
Fターム[2F129GG06]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報の対象となる車両の構成部分 (2,045) | 操舵機構 (425)
Fターム[2F129GG06]に分類される特許
381 - 400 / 425
車両の障害物表示装置
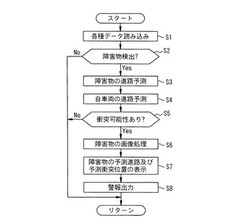
【課題】前方障害物の危険性を運転者が瞬時に判断することができる。
【解決手段】障害物表示装置は、自車両と前方障害物との位置関係を検出し(ステップS2)、その位置関係に基づいて、当該前方障害物の自車両に対する衝突可能性を判定し(ステップS3〜ステップS5)、衝突可能性ありと判定した前方障害物について予測進路及び自車両との予測衝突位置の情報を撮像画像に重畳して画像表示する(ステップS6、ステップS7)。
(もっと読む)
ナビゲーション装置

【課題】運転者と非運転者に対してそれぞれ適切な入出力制御を実現すること。
【解決手段】操作入力受付部321が乗員からの操作入力を受け付けた場合に、操作者識別部321aによって操作者が運転者であるか非運転者であるかを識別する。さらに車速センサ322が自車両の走行速度を、変速機構状態検知部323が変速機の状態を、ブレーキ状態検知部324がブレーキの動作状態を、ハンドル操作状態検知部326がハンドルの操作状態をそれぞれ取得する。そして、運転者用入出力制御部311aと非運転者用入出力制御部311bが、自車両の走行速度や変速機の状態、ブレーキの状態、ハンドル操作状態などに基づいて運転者に対する入出力と非運転者に対する入出力とを個別に制御する。
(もっと読む)
車両制御装置
【課題】制御パラメータに誤差が生じるのを防止し、走行フィーリングを良くするとともに、走行制御の確実性を向上させることができるようにする。
【解決手段】データ記憶部16と、データ記憶部16からノードデータを読み出すデータ読出手段61と、ノードデータに基づいて、所定のノードにおいてリンク角が設定値以下である場合に、所定のノードのノードデータが無効であるとするノードデータ判断手段91と、無効なノードデータを間引くノードデータ加工手段92と、有効なノードデータに基づいて走行制御用の制御パラメータを算出するパラメータ算出手段93と、制御パラメータに基づいて走行制御を行う走行制御手段94とを有する。無効なノードデータが間引かれ、有効なノードデータに基づいて走行制御用の制御パラメータが算出されるので、走行フィーリングを良くするとともに、走行制御の確実性を向上させることができる。
(もっと読む)
車載装置
【課題】運転者と非運転者に対してそれぞれ適切な入出力制御を実現すること。
【解決手段】操作入力受付部321が乗員からの操作入力を受け付けた場合に、操作者識別部321aによって操作者が運転者であるか非運転者であるかを識別する。さらに車速センサ322が自車両の走行速度を、変速機構状態検知部323が変速機の状態を、ブレーキ状態検知部324がブレーキの動作状態を、ハンドル操作状態検知部326がハンドルの操作状態をそれぞれ取得する。そして、運転者用入出力制御部311aと非運転者用入出力制御部311bが、自車両の走行速度や変速機の状態、ブレーキの状態、ハンドル操作状態などに基づいて運転者に対する入出力と非運転者に対する入出力とを個別に制御する。
(もっと読む)
車両用ナビゲーションシステム
【課題】 本発明は車両走行中にナビゲーションシステムの入力操作が禁止されることを課題とする。
【解決手段】 ナビゲーション用ECU14は複数の人口衛星からの電波から現在位置を演算し、液晶ディスプレイ18に測定位置及びその周辺の地図を表示する。運転者用カメラ22は、運転者38の顔を正面から撮像する位置に設けられている。顔向き検知ECU36は、運転者用カメラ22からの映像信号に基づいて顔の向きを検知し、顔の向き(左右方向の角度)に応じた顔向き検知データをナビゲーション用ECU14に出力する。ナビゲーション用ECU14は、車両走行中に入力操作を禁止する入力禁止手段60と、顔向き検知ECU36から供給された顔向き検知データにより運転者38の顔が車両の正面を向いているか否かを判定する顔向き判定手段62と、運転者38の顔が車両の正面を向いている場合に入力禁止を解除し、入力操作を許可する入力許可手段64とを有する。
(もっと読む)
ナビゲーション装置及びナビゲーション方法
【課題】 運転技能に応じた適切な操作案内をドライバに提供できるナビゲーション装置及びナビゲーション方法を提供する。
