
Fターム[2F129BB14]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 絶対位置測位 (12,751) | 自然にあるもの (84) | 地形 (56)
Fターム[2F129BB14]に分類される特許
1 - 20 / 56
位置判定装置およびナビゲーション装置並びに位置判定方法,プログラム
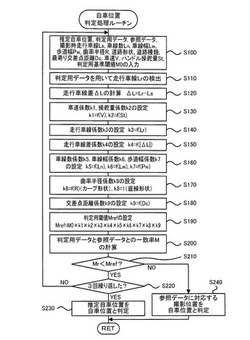
【課題】車両の地図上の位置をより適正に判定する。
【解決手段】車載カメラから撮影される風景画像と複数の参照データとが一致しているか否かを判定するマッチング処理により一致していると判定された参照データに対応する撮影位置に基づいて車両の現在位置である自車位置を判定するものにおいて、マッチング処理は、車載カメラから撮影される風景画像に対して特徴点を抽出する所定の画像処理を施して得られる判定用データと参照データとの一致率Mが判定用閾値Mref以上のときに一致していると判定し、一致率Mが判定用閾値Mref未満のときに一致していないと判定することにより行なわれ(S210)、判定用閾値Mrefは、車速Vが大きいほど小さくなるように且つハンドル操舵量Stが大きいほど小さくなるように調整されている(S130)。これにより、判定用データと参照データとが一致していると判定されやすくすることができる。
(もっと読む)
位置判定装置およびナビゲーション装置並びに位置判定方法,プログラム

【課題】車両の地図上の位置をより適正に判定する。
【解決手段】道路上で走行方向に間隔をもって車載カメラから撮影された風景画像の特徴点を抽出して得られる複数の参照データをそれぞれ対応する撮影位置と関連付けて参照データDB44に記憶しておき、車載カメラから撮影される風景画像と複数の参照データとが一致しているか否かを判定するマッチング処理を行ない、マッチング処理により一致していると判定された参照データに対応する撮影位置に基づいて自車位置を判定するものにおいて、隣接する参照データの道路上の参照データ間隔Dは、道路の幅員が小さいほど短くなるように調整されてなる。これにより、マッチング処理により判定用データと参照データとが一致していると判定される機会を増やすことができる。
(もっと読む)
方位表示装置、方位表示方法およびプログラム
【課題】周囲の環境の影響を受けることなく、方位を正しくユーザに示す。
【解決手段】方位表示装置であって、表示部と、被写体を撮影する撮影部と、当該方位表示装置が存在する位置を測定する位置測定部と、位置測定部にて測定された位置を中心とした周囲の地形を示す全方位地形データによる地形と、撮影部にて撮影された撮影画像中の地形とに基づき、撮影の方向の方位を特定する方位特定部と、方位特定部にて特定された方位を認識させることが可能な画像を、当該撮影画像に重畳させて表示部に表示させる制御部とを有する。
(もっと読む)
移動体位置検出装置
【課題】マップマッチングによる移動体の現在位置の測位を、車両の進行方向を加味しつつ簡便かつ精度よく行えるようにする。
【解決手段】移動体としての車両Vに、道路周辺の物体を検出する物体検出センサ1が設けられる。車両Vの現在位置の測位に先立って、物体検出センサ1によって検出された所定の固定物についての検出データと地図データとをマッチングさせることにより、車両Vの進行方向の補正が行なわれる。補正された後の車両Vの進行方向に基づいて、移動体の現在位置の測位のためのマッチングが行われる。
(もっと読む)
位置情報補正システム
【課題】GPSで測位した位置情報を補正することができるようにした位置情報補正システムを提供する。
【解決手段】携帯電話機1の位置情報ログ取得部11は、GPS受信機を用いて位置情報をログとして取得する。送信部12は、位置情報ログ取得部11から取得した位置情報ログを、ネットワーク5を介してサーバー4に送信する。サーバー4の受信部41は、ネットワーク5を介して携帯電話機1から送信されてきた位置情報ログを受信し、記憶部42に記憶させる。位置情報精度判定部44は、記憶部42に記憶されている位置情報ログを読み出し、位置情報の精度を判定し、判定結果を位置情報補正部45に供給する。位置情報補正部45は、位置情報精度判定部44からの位置情報精度の判定結果から、位置情報ログの取得時刻の前後2つの位置情報ログに基づいて、位置情報ログを補正する。
