
Fターム[2F129GG06]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報の対象となる車両の構成部分 (2,045) | 操舵機構 (425)
Fターム[2F129GG06]に分類される特許
421 - 425 / 425
ナビゲーション装置
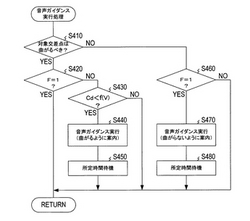
【課題】 運転者に不快感を与えることなく音声ガイダンスを実行するナビゲーション装置を提供する。
【解決手段】 運転データから対象交差点での運転者の行動を推定し、曲がるべき交差点で運転者が直進しようとしている場合(S410:YES,S420:NO)、又は、直進すべき交差点で運転者が曲がろうとしている場合(S410:NO,S460:YES)、即ち、設定された進路と運転者の行動とが不一致である場合にのみ、音声ガイダンスを実行し、音声ガイダンスを実行した場合は、予め設定された所定時間だけ待機する(S440〜450,S470〜S480)。但し、曲がるべき交差点で直進しようとしている場合は、対象交差点までの距離Cdが、車速Vから算出される必要距離Dneed=f(V)より小さい場合にのみ、音声ガイダンスを実行する(S430)。
(もっと読む)
ナビゲーション装置およびそのプログラムを記憶したコンピュータ読取り可能な記録媒体

【課題】ナビゲーションシステムに記憶されている道路情報に基づいて道路形状を精密に判定する。
【解決手段】ナビゲーションシステム装置に格納されている道路情報から道路形状に関する曲率情報を抽出し、抽出された曲率情報から、先方の道路がワインディング道路か否かを判断する際、曲率情報の他に道路種別や交差点の有無、道幅、直線道路か否か等を考慮して、そのような属性を有する道路については、曲率情報の修正を行い、ワインディング道路判定を精密に行う。
(もっと読む)
車両の制御装置
【課題】 走行経路情報の検出精度に対応して車両の挙動をきめ細かく制御することの可能な車両の制御装置を提供する。
【解決手段】 人工衛星からの電波を受信機で受信することにより、車両の走行経路情報を検出する走行経路情報検出装置と、前記走行経路情報に対応して設定された制御パターンに基づいて前記車両の挙動を制御する挙動制御装置とを備えた車両の制御装置において、前記人工衛星からの電波を受信する受信機の受信信号が異常であるか否かを判断するとともに、前記車両が受信機による電波受信に不適当な場所を走行中であるか否かを判断することにより、前記走行経路情報検出装置により検出される走行経路情報の検出精度を検出する精度検出手段(ステップS11〜S14)と、前記走行経路情報の精度に基づいて前記制御パターンを変更する制御パターン変更手段とを備えている。
(もっと読む)
車両の制御装置
【課題】 走行経路情報の検出精度に対応して車両の挙動をきめ細かく制御することの可能な車両の制御装置を提供する。
【解決手段】 車両の走行経路情報を検出する場合に、各種のセンサの信号から検出される前記車両の走行軌跡と、情報記録媒体に記憶されているデータとを比較して、車両の現在位置を補正するマップマッチングを実行する走行経路情報検出装置と、走行経路情報に対応して設定された制御パターンに基づいて車両の挙動を制御する挙動制御装置とを備えた車両の制御装置において、マップマッチングの実行による車両の現在位置の補正が完了しているか否かを判断することにより、走行経路情報検出装置により検出される走行経路情報の検出精度を検出する精度検出手段(ステップS11,S12,S13)と、走行経路情報の精度に基づいて制御パターンを変更する制御パターン変更手段とを備えている。
(もっと読む)
車両の相対方位検出装置
【課題】 ジャイロセンサを利用することなく、かつ、精度良く、車両の相対方位を検出することができる車両の相対方位検出装置を提供する。
【解決手段】 この相対方位検出装置は、車両のハンドル操作に基づいて車両の相対方位を検出するものであって、操舵角度検出手段50によりハンドルの操舵角度を検出し、絶対方位検出手段20によって車両の絶対方位を検出し、検出された操舵角度と絶対方位とに基づいて単位操舵角度あたりの方位変化量を係数として算出し、ハンドル操作時に操舵角度と予め求められている当該係数とに基づいて車両の相対方位を算出する。
(もっと読む)
421 - 425 / 425
[ Back to top ]