【解決手段】 車両が予め決められた特定状況にあると判定する状況判定手段と、前記特定状況における現実の車両制御状態を検出する現実状態検出手段と、前記特定状況に応じた適正な車両制御状態を特定する適正状態特定手段と、前記現実の車両制御状態と前記適正な車両制御状態とに基づいて前記特定状況におけるドライバの運転技能を学習する学習手段と、学習された前記運転技能に応じた操作案内を前記特定状況で出力する案内手段と、を備えるナビゲーション装置。
(もっと読む)
車両情報通知装置
【課題】車両情報の緊急度に応じて車両の運転に支障がない状況になるように車両を誘導して、速やかに緊急度の高い車両情報を通知することができる車両情報通知装置を提供すること。
【解決手段】受信部11が通知すべき車両情報を受信すると、状況判定部12が車両情報を通知しても運転に支障がない状況であるか否か、すなわち車両が停止しているか否かを判定し、車両が停止している場合には通知部15に車両情報通知要求を出力して車両情報を通知させる。車両が停止していない(走行中)場合には、緊急度判定部13が通知すべき車両情報の緊急度を判定し、緊急度が高いと判定された場合には誘導部14が通知部15を用いて、音声や表示装置7の一部を点滅、または点灯させて車両情報を受信したことを運転者に認識させて車両を停車させるように誘導して車両を停車させた後に車両情報を運転者に通知する。
(もっと読む)
自車位置検出装置、ナビゲーション装置、減速制御装置及び自車位置検出方法
【課題】 分岐地点で自車両が分岐路に進んだかどうかの判断を的確に行い、ナビゲーション装置で認識している自車両の現在位置を的確に補正する。
【解決手段】 単眼カメラ4の撮像情報に基づいて左右の道路白線の線種を判断し、ナビゲーション装置2からの自車両前方の道路地図情報に基づいて自車両前方にインターチェンジ出口への分岐地点を検出したとき、左右の道路白線の何れか一方が分岐地点の境界線の特徴である太破線であることが検出され(ステップS21、S25)、その後、他方の道路白線が太破線であることが検出されたとき(ステップS22、S26)、自車両は境界線を跨いで走行し、すなわち、本線から分岐路に進んだと判断する(ステップS23、S27)。この境界線を跨いだことを検出したとき、ナビゲーション装置2に対して位置補正要求を行い、ナビゲーション装置2では自車両の現在位置を、分岐地点の境界線近傍の位置に補正する。
(もっと読む)
GPSロストの予測方法、GPSロストの予測装置及び車両用走行制御装置
【課題】 GPSロストに対してドライバが余裕を持って対応することができるようにする。
【解決手段】 自車両前方の撮像画像において、予め設定した経路上前方距離だけ前方の地点に開空率検出領域Adを設定し(ステップS1〜S3)、この開空率検出領域Ad内の画像に基づいて、前記前方地点に自車両が到達したときの将来開空率を予測する。例えば、開空率検出領域Adにおいて、空の領域の面積を検出し、この開空率検出領域Adにおける前方開空率を算出し、これを将来の開空率をする(ステップS4)。この将来の開空率がそのしきい値以下であるとき、GPSロストが生じると判断し(ステップS6)、これをドライバに通知する(ステップS8)。
(もっと読む)
車両挙動制御装置
【課題】ヨーレートセンサのゼロ補正ずれによる不適切な挙動制御を防止しつつ、ヨーレートセンサのゼロ補正出力が得られない場合でも適切な挙動制御が行える車両挙動制御装置を提供すること。
【解決手段】ヨーレートセンサ5を用いて車両の挙動制御を行う車両挙動制御装置であって、車両の停止中にヨーレートセンサ5のゼロ点出力を演算し(S30)、車両の走行中にヨーレートセンサ5のゼロ点出力を演算し(S26)、停止中のゼロ点出力と走行中のゼロ点出力との差が所定値を超える場合には停止中のゼロ点出力と走行中のゼロ点出力との差が所定値を超えない場合に比べて挙動制御開始しきい値を高く設定する(S48)。これにより、ヨーレートセンサ5のゼロ点補正が適切に行われていないおそれのある場合には、挙動制御開始しきい値が高く設定され挙動制御に入りにくくなり、不適切に挙動制御が行われることを防止できる。
(もっと読む)
3次元グラフィックディスプレイ装置、3次元グラフィックディスプレイ方法、3次元グラフィックディスプレイプログラム及び3次元グラフィックディスプレイプログラムを記録した記録媒体
【課題】小さなサイズのメモリでも切れ目のない3次元グラフィックをディスプレイ可能にする。