(もっと読む)
静止物地図生成装置
【課題】走行中の移動体の絶対位置の実時間測定に有用な、道路周辺の静止物に関する高精度な測位データを簡単に収集することが可能な装置を低コストで実現すること。
【解決手段】この静止物地図生成装置100は、自車両周辺における物体の同一時刻における相対位置の平面分布を表すローカルマップを生成するローカルマップ生成手段130と、移動物が検出される可能性が高い検出領域から検出された物体の上記の相対位置の位置データの重みをその可能性に対して単調に減少させる重み付け手段140と、異時刻に生成された同一地点周辺の複数のローカルマップを照合するローカルマップ照合手段150と、このローカルマップ照合手段によって対応づけられる同一地点について、上記の絶対位置取得装置の出力情報に基づいて算定される異時刻の複数の当該絶対位置を平均化処理する平均処理手段160などを有して成る。
(もっと読む)
移動体測位装置
【課題】マルチパスの影響を低減し、位置精度を向上させることができる移動体測位装置を提供する。
【解決手段】画像処理部30において、カメラ20で取得した画像から抽出した建築物5の第1位置及び第2位置における所定の水平の基準線から建築物5の最上部までの画像上の仰角θ1、θ2を算出する。そして、測位演算制御部50において、第1位置と第2位置間の距離及び第1位置及び第2位置における建築物5の画像上の仰角θ1、θ2から建築物5の実際の高さHを算出する。算出した建築物5の実際の高さHと第2位置において、GNSS受信機10で取得したGNSS衛星の位置情報とに基づき、建築物5が、GNSS衛星からの電波を受信する際に障害になるか否かを判定し、障害になると判定した場合には、当該GNSS衛星から受信している電波をマルチパスと判定して、受信した電波の情報を用いないで測位演算を行う。
(もっと読む)
経路案内装置、経路案内プログラム、及び経路案内方法
【課題】自位置が経路案内地点に到達するまでに、音声による経路案内を完了できる経路案内装置を提供する。
【解決手段】案内地点に関する同趣旨の経路案内のための案内音声であって発音時間が段階的に異なる複数種類の案内音声を生成可能に構成され、案内地点に関する経路案内を行うに際して、判定された推定到達時間以内で発音時間が最も長い案内音声を生成する案内音声生成部35を備えた経路案内装置1。
(もっと読む)
地図データ生成装置および走行支援装置
【課題】移動物体を含まない3次元地図データを生成できるようにする。
【解決手段】プローブ車両2の走行に伴って収集された、画像データ、測距データおよび測位データを含むプローブデータを地図データ生成装置10の記憶媒体に蓄積記憶させ、この記憶媒体から、同一地点より同一の場所を撮影した撮影画像を含む複数のプローブデータを抽出し、当該同一の場所を撮影した撮影画像の特定画素(X、Y)の画素データの分散値に基づいて、移動物体を含まない撮影画像を特定し、移動物体を含まない撮影画像を含むプローブデータに基づいて移動物体を含まない3次元の地物図データを生成する(S202)。
(もっと読む)
ナビゲーション装置
【課題】ユーザーにとってより解り易く、施設からの退出後の進路を案内する。
【解決手段】ナビゲーション装置1は、施設Pからの退出前に、退出後の進路とその進路を進行して到達可能な地域との関係を、音声及び文字の少なくとも一方により提示する方面案内を行う方面案内部12と、施設Pの規模及び種類の少なくとも一方に基づいて、地域の規模に応じて予め定められた複数の案内レベルGLVの中から1つを決定する案内レベル決定部11とを備え、方面案内部12は、決定された案内レベルGLVに応じた地域の名称を用いて方面案内を実施する。
(もっと読む)
走行支援システム、走行支援プログラム、及び走行支援方法
