
GPSロストの予測方法、GPSロストの予測装置及び車両用走行制御装置
【課題】 GPSロストに対してドライバが余裕を持って対応することができるようにする。
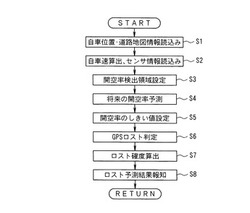
【解決手段】 自車両前方の撮像画像において、予め設定した経路上前方距離だけ前方の地点に開空率検出領域Adを設定し(ステップS1〜S3)、この開空率検出領域Ad内の画像に基づいて、前記前方地点に自車両が到達したときの将来開空率を予測する。例えば、開空率検出領域Adにおいて、空の領域の面積を検出し、この開空率検出領域Adにおける前方開空率を算出し、これを将来の開空率をする(ステップS4)。この将来の開空率がそのしきい値以下であるとき、GPSロストが生じると判断し(ステップS6)、これをドライバに通知する(ステップS8)。
【解決手段】 自車両前方の撮像画像において、予め設定した経路上前方距離だけ前方の地点に開空率検出領域Adを設定し(ステップS1〜S3)、この開空率検出領域Ad内の画像に基づいて、前記前方地点に自車両が到達したときの将来開空率を予測する。例えば、開空率検出領域Adにおいて、空の領域の面積を検出し、この開空率検出領域Adにおける前方開空率を算出し、これを将来の開空率をする(ステップS4)。この将来の開空率がそのしきい値以下であるとき、GPSロストが生じると判断し(ステップS6)、これをドライバに通知する(ステップS8)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、GPS衛星からの電波を受信しこれに基づきGPS測位を行う際に、遮蔽物等によりGPS測位が不可となるGPSロストが生じるかどうかを前以って予測するようにしたGPSロストの予測方法、これを用いたGPSロストの予測装置及び車両用走行制御装置に関するものである。
【背景技術】
【0002】
従来、自動操舵制御装置として、GPS測位により自車位置を計測し、この計測結果に基づいて自動操舵制御を行うようにしたものが提案されている。
このような自動操舵制御装置においては、GPS衛星からの電波を取得することができなくなった場合には、GPS測位が不可となることから、予めGPS測位不可となる地点を考慮して自動運転可能な自動運転サービス提供区間を設定し、この自動運転サービス提供区間が終了する際に、ドライバに対して自動運転サービス提供区間が終了する旨を通知し、ドライバが、手動操舵への交代の準備ができていないと判断されるときには、車両を停車させるようにしたもの(例えば、特許文献1参照)、また、GPS測位に異常が発生した場合等GPS測位が不可となったときには、自律センサを用いて自動操舵を継続することで、自動操舵運転が突然中止されないようにしたもの(例えば、特許文献2参照)、等が提案されている。
【0003】
また、GPS測位が不可となり自動操舵が突然中止されることによってドライバに違和感を与えることを回避するために、ナビゲーション装置の道路地図情報として、トンネル区間等、GPS測位が不可となる道路種別を保持しておき、このようなGPS測位が不可となる区間を、ナビゲーション装置の道路地図上に表示することによって、ドライバにGPS測位が不可となることを通知するようにしたシステムも提案されている(例えば、特許文献3)。
【特許文献1】特開2002−251690号公報
【特許文献1】特開平7−104847号公報
【特許文献1】特開平6−317650号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、GPS衛星からの電波を利用して、自動走行に利用する高精度な位置計測を行う場合、高精度な位置計測を行うためには、通常のナビゲーション装置で用いられる位置計測とは異なり、多くのGPS衛星からの電波を短い周期で連続して受信する必要がある。
このため、走行路外の植樹帯や、ビル、防音壁等によって、自車両からみて車両上空を見渡せる範囲が狭くなったり、頭上を左右に横切る道路看板の支柱等が出現したりする場合には、GPS衛星からの電波が遮られるため、複数のGPS衛星からの電波を連続して受信することが困難となる。そして、場合によっては、高精度な位置計測を継続するのに十分なGPS測位を行うことができず、自車位置の計測が困難となり、このGPS測位により得た自車位置に基づいて行っている自動操舵を継続することができず、自動操舵が解除されてしまう場合がある。
【0005】
このような場合には、ドライバ自身で、手動操舵を開始する必要があるのか、或いは、自車両を停止させる必要があるのかを、瞬時に判断する必要がある。また、自律センサを用いて自動操舵を継続しつつ、自車両を停止させるようになっている場合であっても、走行路の道路形状によっては、停車するまでの間に、自車両と目標地点との間の誤差が拡大してしまい、目標とする位置で停止させようとしても、停止誤差が大きくなってしまうという問題がある。
【0006】
そこで、この発明は上記従来の未解決の問題点に着目してなされたものであり、自動操舵から手動操舵への切り換わりに際し、ドライバが、余裕をもって対処することを可能とする、GPSロストの予測方法、GPSロストの予測装置及びこれを用いた車両用走行制御装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明に係るGPSロストの予測方法は、自車両上空の予め設定したGPS受信エリアにおいて空が占める割合である開空率を前以って推定し、この推定した将来の開空率に基づいて、GPS衛星からの電波に基づく測位が不可となるGPSロストが生じるかどうかを判断し、例えば、開空率が低い場合には電波を受信することが困難としてGPSロストが生じると予測する。
【0008】
このとき、自車両前方の走行路を撮像した撮像画像上で、走行路上の予め設定した前方地点に相当する位置に、この前方地点でのGPS受信エリア、つまり、この前方地点に自車両が位置すると仮定したときのGPS受信エリアに相当する開空率検出領域を設定し、この開空率検出領域内の画像に基づき、前記前方地点での実際の開空率を推定し、これに基づいて、GPSロストが生じるかどうかを判断する。
【発明の効果】
【0009】
本発明に係るGPSロストの予測方法によれば、自車両前方の撮像画像上で、走行路上の予め設定した前方地点に相当する位置に、この前方地点でのGPS受信エリアに相当する開空率検出領域を設定し、この開空率検出領域内の画像に基づいて、前記前方地点における実際の開空率を推定するようにしたから、GPSロストが生じるかどうかを、前以って容易に検出することができ、GPSロストが生じることに対し、予め適切な対応を図ることができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施の形態を説明する。
まず、第1の実施の形態を説明する。
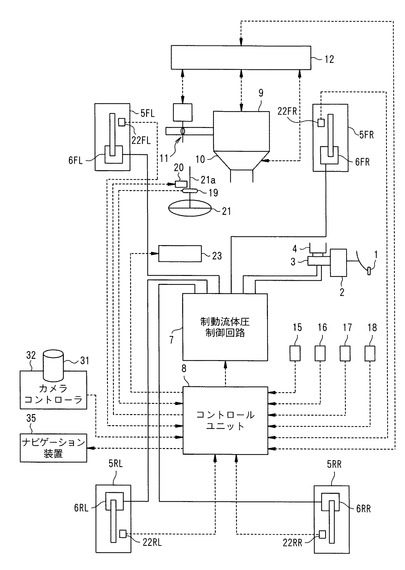
図1は、本発明を適用した自動操舵制御装置を搭載した車両の車両概略構成図である。
図1中の符号1はブレーキペダル、2はブースタ、3はマスタシリンダ、4はリザーバであり、通常は、ドライバによるブレーキペダル1の踏込み量に応じて、マスタシリンダ3で昇圧された制動流体圧が、各車輪5FL〜5RRの各ホイールシリンダ6FL〜6RRに供給されるようになっているが、このマスタシリンダ3と各ホイールシリンダ6FL〜6RRとの間には制動流体圧制御回路7が介挿されており、この制動流体圧制御回路7内で、各ホイールシリンダ6FL〜6RRの制動流体圧を個別に制御することも可能となっている。
【0011】