【解決手段】3次元グラフィックデータを保存するメモリ120と、移動体の位置及び動き情報を利用して、一定時間が経過したディスプレイ時点の移動体の位置の候補領域を予測する予測部100と、予測された移動体の位置の候補領域に該当する3次元グラフィックデータをメモリにローディングさせるローディング部110と、メモリ120にローディングされた3次元グラフィックデータのうち、ディスプレイ時点の移動体の位置の周辺領域に該当するデータをレンダリングするレンダリング部130と、レンダリングされたデータをディスプレイするディスプレイ部140と、を備える。
(もっと読む)
施設検索装置
【課題】 ユーザーが施設名称を入力したとき、以前の名称であっても検索を可能にする。
【解決手段】 車両用ナビゲーション装置1の制御回路2は、操作スイッチ群7などにより施設名称が入力されると、情報記録媒体14の最新施設情報データから当該入力施設名称の有無を判断し、有りが判断されれば、該入力施設名称に対応する最新施設情報及び地図上の位置情報を表示装置6に表示する。前記入力施設名称無しが判断されると、次に当該入力施設名称の有無を、情報記録媒体14の前記旧施設情報データから判断する。そして、前記入力施設名称有りが判断されると、前記旧施設情報及びこれに関連する最新施設情報並びに地図上の位置情報を表示装置6に表示する。従って、旧施設名称が入力されてもこの旧施設名称から最新の施設名称及び地図上の位置を認識できる。
(もっと読む)
車載レーダ装置、車両制御システム
【課題】 路側通信装置などのインフラを用いることなく、右折車両,停止車両,前方車両等によって生じる死角の状況を把握するための情報を取得可能な車載レーダ装置、及びその車載レーダ装置を利用した車両制御システムを提供する。
【解決手段】 レーダ波の送受信により自車両前方の物体を検出し、検出された物体の中から監視の対象とすべき対象車両(自車両の前方を走行する前方車両や走行路上の停止車両)、及びその対象車両によって生じる死角に存在する死角物体を抽出する(S110〜S150)。通常モード(対象車両が前方車両)の場合、前前方車両(死角車両)が存在し且つ減速していれば、前前方車両減速フラグをオンに設定し、死角検知モード(対象車両が停止車両)である場合、死角物体が存在していれば、死角物体存在フラグをオンに設定し、これらフラグ情報を対象車両の情報と共にECUに送信する(S160〜S220)。
(もっと読む)
車両転回検出装置および当該装置を備えた車両用ナビゲーション装置
【課題】 車両が走行中の道路を転回(Uターン)したことを確実に判別可能な車両転回検出装置、および当該装置を備えたナビゲーション装置を提供すること。
【解決手段】ECU8は、車両が車線区分線を横断すると第1タイマを起動する。位置検出器1が検出した車両の進行方向から、当該車両が反転したことが確認された際、第1タイマが起動中であって経過時間が所定時間以内である場合や、第2タイマの示す経過時間が所定時間以内で第1タイマの起動が確認された場合、すなわち、所定時間範囲内において、車両が進行方向の反転と車線区分線の横断とを行った場合に、車両が転回(Uターン)したと判別する。
(もっと読む)
カーナビゲーション装置
【課題】外部記憶装置に記憶された地図データの一部をメモリに記憶して、メモリに記憶された地図データに基づいて経路案内を行うカーナビゲーション装置において、メモリに記憶された地図データの不足による不都合に対処する。
【解決手段】 位置検出器により自車の現在位置を検出し(S100)、検出した現在位置からメモリに記憶された地図データの境界までの距離が所定距離rとなる方向の範囲を決定する(S160)。この範囲は、地図データが少ない範囲であるので、自車がその方向へ走行しているかどうかをさらに判断する(S170)。そして、その方向へ走行しているが、メモリの地図データを更新することができない場合には、自車位置が地図データからもうすぐ外れる可能性があることを知らせる警告を出力する(S190)。これにより、搭乗者は、迅速に、読み取り機に地図データが記憶されたディスクを装着し直す作業をすることが可能となる。
(もっと読む)
ナビゲーションシステム、マッチング方法、経路探索サーバおよびナビゲーション端末装置
【課題】 ナビゲーション端末装置の現在位置を道路上に補正するためのマッチング処理を正確に行う。