【課題】それぞれの走行支援処理の目的に応じた認識精度を確保しつつ、簡易かつ迅速に走行支援処理を実行することができる走行支援システムを実現する。
【解決手段】車両の走行支援に関する複数の支援処理APを実行可能な走行支援システム1。画像データ中に含まれる認識対象物の画像認識処理を行う画像認識部36と、画像認識処理の結果に基づいて動作する支援処理APのそれぞれについて当該支援処理APの実行のための要求認識精度に応じた画像データ中の設定認識領域の情報を記憶した認識領域情報記憶部73と、実行候補支援処理を抽出する候補処理抽出部31と、抽出された実行候補支援処理について、画像認識処理により認識対象物が認識された画像データ中の位置が当該実行候補支援処理についての設定認識領域内に含まれていることを条件として当該実行候補支援処理の実行を許可する支援処理実行管理部37と、を備える。
(もっと読む)
制御装置
【課題】坂道において安全にアイドリングストップするための制御を行う制御装置を提供すること。
【解決手段】移動体に備えられ、
前記移動体の停止する位置が坂道であるか否かを判定する制御部を備える制御装置であって、
前記制御部は前記移動体が停止する位置が坂道であるときに、アイドリングストップに関する制御と所定の制御を行うことを特徴とする。
(もっと読む)
車載用ナビゲーション装置
【課題】マップマッチングの精度を向上させることが可能な車載用ナビゲーション装置を提供する。
【解決手段】道路の地物を撮影し画像信号を出力するカメラ180と、画像信号から、特徴的な地物が存在する位置を表す情報である特徴点を抽出する特徴点抽出部113と、自車両の現在地を検出する現在地検出装置170と、現在地検出装置170により異なる時間にそれぞれ検出された複数の現在地を、自車両の走行軌跡として記録する走行軌跡記録部114と、特徴点により表される位置に基づいて、当該特徴点を走行軌跡に含まれるいずれかの地点に関連付けて記録する特徴点記録部115と、を備える車載用ナビゲーション装置100。
(もっと読む)
画像処理システム及び位置測位システム
【課題】位置決めのための風景画像認識技術に利用される効果的な参照データの生成に適した画像処理システムとそのような参照データを用いた位置測位システムを提供する。
【解決手段】風景を撮影した撮影画像から画像特徴点を抽出する特徴点抽出部と、撮影画像に特定被写体が含まれている可能性を表す撮影状況情報に基づいて画像特徴点の重要度を決定し、この重要度に基づいて画像特徴点から撮影画像に対応する画像特徴点データを生成し、画像特徴点データを当該画像特徴点データに対応する撮影画像の撮影位置を含む撮影属性情報と関係付けて、参照データとして生成する画像処理システム。
(もっと読む)
イメージ拡張型の慣性航行システム(IAINS)及び方法
【課題】輸送手段用のイメージ拡張型(image−augmented)の慣性航行システム及び方法を提供する。
【解決手段】輸送手段10上に搭載されたイメージ拡張型の慣性航行システムは、航行状態ベクトルを推定するように構成された慣性航行システムと、イメージャーの視野(x,y,z)を通過する地形特徴に関連するピクセル信号を出力するように構成されたイメージャー12とを含む。処理装置は、特徴ピクセル信号に関連する所与の画像フレームに対して、イメージャーからイメージャーの視野を通過する1つまたは複数の地形特徴の中心までの距離を感知し、地形特徴がイメージャーの視野を通過するにつれて、各地形特徴を追跡する。処理装置はさらに、追跡された地形特徴に関する慣性航行システムの計算されたNED(前、右、下)座標位置情報に基づき、慣性航行システムの航行状態ベクトルを更新する。
(もっと読む)
風景画像認識を用いた自車位置検出システム