前記制動流体圧制御回路7は、例えばアンチスキッド制御やトラクション制御に用いられる制動流体圧制御回路を適用したものであり、この実施形態では、各ホイールシリンダ6FL〜6RRの制動流体圧を、単独で個別に増減圧することができるように構成され、例えば比例ソレノイド弁を使用することによって任意の制動流体圧に制御可能に構成されている。この制動流体圧制御回路7は、後述するコントロールユニット8からの制動流体圧指令値に応じて各ホイールシリンダ6FL〜6RRの制動流体圧を制御する。
【0012】
また、この車両には、エンジン9の運転状態、自動変速機10の選択変速比、並びにスロットルバルブ11のスロットル開度を制御することにより、駆動輪である後輪5RL、5RRへの駆動トルクを制御する駆動トルク制御ユニット12が設けられている。
エンジン9の運転状態制御は、例えば燃料噴射量や点火時期を制御することによって制御することができるし、同時にスロットル開度を制御することによっても制御することができる。
なお、この駆動トルク制御ユニット12は、単独で、駆動輪である後輪5RL、5RRの駆動トルクを制御することも可能であるが、前述したコントロールユニット8から駆動トルクの指令値が入力されたときには、その駆動トルク指令値を参照しながら駆動輪トルクを制御する。
【0013】
さらに、この車両には、自車両に発生する前後加速度Xg及び横加速度Ygを検出する加速度センサ15、自車両に発生するヨーレートφを検出するヨーレートセンサ16、前記マスタシリンダ3の出力圧、いわゆるマスタシリンダ圧Pmを検出するマスタシリンダ圧センサ17、アクセルペダルの踏込み量、すなわちアクセル開度Accを検出するアクセル開度センサ18、ステアリングホイール21の操舵角θを検出する操舵角センサ19、各車輪5FL〜5RRの回転速度、いわゆる車輪速度Vwi(i=FL〜RR)を検出する車輪速度センサ22FL〜22RRが備えられ、それらの検出信号は前記コントロールユニット8に出力される。また、駆動トルク制御ユニット12で制御された車輪軸上での駆動トルクTwも合わせてコントロールユニット8に出力される。
【0014】
なお、検出された車両の走行状態データに左右の方向性がある場合には、何れも左方向を正方向とし、右方向を負方向とする。すなわち、ヨーレートφや横加速度Yg、操舵角θは、左旋回時に正値となり、右旋回時に負値となる。
また、車両には、自車両前方に、前記コントロールユニット8で後述の減速制御が作動するようなカーブが存在する場合に、これをドライバに警告したり、またGPSロスト状態となると予測されるときこれを通知したりするための警報装置23が設けられている。この警報装置23は、音声やブザー音を発生するためのスピーカやモニタを含んで構成され、表示情報及び音声情報によって警告を発することにより、減速度やGPSロストの発生をドライバに通知するようになっている。
【0015】
また、ステアリングシャフト21aには、図示しないクラッチを介して転舵モータ20が設けられ、転舵モータ20の駆動力が前記クラッチを介してステアリングシャフト21aに伝達されることによって、ステアリングホイール21の操作とは別にステアリングシャフト21aが回動するように構成され、前記クラッチをオンオフすることにより前記転舵モータ20の駆動力の前記ステアリングシャフト21aへの伝達を断続させることができるようになっている。
【0016】
また、図中、31は、例えば、単眼カメラで構成される前方カメラ(撮像手段)であって、この前方カメラ31の撮像画像に基づき、カメラコントローラ32で、自車両前方の自車両と同じ走行車線を走行する前方車両を検出する。また、前記カメラコントローラ32は、前方カメラ31の撮像画像に基づいて自車両と並走する並走車両又は先行車両との間の前後方向の距離である縦距離Ypv、左右方向の距離である横距離Xpv及び、並走車両、先行車の車高Hpv等を検出する。
【0017】
さらに車両には、GPS測位を行って自車両の現在位置を計測し、自車両周辺の道路地図情報を表示するナビゲーション装置35が搭載され、このナビゲーション装置35は、公知のナビゲーション装置と同様に構成され、GPS衛星からの電波を受信しこれに基づいて自車両の現在位置を計測する測位部、道路地図情報を記憶する記憶部、測位部で計測した自車両の現在位置周辺の道路地図情報を前記記憶部から抽出しこれを表示すると共に、コントロールユニット8に、自車両の現在位置及び自車両前方の予め設定した所定範囲内の道路地図情報を出力する表示処理部、等を備えている。
【0018】
前記コントロールユニット8は、これら各種センサ及びナビゲーション装置35でGPS測位により検出した自車両の現在位置情報をもとに、自動操舵制御を行い、自車両が目標とする走行経路に沿って走行するように、公知の手順で前記操舵モータ20を駆動制御して自動操舵を行う。また、前記ナビゲーション装置35でのGPS測位が不可となるGPSロスト状態となったときには、例えばGPSロスト状態となる直前の自車両の現在位置を初期値として公知のデッドレコニングにより自車両の現在位置を推定しこれに基づいて自動操舵を継続すると共に、この間、ドライバに間もなく手動操舵に移行することを通知し、所定時間が経過したとき自動操舵を終了する。
【0019】
また、ナビゲーション装置35においてGPSロスト状態となるかどうかを予測するロスト予測処理を実行し、GPSロスト状態となると予測されるときには、GPSロスト状態となることを、前以って通知する。
また、コントロールユニット8は、前記制動流体圧制御回路7や前記駆動トルク制御ユニット12、また、前記アクセルペダルに設けられ、且つアクセルペダルの踏込みが行われたときの反力を制御するための図示しない反力制御装置を制御し、自車両のアクセルペダルやブレーキペダルの踏込み操作に関わらず自車両の加減測度を調整し、自車両の走行状態を制御可能に構成されている。
【0020】
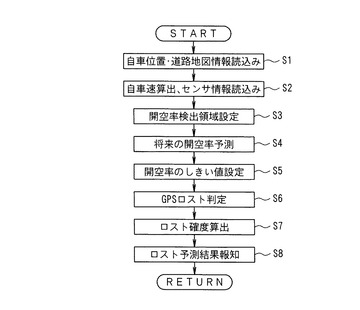
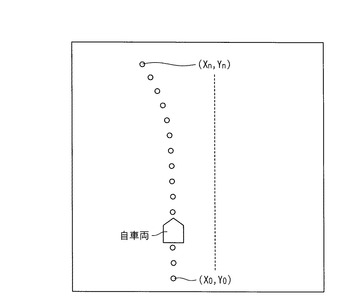
図2は、前記コントロールユニット8で実行されるロスト予測処理の処理手順の一例を示すフローチャートである。
このロスト予測処理では、まず、ナビゲーション装置35から、自車両の現在位置(Xown,Yown)及び、自車両前方の所定領域の道路地図情報を読み込み、道路地図情報を構成するノードデータ(X、Y)のうち、図3に示すように、自車位置(Xown,Yown)を基準とし前後に所定距離だけとった範囲(X0,Y0)〜(Xn,Yn)を常時バッファに保有する。ここで、前方側の距離は、後述の開空率検出領域Adを設定するのに十分な距離に設定され、例えば、自車速Vownに所定時間tαを乗じた値(=Vown・tα)、又は、この自車速Vownと所定時間tαとの乗算値及び予め設定した規定値との何れか大きい方に設定する。また、ナビゲーション装置35から読み込んだノードデータ(X,Y)に付随する、このノード地点を走行する際の標準走行車速Vnormを読み込む(ステップS1)。
【0021】
次いで、ステップS2に移行し、各種センサから出力される各車輪速Vfl〜Vrr、前後加速度Xg、横加速度Yg、ヨーレートφ等を読み込む。また、各車輪速Vfl〜Vrrの平均値から自車速Vownを算出する。
次いで、ステップS3に移行し、前方カメラ31で撮像した撮像画像に対し、開空率検出領域Adを設定する。この開空率検出領域Adは、所定の前方地点での、空が見える割合を表す前方開空率を検出するための検出対象領域である。
【0022】
ここで、開空率は、前記ナビゲーション装置35において、GPS衛星からの電波を受信する対象エリアとして設定されている自車両上空のGPS受信エリアにおいて、GPS衛星からの電波の取得に影響を及ぼす遮蔽物のない、空の占める割合を表す。そして、前記前方開空率とは、前方地点での開空率を表し、前記開空率検出領域Adは、前方地点における前記GPS受信エリアを後方からみたときのエリアに相当する領域である。