【解決手段】 ナビゲーションシステム10は、衛星航法手段212、自律航法手段213、マッチング処理手段215、地点記憶手段219、測位手段選択部214を備えている。分岐ノードを通過した後の走行距離を自律航法手段213から取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を地点記憶手段219に記憶し、測位手段選択部214は、所定の選択条件に従って衛星航法手段212または自律航法手段213の測位出力の何れかを選択し、マッチング処理手段215は、自律航法手段213が選択された場合は自律航法手段測位結果から移動体の進行方向を判別し、地点記憶手段219を参照し、進行方向に合致するリンク上の推定位置の地点をマッチング位置として選択する。
(もっと読む)
カーナビゲーションシステム
【課題】 経路探索の機能を備えるものにあって、有料道路の出入口におけるETC専用レーンの設置状況を、経路探索に反映させる。
【解決手段】 制御回路は、ETC車載機からの信号に基づいて、自車両がETCシステムの利用が可能かどうかを判断し(S1)、ETCシステムが利用可能なことを条件に、経路探索にETC専用レーンの有無を加味するようになっている。このとき、有料道路の各出入口料金所に関し、各出入口を通過する際の通過コストが予め付与され、道路データ中に含まれるようになっており、経路探索のコスト計算にこの通過コストを用いる(加味する)ことによって、ETC専用レーンの有無を考慮した経路探索を行う(S2〜S4)。通過コストは、ETC専用レーンが存在する出入口に対し、ETC専用レーンが存在しない出入口よりも小さくなるように付与(設定)され、出入口におけるETC専用レーンの数が多いほどコストがより小さく付与(設定)される。
(もっと読む)
車両の走行制御装置
【課題】道路に合わせて走行路を適切に学習し、確実且つ安定した自動操縦制御を行う。
【解決手段】ドライバが自動操縦制御のメインスイッチ11がONされ、自動操縦制御における目標車速が設定されて、基準局4との通信が確立され、自車両1の現在位置が過去に作成された走行路と略一致していても、自動操縦制御スイッチがONにされていない場合は、走行路の学習が行われる。走行路の学習は、現在の走行路が、過去に記憶した走行路に対する順方向路と逆方向路のどちらかであるかを判定し、この判定結果に基づき、順方向路と逆方向路をそれぞれ区別して学習させる。また、順方向路と逆方向路の判定は、基準局4と自車両1との通信が確立した際の基準局4と自車両1との距離がLc以下の場合に現在の走行路が順方向路と判定する。また、判定結果が逆方向路となった場合でも、順方向路に対する平均位置の誤差が閾値以内であれば順方向路として学習させる。
(もっと読む)
車両の走行支援装置
【課題】運転者の所望する走行軌跡に沿った目標進行路を比較的簡単に構築することができるようにする。
【解決手段】基準局4を駐車スペースの近くに設置し、基準局4の通信可能エリア内で自車両1を走行させることで駐車スペースまでの走行データを取得し(S2)、取得した走行データに基づいて生成したノード列βと前回の生成したノード列αとのノード数αn,βnを比較し、少ないノード数αn(或いはβn)のノード列α(或いはβ)を基本ノード列κとして設定し(S5)、基本ノード列κのノード点を基準に他方のノード列β(或いはα)の距離差が最小のノード点を選択し(S7)、この両ノード点の平均値で、基本ノード列κのノード点を学習し(S8)、学習ノード列γを生成する(S9)。そして、この学習ノード列γに基づいて駐車スペースまでの目標進行路を生成し自車両1を自動操縦制御させる。
(もっと読む)
車両の走行制御装置
【課題】 実際の道路状況やドライバの意志等を経路に的確に反映させて利便性の高い自動操縦制御を実現することができる車両の走行制御装置を提供する。
【解決手段】 制御装置8は、基準局4との通信が確立した際に、測位される自車位置に基づいて取得した走行ルートを用いて自車両1に対する走行制御ルートを学習する走行制御ルート学習制御、或いは、各走行制御ルートの中から利用可能な所定の走行制御ルートを選択して自車両1を自動操縦する自動操縦制御の何れかを予め設定された条件に従って選択的に実行可能な構成であり、しかも、ユーザによって走行制御ルート学習制御が選択されている場合には、当該走行制御ルート学習制御を優先的に選択して実行する構成となっている。これにより、実際の道路状況やドライバの意志等を経路(走行制御ルート)に適切に反映させることができ、利便性の高い自動操縦制御を実現することができる。
(もっと読む)
381 - 400 / 425
[ Back to top ]