【課題】風景画像認識技術を用いながらも、効率的な自車位置検出が可能な自車位置検出システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像から画像特徴点を抽出することによって生成された画像特徴点データに対応撮影画像の撮影位置を関係付けた参照データ群を格納している参照データベースベース92と、道路形状情報から推定自車位置における道路形状を判断し、当該道路形状と類似する道路形状が続く類似道路形状範囲を算定する道路形状評価部と、実撮影画像から抽出された画像特徴点からなるマッチング用データのマッチング相手としての参照データを参照データベースベース92から抽出する際に類似道路形状範囲を用いて参照データを決定する抽出参照データ決定部と、マッチングした参照データに関係付けられた撮影位置に基づいて自車位置を決定する自車位置決定部が備えられている。
(もっと読む)
基準パターン情報生成装置、方法、プログラムおよび一般車両位置特定装置
【課題】画像認識による車両位置の特定技術を多くの場面に適用可能にする技術の提供。
【解決手段】基準車両の周囲の風景を撮影した撮影画像から基準となる基準画像特徴点を抽出し、前記基準車両の周囲の風景を撮影した時点での前記基準車両の位置を基準位置として取得し、前記基準画像特徴点の前記撮影画像上での位置を示す基準パターン情報に対して前記基準位置を示す情報を対応づけ、前記基準画像特徴点のうち、環境に応じて前記撮影画像上での位置が変動し得る変動地物の像に由来する前記基準画像特徴点に対しては、前記変動地物の像に由来することを示す情報と、前記変動地物の前記撮影画像上での位置が前記環境に応じて変動することに対応した前記基準画像特徴点の前記撮影画像上での変動範囲を前記環境ごとに示す情報とを対応付けて所定の記録媒体に記録する。
(もっと読む)
画像処理システム及び車両制御システム
【課題】高速道路だけでなく一般道を含め様々な車両走行路の走行中においても画像認識を用いて正確な自車位置検出が可能となる技術の構築。
【解決手段】車両からの風景を撮影した撮影画像に基づいて風景画像の認識を行う際に利用される参照データを作成する画像処理システム。所定形状の道路区間において撮影した撮影画像及び当該撮影画像の撮影位置を入力するデータ入力部と、前記道路区間内の任意の地点を特定地点として、前記道路区間を通過するための前記特定地点での目標運動量を規定する目標運動量設定部と、前記特定地点での前記撮影画像から生成された被マッチングデータを、特定地点の位置及び特定地点における目標運動量と関係付けて、前記参照データとしてデータベース化する参照データデータベース化部とを備えている。
(もっと読む)
風景マッチング用参照データ生成システム及び位置測位システム
【課題】多数のプローブカーから収集された撮影画像に基づき、風景画像マッチング用の効果的な参照用画像データを生成する。
【解決手段】推定自車位置を算定する機能を有する複数のプローブカーによって順次取得されたプローブデータから取り出された所定撮影位置領域の撮影画像の画像類似度を評価して、この画像類似度を撮影画像に付与し、所定度以上の画像類似度を有する複数の撮影画像を処理対象撮影画像として選別し、処理対象撮影画像から演算された画像特徴量に基づいて画像特徴点データを生成する。この画像特徴点データにこの画像特徴点データの元になった処理対象撮影画像の代表撮影位置を関係付けて、風景マッチングに利用される参照データが生成される。
(もっと読む)
風景画像認識を用いた自車位置検出システム
【課題】風景画像認識技術を用いながらも、効率的な自車位置検出が可能な自車位置検出システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像から画像特徴点を抽出することによって生成された画像特徴点データに対応撮影画像の撮影位置と車両イベントを関係付けた参照データ群を格納している参照データデータベース92と、車両の推定自車位置から算定される誤差範囲と実車両イベントとに基づいて、実撮影画像から抽出された画像特徴点からなるマッチング用データに対するマッチング相手候補となる参照データを出力する参照データ出力部と、マッチングした参照データに関係付けられた撮影位置に基づいて自車位置を決定する自車位置決定部が備えられている。
(もっと読む)
1 - 20 / 56
[ Back to top ]