【0023】
この開空率検出領域Adの設定方法は、次の第1の設定方法から第4の設定方法の何れかを採用することができる。
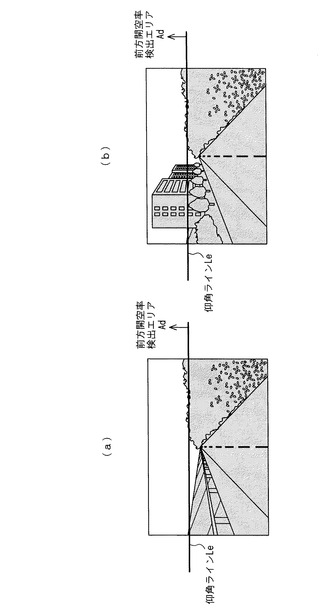
開空率検出領域Adの第1の設定方法は、図4(a)及び図4(b)に示すように、前方カメラ31の撮像画像において、自車両が、自車両の走行経路上の前方の地点であって、現在位置から所定の距離(以後、経路上前方距離ともいう。)だけ前方の地点に位置するときの所定の仰角高さに相当する位置に、水平方向に仰角ラインLeを設定し、この仰角ラインLeよりも上の部分を、前記開空率検出領域Adとする。
【0024】
前記経路上前方距離は、例えば、前方注視点距離に相当する値に設定される。また、前記仰角高さは、ナビゲーション装置35において、GPS測位に用いるGPS衛星の高度に相当する仰角相当の値に設定され、例えば、ナビゲーション装置35の測位部において、電波の受信をマスクする角度、すなわち、ナビゲーション装置35において、所定の仰角以上に位置するGPS衛星のみからの電波を計測対象とし、所定の仰角よりも低いGPS衛星からの電波を受信しないようにするための仰角を適用してもよい。
【0025】
なお、図4(a)は、自車両前方に、ナビゲーション装置35において、GPS衛星からの電波の受信を困難とする、高いビル等の遮蔽物がない場合の撮像画像を表し、図4(b)は、遮蔽物がある場合の撮像画像を表す。
このように、GPS衛星からの電波を的確に受信することの可能な仰角に応じた仰角ラインLeを設定し、この仰角ラインLeよりも上の領域を、開空率検出領域Adとして設定することによって、実際にはGPS衛星からの電波の受信を行わない不要な領域、つまり、比較的低い領域が、開空率検出領域Adに含まれることを回避することができ、実際のGPS受信エリアに則した開空率検出領域Adを設定することができる。
【0026】
次に、開空率検出領域Adの第2の設定方法を説明する。
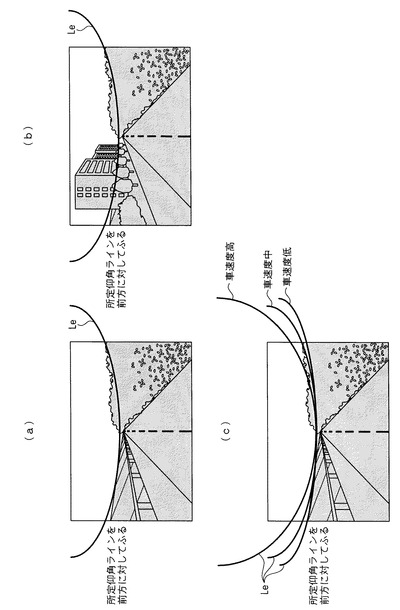
この第2の設定方法は、図5(a)及び図5(b)に示すように、撮像画像の横方向中央を基準として左右が上方向に湾曲する仰角ラインLeを設定し、仰角ラインLeよりも上の領域を、開空率検出領域Adとする。
つまり、撮像画像において両側の部分は、自車両に比較的近い領域であって比較的早い時点で通過する領域である。そこで、将来空を遮蔽する物体が存在する領域に重点をおくため、図5(a)、図5(b)に示すように、撮像画像においてその両側の部分を含まないように、左右が上方に湾曲した仰角ラインLeを設定する。
【0027】
このように、開空率検出領域Adの左右の領域を狭くすることによって、実際のGPS受信エリアに則した開空率検出領域Adを設定することができる。
なお、自車両に比較的近い領域である両側の部分は、自車両の車速が高いときほど、より早い時点で通過する領域となるから、図5(c)に示すように、自車速が高いときほど、仰角ラインLeの上方への湾曲度合がより大きくなるように、仰角ラインLeを設定してもよい。このように車速に応じて仰角ラインLeを設定することによって、実際の走行状態に応じてより的確に開空率検出領域Adを設定することができる。
【0028】
次に、開空率検出領域Adの第3の設定方法を説明する。
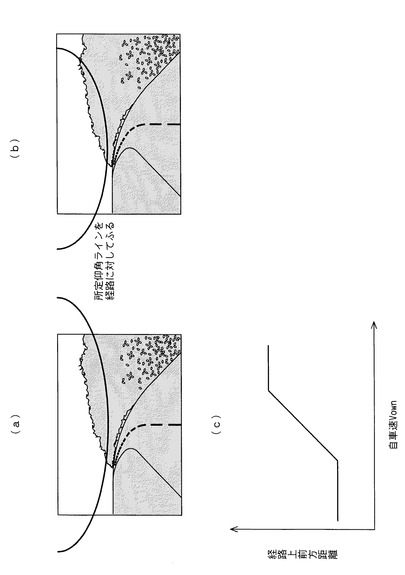
この第3の設定方法は、図6(a)に示すように、前記第2の設定方法にしたがって設定した仰角ラインLeを、図6(b)に示すように、自車両の将来の経路に沿って左右にずらすようにしたものである。前記自車両の将来の経路は、例えば、ナビゲーション装置35からの道路地図情報に基づいて取得するようにしてもよく、また、前方カメラ31の撮像画像から道路白線を抽出しこれに基づいて検出するようにしてもよい(走行経路検出手段)。そして、このようにして取得した将来の経路に基づき、撮像画像において、自車両の走行経路上の、現在位置から経路上前方距離だけ前方の前方地点(例えば、前方注視点)に、前記仰角ラインLeの中心がくるように設定する。
【0029】
なお、前記前方地点を決定する経路上前方距離は、前方注視点距離を設定してもよく、また、図6(c)に示すように、自車速Vownに応じて変更してもよい。具体的には、自車速Vownが比較的低い領域では、経路上前方距離は比較的小さい値に設定され、自車速Vownが増加するとこれに比例して経路上前方距離も増加し、自車速Vownが比較的高い領域では、経路上前方距離は比較的長い値に設定される。つまり、自車両が高速走行するときほど、経路上前方距離だけ前方の地点に、自車両が実際に到達するまでの所用時間は短い。したがって、自車両が高速であるときほど経路上前方距離をより長い値に設定し、より遠くの空を開空率検出領域Adとして設定することによって、自車両が経路上前方距離だけ前方の地点に到達したときに、実際にはGPS衛星の受信に影響を及ぼさない領域が開空率検出領域Adとして設定されることを回避し、実際に則したより的確な範囲を開空率検出領域Adとして設定することができる。
【0030】
次に、開空率検出領域Adの第4の設定方法を説明する。
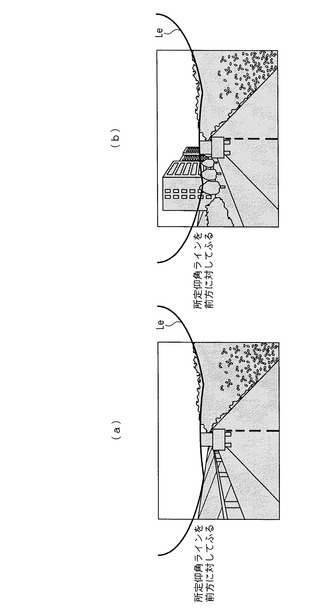
この第4の設定方法は、開空率検出領域Adの第2の設定方法又は第3の設定方法により設定した仰角ラインLeに対し、移動障害物を自車両の前方の所定距離の範囲内に検出したときには、図7(a)及び図7(b)に示すように、その移動障害物が、開空率検出領域Ad外となるように、仰角ラインLeの形状を補正する。なお、仰角ラインLeの補正の対象となる移動障害物は、自車両が走行中のレーン内にあるもののみを対象とし、並走する他レーンを走行中の場合には、将来自車両の横側の遮蔽物となり得るため、開空率検出領域Ad内の物体として扱うようにしてもよい。
なお、前記移動障害物は、例えば、前方カメラ31の撮像画像において、物体の移動状況から、移動障害物であるかどうかを、公知の手順で判断すればよい(移動物体検出手段)。
【0031】
以上説明した、第1から第4の設定方法の何れかによって、開空率検出領域Adを設定したならば、ステップS4に移行し、将来の開空率Rsfを予測する。
この将来の開空率Rsfは、次の第1から第3の予測方法の何れかによって予測する。
まず、将来の開空率Rsfの第1の予測方法は、将来の開空率Rsfが、前方カメラ31の撮像画像から得られる現時点における前方の開空率Rsnowと一致すると仮定して予測する方法である。
【0032】
具体的には、前記ステップS3で設定した開空率検出領域Ad内において、撮像画像から得られる空に相当する領域Asが占める割合(=空の領域Asの面積(空面積)/開空率検出領域Adの面積)を算出し、これを前方開空率Rsnowとする(前方開空率推定手段)。
そして、この前方開空率Rsnowを、将来の開空率Rsfとする。
【0033】
前記開空率検出領域Ad内における空の領域Asは、次の手順で算出する。
まず、撮像画像の開空率検出領域Adにおいて、同色又は同輝度の領域を検出し、最も大きい面積を占める領域の中で、青或いは白に相当する輝度の部分を抽出し、これを空に相当する領域とみなし、その全合計面積を、空面積すなわち空の領域Asとする。
なお、空と同色の建物を排除するために、開空率検出領域Adに対してオプティカルフロー処理を施し、オプティカルフローが所定値以上となる部分は、空に相当する部分ではないと判断し、この部分は、空面積に加算しないようにしてもよい。
