有効ピーク領域と判断し、有効ピーク領域を構成する全デジタル信号を有効信号として選択する。距離算出手段64は、有効ピーク領域を構成するデジタル信号に基づいて有効ピーク領域のピーク位置を推定し、反射物までの距離を算出する。
(もっと読む)
内視鏡装置における距離情報取得方法および内視鏡装置
【課題】患者の負担の増大やコストアップを招くことなく被観察体とスコープ部の撮像素子との距離情報を取得する。
【解決手段】照明光を被観察体に照射する照明光照射部と照明光の照射により被観察体から反射された反射光を受光して被観察体の像を撮像する撮像素子とを有するスコープ部と、スコープ部の撮像素子から出力された画像信号に分光画像処理を施して所定波長の分光推定画像信号を生成する分光画像処理部とを備えた内視鏡装置において、被観察体と撮像素子の各画素との距離情報を取得する距離情報取得方法であって、分光画像処理部において、撮像素子から出力された画像信号に基づいて、650nm以上の所定波長の分光推定画像信号を距離情報取得用分光推定画像信号として生成し、距離情報取得用分光推定画像信号に基づいて、撮像素子の各画素と被観察体との距離を示す距離情報を取得する。
(もっと読む)
距離測定装置および方法並びにプログラム
【課題】精度よく対応点を探索するための相関ウィンドウのサイズを簡易に算出する。
【解決手段】ウィンドウサイズ設定部32が、基準画像上の対象点を通る所定方向において、所定輝度間隔にて設定された基準輝度レベルの境界にある境界画素を探索し、互いに隣接する境界画素間の画素数を算出し、画素数に基づいて、対象点に対する参照画像上の対応点を探索する際に使用される相関ウィンドウのサイズを設定する。ステレオマッチング部30が、相関ウィンドウ内の各画素と、参照画像上に設定された相関ウィンドウ内の各画素との相関を算出することにより対応点を探索する。距離画像生成部31が、探索した対応点に基づいて被写体までの距離を算出する。
(もっと読む)
計測用内視鏡装置およびプログラム
【課題】計測位置を確定する操作の負担を軽減し、計測作業の効率を向上することができる内視鏡装置およびプログラムを提供する。
【解決手段】操作部6には、画像上の計測位置を示す位置情報と計測位置の確定指示とが入力される。CPU18は、入力された位置情報が示す位置に目印を表示し、確定指示が入力された場合には表示中の目印の位置を固定すると共に次の目印を表示するように映像信号処理回路12を制御する。また、CPU18は、確定指示が入力されていない計測位置と、確定指示が入力された計測位置との両方に基づいて計測を実行する。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器7と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備え、画像処理部10は、パルス光を投光せずに自車両前方を撮像した外乱光ノイズ除去用のフィルタ画像に基づいて、各撮像画像の輝度を補正する。
(もっと読む)
光検出装置及び光検出方法
【課題】投光した光の情報の検出精度を向上させる。
【解決手段】光を投光する投光装置1と、投光する光の変調周波数を算出する変調周波数算出部32と、投光手装置1から投光された光を撮像する撮像装置2と、変調周波数算出部32により算出された変調周波数に基づいて、光の情報の検出に影響を及ぼす周波数を算出する周波数算出部33と、撮像装置2により撮像された撮像情報から周波数算出部33により算出された周波数の情報を除去し、撮像情報に含まれる光の情報を検出する同期検波処理部37とを備える。
有する車載警報装置。
(もっと読む)
物体検出装置及び測距方法
【課題】レーダ受信信号から直接計測することができない遠方に存在する対象物体までの距離を高い精度で演算する物体検出装置を提供する。
【解決手段】
【請求項1】車載のカメラ10の撮像画像の情報に基づいて、測距対象となる対象物体と測距の基準とする基準物体との相対位置関係を算出する物体間相対位置算出部30と、車載のレーダ測距装置20により取得された受信信号に基づいて、測距の基準として選択された基準物体と自車両との間の基準距離を求める基準距離計測部40と、レーダ測距装置20が対象物体までの距離を測距できない場合は、対象物体と基準物体との相対位置関係と自車両から基準物体までの基準距離とに基づいて自車両から対象物体までの距離を演算する距離演算部50とを有する。
(もっと読む)
1 - 20 / 49
[ Back to top ]