【0034】
また空の領域Asの検出にあたっては、図8に示すように、自車両が走行する走行路沿いの建物の高度情報と建物の密集度合情報とを獲得し、この建物が存在する部分については、撮像画像において非空領域として扱うようにしてもよい。
具体的には、前記建物の高度情報と密集度合情報とを、例えばナビゲーション装置35のノード情報に含ませる(遮蔽物体情報獲得手段)。そして、このノード情報を参照することによって、道路沿いの建物の高度情報及びその密集度合を獲得する。
【0035】
次に、高度情報に基づいて各建物の高度の平均値を正規化し、高度が高いときほど“1”に近づくように“0〜1”の値で表すと共に、密集度合を正規化し、密集しているときほど“1”に近づくように、 “0〜1”の値で表す。そして、これら正規化した高度情報及び密集度合を乗算すると共に所定のゲインを乗算し、これを遮蔽物体線Liの角度αとする。
【0036】
次に、撮像画像において、経路上前方距離だけ前方の地点に相当する位置に、自車両がこの地点に位置する場合の前記所定仰角の高さに相当する位置を基点とし、前記角度αを有する直線を設定し、これを遮蔽物体線Liとする。つまり、遮蔽物体線Liは、仰角ラインLeと、経路上前方距離だけ前方の地点に相当する位置で交差しこの位置を起点とする直線となる。
【0037】
そして、撮像画像において、仰角ラインLeよりも上の領域であり、且つ遮蔽物体線Liよりも上の領域を、空の領域Asの検出対象領域とする。前記遮蔽物体線Liの角度αは、高度情報及び密集度合に応じて設定され、建物の平均高度が高いときほど角度αは大きくなり、また、密集しているときほど角度αは大きくなるから、図8に示すように、平均高度が高いときほど、また密集度合が高いときほど遮蔽物体線Liの傾きが大きくなって、空領域Asの検出対象領域は狭くなり、結果として、空領域Asが狭くなって、建物がGPS衛星の電波の取得に与える影響を考慮して空領域Asを、実際に則して設定することができる。
【0038】
このとき、前記建物が、自車両の走行路よりも離れた地点に位置するときほど、この建物が、ナビゲーション装置35におけるGPS衛星からの電波の受信に与える影響は小さいことから、例えば、走行路から建物までの横方向の距離情報或いは、走行路と建物との間に歩道があるか、或いは、自車両が中央よりの走行車線を走行しており自車両の右側或いは左側に他の車線があるかどうか等といった横方向の位置情報を、ナビゲーション装置35の道路地図情報等から獲得し、横方向の距離に応じて遮蔽物体線Liの角度αを補正するようにしてもよい。つまり、横方向の距離が長いときほど、この建物がGPS衛星からの電波の受信に与える影響は小さいことから、角度αが小さくなるように補正してもよい。このようにすることによって、建物が自車両のGPS衛星の電波の受信に与える実際の影響に則して遮蔽物体線Liを設定することができ、より実際に則した空領域Asを算出することができる。
【0039】
このように、将来の開空率Rsfの第1の予測方法は、現時点で検出した前方開空率Rsnowを将来の開空率Rsfとして設定するようにしたから、将来の開空率Rsfを複雑な演算を伴うことなく容易に検出することができる。
また、このとき、現時点における前方開空率Rsnowを、将来の開空率Rsfとして用いた場合、道路脇の建物等といった遮蔽物が存在する場合、その高さや配置位置によっては、自車両がこれら遮蔽物に実際に近づいた場合、場合によっては開空率が低下する場合があるが、前述のように、走行路脇の建物等の存在状況に応じて将来の開空率Rsfを補正しているから、現時点で検出した前方開空率Rsnowを将来の開空率Rsfとして用いることによる将来の開空率Rsfの精度の低下を抑制することができる。
なお、ここでは、建物の高さや密集度に応じて将来の開空率Rsfを補正する場合について説明したが、これに限るものではなく、例えば、比較的高さのある防音壁等といった、ナビゲーション装置35でのGPS衛星からの電波の取得に影響を及ぼすような遮蔽物の存在を考慮して補正することも可能である。
【0040】
次に、将来の開空率Rsfの第2の予測方法を説明する。
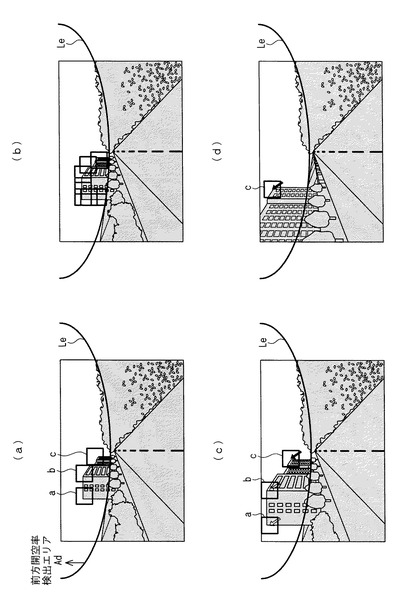
この第2の予測方法は、図9に示すように、空ではない領域の特徴点がどのように推移するかを予測することによって、将来の開空率Rsfを予測する方法である。
具体的には、まず、撮像画像上に設定した開空率検出領域Adについて、空の領域Asとそうではない領域とを分離する。これは、将来の開空率Rsfの第1の予測方法で空の領域Asを検出した場合と同様の手順で行う。
【0041】
次に、図9(a)に示すように、開空率検出領域Ad内の、空の領域Asではない部分について、その領域を特定することの可能な特徴点に対してテンプレートを付与する。
例えば、図9(a)では、撮像画像の非空領域中の物体(ビル)の角部分を特徴点とし、これに対して3つのテンプレートa、b、cを設定している。このテンプレートは必ずしも角に対して設定する必要はなく、例えば、図9(b)に示すように、空の領域と非空領域との境界に配置してもよい。要は、非空領域である領域を特定することの可能な部分を前記特徴点として設定すればよい。
【0042】
このようにして、テンプレートを配置したならば、撮像情報の各読み込み時点における撮像画像において、図9(a)、図9(c)、図9(d)に示すように、撮像画像間で、前記テンプレートの推移を追い、その推移状況を検出する。すなわち、単位時間当たりのテンプレートの移動量と、単位時間当たりに自車両が進む距離(自車速Vownに基づいて算出)とを検出する。
【0043】
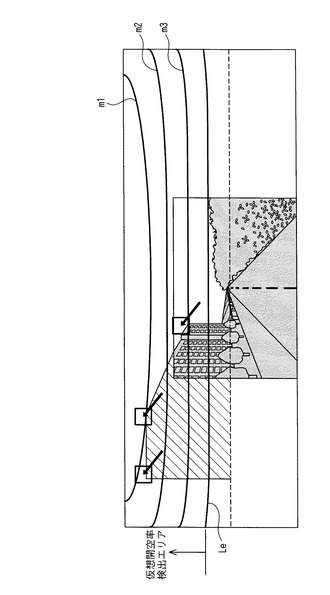
次に、図10に示すように、開空率検出領域Adを、自車両の現在位置でのGPS受信エリア相当の領域に拡大したと想定した、予め設定した大きさの拡大画像を設定する。
なお、図10において、破線は前方注視点を通るラインを表し、実線は後述の仰角ラインLeを表す。また、ラインm1、m2、m3は、例えば10度、20度、30度の仰角に相当するラインを表す。
【0044】
そして、この拡大画像において上記と同様の手順で仰角ラインLeを設定し、この仰角ラインLeよりも上の領域を仮想開空率検出領域とする。また、この仮想開空率検出領域の面積を求める。
そして、前記テンプレートの推移状況で特定される単位時間当たりのテンプレートの移動量と、現時点における自車速Vownとに基づいて、所定時間Δt後におけるテンプレートの位置を予測し、テンプレートの位置から、仮想開空率検出領域内の非空領域を特定し、その面積を算出する。
【0045】
そして、仮想開空率検出領域内の非空領域の面積を、仮想開空率検出領域の面積から差し引いて、仮想開空率検出領域内の空の領域の面積を算出し、この空の領域が、仮想開空率検出領域において占める割合を算出する(=空の領域の面積/仮想開空率検出領域の面積)。
これによって、所定時間Δt後の、開空率が算出されることになる。
この処理を、繰り返し行って現時点以後、所定時間Δt毎に各時点における開空率を予測し、自車両が前記経路上前方距離だけ前方の地点に到達するのに要する所要時間後までの開空率をΔt毎に算出する。これによって、自車両が前記経路上前方距離だけ前方の地点に到達するまでの所定時間Δt毎の開空率が時系列で算出されることになる。
【0046】
そして、自車両が前記経路上前方距離だけ前方の地点に到達するまでに要する所要時間後での、仮想開空率検出領域内の空の領域は、前記空の領域の推移状況から未来の空の領域を予測したものであるから、自車両が前記前方の地点に実際に位置するときに、その上空のGPS受信エリアを撮像した場合の撮像画像における、GPS受信エリアに相当する領域内の空の領域と同等とみなすことができる。
したがって、この自車両が前記経路上前方距離だけ前方の地点に到達するまでに要する所要時間後に相当する開空率を、将来の開空率Rsfとする。
【0047】
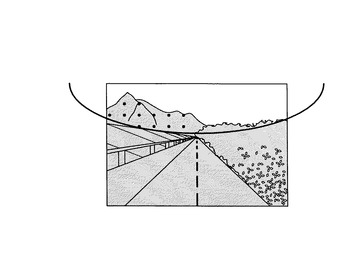
このように、非空領域の特徴点の推移状況から、非空領域の推移を予測して空領域の推移状況を推測し、これに基づいて、将来の開空率Rsfを算出するようにしたから、より実際に則した開空率Rsfを算出することができる。また、テンプレートを設定した特徴点の推移状況から非空領域を推測し、これに基づいて将来の開空率Rsfを推定しているから、例えば図11に示すように、遠方に位置する山等、相当時間がたたないと影響を及ぼすことのない遮蔽物の影響を正しく予測することができる。
【0048】
ここで、GPS衛星が多数存在する領域と、遮蔽される領域すなわち非空領域とが重なる場合には、ナビゲーション装置35におけるGPS衛星からの電波の受信に影響を及ぼすことから、上空のGPS衛星の配置が既知である場合には、GPS衛星が多数存在する領域と、非空領域とが重なるか否かに応じて、上述のようにして予測した将来の開空率Rsfを補正するようにしてもよい。
【0049】
例えば、図12(a)に示すように、図10に示す仮想的な拡大画像において、仰角ラインLeよりも上の仮想開空率検出領域を、3つの領域に分割する。なお、この領域は、例えば、図12(b)に示すように、自車両の左側方に相当するエリア、自車両の前方に相当するエリア、自車両の右側方に相当するエリアに対応する。
【0050】
そして、GPS衛星の位置情報から各エリアに含まれるGPS衛星の配置状況を検出し、各領域について、GPS衛星の分布状況を、粗、中、密の3段階に設定する。また、各エリアの遮蔽物体の存在状況から、各エリアについて遮蔽物体によりうける影響の度合を、小、中、大の3段階に設定する。前記GPS衛星の配置状況は、例えば、ナビゲーション装置35の道路地図情報として予め設定しておき、ナビゲーション装置35から、自車両の現在位置周辺におけるGPS配置状況を獲得するようにすればよい(GPS衛星配置状況検出手段)。
【0051】
そして、例えば、エリア内にGPS衛星が5つ以上あるときには“密”、3〜4個の場合には“中”、0から2個の場合には“粗”として設定する。また、前記遮蔽物体によりうける影響の度合は、仮想的な拡大画像の仮想開空率検出領域における開空率、すなわち将来の開空率Rsfに対する、各エリアに対応する領域での開空率Rsfn(=Rsfn/Rsf)に基づいて算出し、これらの比が140%以上であるときには、影響は“大”、60%より大きく140%未満であるときには影響は“中”、60%以下であるときには影響は“小”と判断する。
【0052】
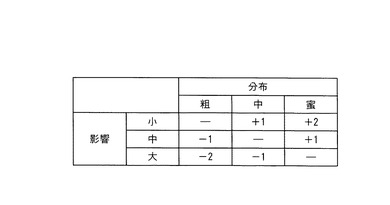
そして、遮蔽物体の存在状況及びGPS衛星の分布状況がナビゲーション装置35においてGPS衛星からの電波の受信に対してどのように影響を与えるか、つまり、GPS衛星からの電波を取得しやすい方向に作用するのか、或いは電波を取得しにくい方向に作用するのかを判断しその判断結果に応じて、将来の開空率Rsfの補正度合を設定する。
【0053】
この補正度合は、例えば図13に示すような補正マップに基づいて設定する。図13において、GPS衛星の分布が粗い場合には、遮蔽物体により受ける影響が“小”であれば補正なしとして設定され、遮蔽物体により受ける影響が“中”であれば補正度合は“−1”として設定され、“大”であれば“−2”として設定される。また、GPS衛星の分布が中程度である場合には、遮蔽物体により受ける影響が“小”であれば“+1”、“大”であれば“−1”、“中”であれば補正なしとして設定される。また、GPS衛星の分布が密である場合には、遮蔽物体によりうける影響が“小”であるときには“+2”、“中”であれば“+1”、そして、遮蔽物体によりうける影響が“大”であるときには補正なしとして設定される。
【0054】
そして、このようにして各領域について、補正度合を決定したならば、各領域の補正度合を加減算し、加減算結果が正値ならばその数に応じて将来の開空率Rsfを上方補正し、負値ならばその数に応じて将来の開空率Rsfを下方補正する。
このように、GPS衛星の配置状況と遮蔽物体の存在状況とによって、GPS衛星の電波の受信状況に与える影響を考慮して、将来の開空率Rsfを補正するから、より実際に則した開空率Rsfを得ることができる。
【0055】
なお、ここでは、前記拡大画像を設定し、拡大画像における仮想開空率検出領域において将来の非空領域を予測し、これに基づいて仮想開空率検出領域において空の領域が占める割合を検出し将来の開空率Rsfとするようにした場合について説明したが、多少精度は低下するものの、例えば、前方カメラ31により得られた撮像画像の範囲内、つまり、開空率検出領域において将来の非空領域を予測し、これに基づいて開空率検出領域において空の領域が占める割合を算出しこれを将来の開空率Rsfとして用いるようにしてもよい。
【0056】
次に、将来の開空率Rsfの第3の予測方法を説明する。
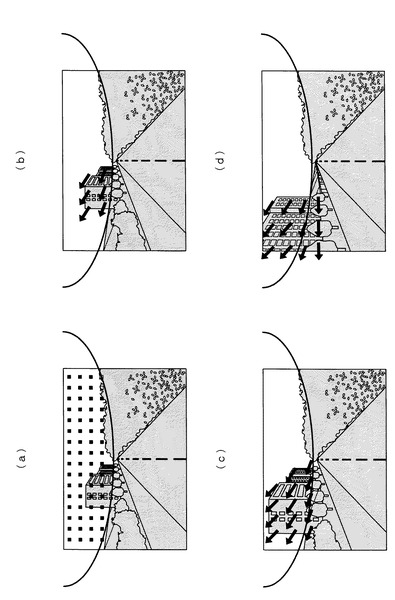
この第3の予測方法は、撮像画像において非空領域がどのように推移するかを、非空領域のオプティカルフロー推移から予測するものである。
まず、上記第1の予測方法と同様の手順で、撮像画像の開空率検出領域Adにおいて、空の領域と非空領域とを分離する。
【0057】
次に、図14(a)に示すように、非空領域の遮蔽物体のオプティカルフローを検出するための検出点を、開空率検出領域Adに対して分布する。なお、このオプティカルフローの検出は、例えば画像処理ボードに予め内蔵しておいたオプティカルフロー処理を用いて行うようにしてもよく、また、ソフトウェア的な処理によって検出するようにしてもよい。また、ソフトウェア的な処理によって検出する場合には、非空領域として検出した部分に対してのみ検出点を設定しオプティカルフロー処理を行うようにしてもよい。
【0058】
このようにして検出点を設定したならば、図14(a)、図14(b)、図14(c)、図14(d)に示すように、各読み込み時点での撮像画像について、非空領域の遮蔽物体に対応する検出点のオプティカルフローを検出することで、遮蔽物体の推移を検出する。そして、この場合も、図15に示すように、撮像画像を予め設定した大きさに拡大した仮想的な拡大画像を想定し、テンプレートを設定した場合と同様の手順で、オプティカルフローに基づいて、仮想的な拡大画像における非空領域の面積を算出し、上記と同様に、現時点以後、所定時間Δt毎の、開空率を推測し、自車両が前記経路上前方距離だけ前方の地点に達するのに要する所要時間後までの、開空率を算出する。これによって、この場合も、所定時間Δt毎の開空率が時系列に算出されることになる。そして、自車両が前記経路上前方距離だけ前方の地点に到達するのに要する所要時間後に相当する開空率を、将来の開空率Rsfとする。
【0059】
このようにオプティカルフローを用いて、開空率を予測することによって、例えば、図16に示すように、自車両に対して相当時間がたたないと影響を及ぼすことのない山等の遠方の遮蔽物体の影響を正しく予測することができると共に、開空率が将来どのように低下していくのかを、時系列的に予測することができる。
なお、この第3の予測方法を用いる場合も、前述と同様の手順で、GPS衛星の配置状況に応じて開空率Rsfを補正するようにしてもよい。また、この場合も、開空率検出領域の範囲内で、将来の開空率Rsfを算出することも可能である。
【0060】
そして、このようにして、上記第1から第3の予測方法の何れかを用いて将来の開空率Rsfを予測したならば、ステップS5に移行し、GPS衛星からの電波の取得が困難となるGPSロスト状態となると判断するための、将来の開空率Rsfのしきい値を設定する。これは例えば、予め設定した値をしきい値として設定すればよい。
続いて、ステップS6に移行し、ステップS5で設定した開空率Rsfのしきい値Rsθと、ステップS4で算出した将来の開空率Rsf、つまり、自車両が経路上前方距離だけ前方の地点に到達したときの開空率Rsfとを比較し、GPSロスト状態となるかどうかを予測する。すなわち、将来の開空率Rsfがそのしきい値Rsθよりも大きいときには、GPSロストとはならないと判断し、将来の開空率Rsfがそのしきい値Rsθ以下の場合にはGPSロストとなると判断する。
【0061】
なお、将来の開空率Rsfを算出する際に、将来の開空率Rsfの時系列的な予測値を得ることが可能な、前記第2の方法或いは第3の方法により将来の開空率Rsfを算出した場合には、時系列的な予測値が、将来の何れかの時点でしきい値Rsθ以下となったときに、GPSロストとなると判定するようにしてもよい。また、この場合には、GPSロストとなったときの時間から、GPSロストが生じる時間を予測するようにしてもよい。
【0062】
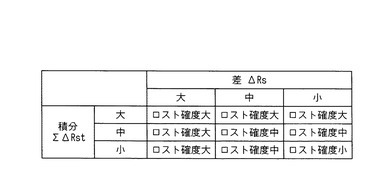
このようにして、GPSロスト状態となるかどうかを予測したならば、ステップS7に移行し、GPSロストとなるロスト確度Plを算出する。このロスト確度Plは、前記ステップS6で、GPSロスト状態となると予測されるとき、次の2つの状態変数の関係から、ロスト確度Plを、大、中、小の3段階のいずれかに設定する。
前記状態変数としては、将来の開空率Rsfとその閾値Rsθとの差ΔRsの絶対値と、時系列に算出される所定時間Δt毎の開空率の予測値において、開空率がしきい値Rsθ以下となるときの、開空率としきい値Rsθとの差ΔRstの積算値ΣΔRstとを用いる。
【0063】
そして、将来の開空率Rsfとその閾値Rsθとの差ΔRsの絶対値の大きさに応じて、差ΔRsを“大、中、小”の三段階に分類し、また、前記積算値ΣΔRstの大きさに応じて、積算値ΣΔRstを“大、中、小”の三段階に分類する。そして、図17のロスト確度マップに示すように、差ΔRsの絶対値が“大”であるとき、また、積分値ΣΔRstが“大”であるときには、他方の大きさに関わらず、ロスト確度Plは“大”と判断する。また、差ΔRsが“中”であるときには、積分値ΣΔRstが“中”、又は“小”であるときロスト確度Plは“中”と判断する。そして、差ΔRsの絶対値が“小”であるときには、積分値ΣΔRstが“中”のときにはロスト確度Plは“中”、積分値ΣΔRstが“小”のときにはロスト確度Plも“小”と判断する。
【0064】
そして、ステップS8に移行し、ステップS6でGPSロストが生じると予測されるときには、警報装置23を作動し、ドライバに対してGPSロストが生じることを通知する。また、ロスト確度Plを算出した場合にはこれも通知する。
このように単にGPSロストが生じるかどうかだけでなく、そのロスト確度Plも通知することによって、ドライバはロスト確度Plに応じて対応することが可能となる。
【0065】
また、将来の開空率Rsfを時系列的に算出しており、GPSロストとなるまでの時間を予測することができる場合には、GPSロストとなるまでの予測時間が短いときほど、警報の強度や頻度を高めること等によって、GPSロストとなる状態が近いことを通知するようにしてもよい。
また、GPSロストとなる確度Plに応じて、ドライバがその後の対応をしやすいように、ランプの色やブザーの音質、音声の内容を変更するようにしてもよい。
このように、将来の開空率Rsfに応じて、GPSロスト状態となるかどうかを予測し、GPSロスト状態となると予測されるときには、これがドライバに通知される。
【0066】
したがって、自動操舵制御処理によって、GPS測位により得た自車両の現在位置に基づいて目標とする走行経路に沿って自動操舵制御が行われ、ドライバのステアリングホイールの操作に関わらず自動操舵が行われている状態で、GPSロスト状態となると、所定期間デッドレコニングによって自動操舵が継続された後、手動操舵に切り換わることになるが、自車両が実際にGPSロスト状態となる前に、GPSロスト状態となることがドライバに対して前以って通知されるから、GPSロスト状態となり手動操舵に切り換わった場合であっても、ドライバは、手動操舵に対して、余裕を持って対処することができ、安全性をより向上させることができる。
【0067】
また、このとき、前述のように、将来の開空率Rsfの算出に用いる開空率検出領域Adを第1から第4の設定方法の何れかを用いて設定するようにしているから、GPS衛星からの電波の受信に関与しない領域が開空率検出領域Adに含まれることを抑制し的確な開空率検出領域Adを設定することができると共に、このようにして設定した実際に則した開空率検出領域Adを用いて、第1から第3の予測方法の何れかの方法によって将来の開空率Rsfを算出しているから、実際の開空率に則したより的確な開空率Rsfを予測することができる。したがってこのようにして算出した開空率Rsfを用いてGPSロスト状態の予測を行うことによって、的確な予測を行うことができる。
【0068】
なお、第1の実施の形態において、図2のステップS2で自車速Vownを算出する処理が車速検出手段に対応し、ステップS3の処理が開空率検出領域設定手段に対応し、ステップS4の処理が将来開空率推定手段に対応し、ステップS6の処理がGPSロスト推定手段に対応し、ステップS7の処理が確度検出手段に対応し、ステップS8の処理がロスト通知手段に対応している。
【0069】
次に、本発明の第2の実施の形態を説明する。
この第2の実施の形態は、上記第1の実施の形態における自動操舵制御装置において、GPSロスト状態に移行すると予測されるときには、自車両を減速させるようにしたものであって、基本的な構成は上記第1の実施の形態と同様であるので、同一部の詳細な説明は省略する。
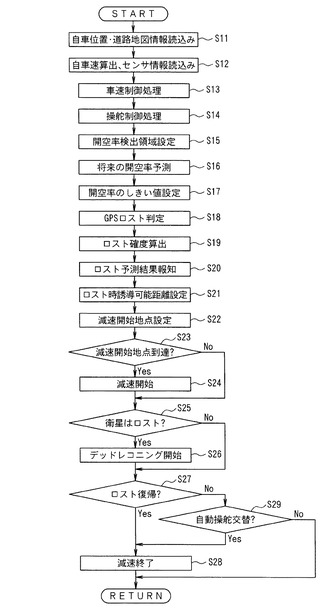
図18は、第2の実施の形態において実行される演算処理の処理手順の一例を示すフローチャートである。この演算処理は、例えば予め設定した所定周期で実行される。
図18のステップS11及びステップS12の処理は、上記第1の実施の形態における図2のステップS1及びステップS2の処理と同様であって、ナビゲーション装置35から所定の道路地図情報や自車両の現在位置情報を読み込むと共に、各種センサからの検出信号を読み込み、自車速Vownを算出する。
【0070】
次いで、ステップS13に移行し、目標走行車速を設定する。この目標走行車速は、自車速Vownを標準走行車速Vnormに制御し得る値に設定する。そして、自車速Vownが目標走行車速となるように、駆動トルク制御ユニット12や制動流体圧制御回路7を制御し、駆動力或いは制動力を発生させて自車両が目標走行車速となるように車速制御を行う。
なお、後段のステップS24の処理で設定される減速フラグFsdを参照し、これが“1”であって減速制御中であることを表す場合には、ステップS22の処理で設定される車速パターンにしたがって公知の手順で減速制御を行う。
【0071】
次いで、ステップS14に移行し、公知の手順で自動操舵制御処理を行う。すなわち、ナビゲーション装置35からの、GPS測位によって得た自車両の現在位置情報に基づいて、自車両が目標とする経路に沿って走行するように、転舵モータ20を駆動制御し操舵制御を行う。また、GPS測位が不可となり、後述のステップS26でデッドレコニングにより自車両の現在位置を推測している場合にはこのデッドレコニングにより推定し所定の記憶領域に格納している現在位置推定値に基づいて操舵制御を行う。
【0072】
次いで、ステップS15に移行する。このステップS15からステップS20の処理は、前記図2のステップS3からステップS8の処理と同様であって、将来の開空率Rsfを推測し、ロスト確度Plを推定し、これに基づいてGPSロスト状態となるかどうかを判定し、GPSロスト状態となるときにはドライバに対してこれを通知する。なお、GPSロスト状態となることのドライバへの通知は、後述のステップS24の処理での減速度の発生をもってして行うようにしてもよい。
【0073】
次いで、ステップS21に移行し、ロスト時誘導可能距離を設定する。このロスト時誘導可能距離は、走行中の道路の前方のカーブ状況から、GPSロスト状態が継続しデッドレコニングにより自車両の現在位置を推測しこれに基づき自動操舵を行った際に、目標経路と自車両の現在位置との位置誤差が許容範囲を保った状態で自車両を停止に導くことの可能な距離である。このロスト時誘導可能距離は、例えば、直線の場合には例えば70〔m〕程度に設定し、カーブ路の場合には、カーブ路半径が中程度の場合には50〔m〕程度、カーブ路半径が小さい場合には30〔m〕程度に設定する。なお、走行中の道路のカーブ状況は、ナビゲーション装置35から獲得すればよい。
【0074】
次いで、ステップS22に移行し、自車両を、現在位置から、ステップS21で設定したロスト時誘導可能距離だけ先の地点で停止させるために必要な車速パターンを設定し、この車速パターンに沿って自車両を減速させる際の、減速開始点を逆算して算出する。
なお、停止するまでの車速パターンは、例えば、予め設定した減速度(例えば、0.2G)として設定しておけばよい。
【0075】
次いで、ステップS23に移行し、自車両がステップS22で設定した減速開始点に到達したかどうかを判断し、減速開始点に到達していなければステップS25に移行する。また、ステップS20でロスト状態に移行すると予測されないときにも減速開始点に到達していないと判断しステップS25に移行する。
一方、減速開始点に到達していれば、ステップS24に移行し、車速の減速制御の開始と判断し、減速フラグFsdを減速中であることを表す“1”に設定する。
【0076】
次いで、ステップS25に移行し、GPSロスト状態であるか、すなわち、高精度な自車両の位置計測を行うことができない状態であるかどうかを判断する。そして、GPS衛星からの電波を十分受信可能な状態であって高精度に位置計測を行うことができる状態であるときには,GPSロスト状態ではないと判断しステップS27に移行する。
【0077】
一方、GPS衛星からの電波を受信することができない状態、又は、高精度な位置計測を行うためのGPS衛星からの電波を十分に受信することができない場合には、GPSロスト状態であると判断し、ステップS26に移行して公知の手順でデッドレコニング処理を行う。つまり、車輪速度センサ22FL〜22RRからの車輪速度、ヨーレートセンサ16からのヨーレートφ、加速度センサ15からの横加速度Yg等、各種センサの検出信号に基づいて自車両の現在位置を推定しこの現在位置推定値を所定の記憶領域に格納する。また、この現在位置推定値を、ナビゲーション装置35にも供給し、引き続き自車両前方の道路地図情報をナビゲーション装置35から取得する。
【0078】
次いで、ステップS27に移行し、GPSロスト状態から復帰したかどうかを判断する。すなわち高精度な位置計測を行うことができる状態に復帰したかどうかを判断し、ロスト状態から復帰したと判断されるときにはステップS28に移行し、減速処理を終了し、減速フラグFsdを減速中ではないことを表す“0”に設定した後、演算処理を終了する。一方、GPSロスト状態から復帰していないと判断されるとき、つまり、十分な位置計測を行うことができない場合には、ステップS29に移行し、ドライバが操舵操作を行っている状態かどうか、すなわち、手動操舵に切り換わったかどうかを判断し、手動操舵に切り換わった場合には、ステップS28に移行し、減速制御を終了する。一方、手動操舵を行っていない場合にはそのまま処理を終了する。
なお、手動操舵に切り換わったかどうかの判断は、例えば、ステアリングコラム内に内蔵されたトルクセンサに予め設定したしきい値以上のトルクがかかっているかどうかを検出すること等により行う。
【0079】
次に、上記第2の実施の形態の動作を説明する。
コントロールユニット8では、図18に示す演算処理を所定周期で実行し、自車両が標準走行車速Vnormで走行するよう、車速制御を行うと共に(ステップS13)、GPS測位により検出した自車両の現在位置またはデッドレコニングにより検出した自車両の推定現在位置に基づいて自車両が目標経路に沿って走行するよう転舵モータ20を駆動制御し、操舵制御処理を実行し自動操舵制御を行う(ステップS14)。
【0080】
また、前方カメラ31の撮像画像に基づいて上記第1の実施の形態で説明した手順で、将来の開空率Rsfを予測しこれに基づいてこの先、GPSロスト状態となるかどうかを予測する。そして、GPSロスト状態とはならないと予測されるときには引き続きGPS測位による自車両の現在位置に基づいて自動操舵制御を行うと共に、標準走行車速Vnormで走行するよう速度制御を行う。
【0081】
一方、この先GPSロスト状態となると予測されるときには、ステップS20でロスト状態となることがドライバに通知されると共に、ロスト時誘導可能距離が算出されて減速開始点が設定され(ステップS21、S22)、自車両が減速開始点に達していないときには、ステップS25からステップS27、ステップS29を経て引き続きGPS測位による自車両の現在位置に基づいて自動操舵制御を行うと共に、標準走行車速Vnormで走行するように速度制御が行われるが、自車両が減速開始点に到達すると、ステップS23からステップS24に移行し、減速フラグFsdを“1”に設定する。このため、車速制御処理(ステップS13)では、減速フラグFsdが“1”であることから、指定された車速パターンでの減速制御を開始し、自車両は減速する。
【0082】
そして、GPSロスト状態となっていない間は、引き続き自動操舵が行われると共に減速が行われ、この状態からGPSロスト状態となると、ステップS25からステップS26に移行し、デッドレコニングによる自車両の現在位置の推定が開始される。このため、デッドレコニングによる推定現在位置に基づいて自動操舵制御が行われ、引き続き減速が継続される。そして、GPSロスト状態となることのドライバへの通知やデッドレコニングによる現在位置の推定に伴ってドライバがステアリングホイールを握りその操作を開始すると、ステップS29からステップS28に移行し、減速制御を終了し、減速フラグFsdを“0”に設定する。このため、車速制御処理(ステップS13)では、減速フラグFsdが“0”であることから自車両が標準走行車速Vnormとなるように車速制御を開始し、自車両は標準走行車速Vnormで走行する状態に移行する。
【0083】
つまり、ドライバが手動操舵を開始したことから、自車両を停止させる必要はないため、減速制御に換えて標準走行車速Vnormでの走行制御が開始され、手動操舵による操舵制御が行われつつ、標準走行車速Vnormでの走行状態に移行することになる。
一方、ドライバが手動操舵を行わない場合には、引き続き減速制御が行われることから、減速開始点に到達した時点から、ロスト時誘導可能距離が経過した時点で、自車両は停止することになる。したがって、デッドレコニングによる推定現在位置に基づく自動操舵制御の制御精度を確保することができない時点で自車両は停車することになって、制御精度を確保することができない状態で自動操舵制御が継続されることが回避される。
【0084】
このように、GPSロスト状態を予測し、GPSロスト状態に移行すると予測されるときには、これをドライバに通知し、GPSロスト時の制御精度を確保することの可能な状態で自車両が停車するように減速を行うようにしたから、上記第1の実施の形態と同様の作用効果を得ることができると共に、予め設定した車速パターンで減速するようにしているから、ドライバが手動操舵を行わなかった場合であっても、十分余裕をもって減速し自車両を停車させることができ、また、自車両に急に減速度が発生することなく停車させることができる。
【0085】
なお、上記第2の実施の形態においては、車速パターンとして、予め設定した減速度(例えば、0.2G)で減速する場合について説明したが、これに限るものではなく、前記ステップS19で算出したGPSロスト確度Plに応じて車速パターンを変更してもよい。例えば、GPSロスト状態となるロスト確度が低いときほど減速度を大きくし、より遅い段階で減速を開始し、実際にロスト状態となったときに比較的大きな減速度で減速させるようにしてもよい。このようにすることによって、実際にはGPSロスト状態とはならないにも関わらず、減速度が発生することによってドライバに違和感を与えることを回避することができる。
ここで、上記第2の実施の形態において、ナビゲーション装置35が、GPS測位手段に対応し、図18のステップS14、ステップS21からステップS28の処理が走行制御手段及び減速制御手段に対応し、ステップS19の処理が確度検出手段に対応している。
【0086】
次に、本発明の第3の実施の形態を説明する。
この第3の実施の形態は、上記第1の実施の形態における自動操舵制御装置において、GPSロスト状態に移行すると予測されるときには、自車両を減速させるようにしたものであって、基本的な構成は上記第1の実施の形態と同様であるので、同一部の詳細な説明は省略する。
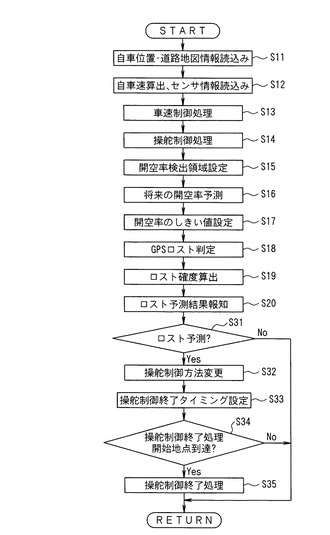
図19は、第3の実施の形態において実行される演算処理の処理手順の一例を示すフローチャートである。この演算処理は、例えば、予め設定した所定周期で実行される。
【0087】
図19において、ステップS11からステップS20は、上記第2の実施の形態における図18のステップS11からステップS20の処理と同一であって、自車両が目標経路に沿って走行するように自動操舵制御を行うと共に標準走行車速Vnormで走行するように車速制御を行う。また、自車両前方の撮像画像に基づいて上記第1の実施の形態の手順で、GPSロスト状態となるかどうかを予測し、GPSロスト状態となると予測されるときには、ロスト確度Plを算出すると共に、GPSロスト状態となることをドライバに通知する。なお、この報知は、後述の操舵制御方法の変更をもってして行うようにしてもよい。そして、GPSロスト状態が生じると予測されないときにはステップS31からステップS11に戻って引き続き自動操舵制御及び車速制御を継続する。
【0088】
一方、GPSロスト状態となると予測されるときにはステップS31からステップS32に移行し、GPSロスト状態となった場合に備えて操舵制御方法の変更を行う。具体的には、後述の操舵制御の終了処理が開始されるまで所定時間となった時点で、ステップS19で算出したGPSロストのロスト確度Plに基づき、ドライバが手動操舵を開始する可能性を推測し、手動操舵を開始する可能性が高いときにはドライバの操舵介入に備えてこの操舵介入を許容する操舵制御を行う。
【0089】
つまり、ロスト確度Plが高いときには、手動操舵への切り換わりに備えて、実際に手動操舵に切り換わる以前に、ドライバが手動操舵を開始する可能性が高いと判断し、ドライバの操舵介入による目標経路と自車両の走行位置との間の位置誤差の拡大よりも、ドライバの操舵介入を許容し、前以って手動操舵を開始することにより実際の手動操舵時には手動操舵へのスムーズな切り換わりを重視して、自動操舵制御における制御ゲインを小さくする。逆に、ロスト確度Plが低いときには、手動操舵をすぐには開始せず、しばらくは様子をみる可能性が高いと判断し、手動操舵へのスムーズな切り換わりよりも、位置誤差の拡大を抑えることを重視して自動操舵制御における制御ゲインを高める。
【0090】
このようにして、操舵制御方法の変更を行ったならば、ステップS33に移行し、操舵制御の終了タイミングを設定する。この操舵制御の終了処理の開始タイミングは、GPSロスト状態に移行すると予測される時間が経過した時点とし、GPSロスト状態に移行すると予測される時間が経過したとき、すなわち、GPSロスト状態となったときに操舵制御の終了処理を実行する。
【0091】
なお、デッドレコニング等によりGPSロスト後にもしばらく操舵制御を継続可能とする時間を設ける場合には、その継続時間(例えば、3秒間)を考慮し、GPSロストの予測される時間からさらにデッドレコニングの継続時間が経過した時点を、操舵制御の終了処理の開始タイミングとして設定してもよい。また、前記GPSロストが生じる予測時間を得ることができない場合には、予め設定した所定時間が継続したとき終了すればよい。
【0092】
続いて、ステップS34に移行し、自車両が操舵制御の終了処理の開始地点に到達したかどうかを判断する。この操舵制御の終了処理の開始地点は、前記ステップS33で設定した操舵制御の終了処理の開始タイミングと自車速Vownとに基づいて設定される。
そして、自車両が操舵制御の終了処理の開始地点に到達していなければ、そのまま処理を終了し、開始地点に到達したならばステップS35に移行し、操舵制御の終了処理を実行する。具体的には、ドライバに対して自動操舵を終了することを通知する等の処理を行い、ステップS14での自動操舵制御処理を終了させる。
【0093】
このように、第3の実施の形態においては、自車両がGPSロスト状態となると予測されない間は、GPS測位による自車両の現在位置に基づいて自動操舵制御が行われると共に、標準走行車速Vnormで走行するよう車速制御が行われるが、前方開空率Rsnowから予測される将来の開空率Rsfに基づいてGPSロスト状態となると予測されるときには、実際に手動操舵に切り換わる以前にドライバが手動操舵を開始すると予測し、GPSロストの確度Plに応じて、ステップS13での自動操舵制御における制御ゲインを調整し、ドライバが操舵介入を行うと予測されるときほど制御ゲインを小さくして手動操舵による操舵介入を許容するようにしたから、手動操舵への切り換わりをスムーズに行うことができる。
【0094】
また、このとき、ロスト確度Plに応じてドライバが手動操舵を行う可能性を推測し、これに応じて制御ゲインを調整するようにしているから、実際にはドライバが操舵介入を行っているのではないにも関わらず、操舵介入が許容されて、目標経路との位置誤差が大きくなったり、或いは、ドライバが手動操舵を行う意志があるにも関わらず、操舵介入が許容されないといった状態となったりすることを回避し、ドライバの手動操舵の意志に応じて的確に自動操舵制御を行うことができる。
【0095】
なお、前記第2の実施の形態と第3の実施の形態とを組み合わせて、GPSロスト状態となると予測されるときには、自動操舵制御における操舵制御方法の変更を行うと共に、減速制御をも行うようにしてもよい。また、自動操舵制御や減速制御を行う場合に限らず、GPS測位を行うGPS測位手段を備えると共に、このGPS測位により得た自車両の現在位置に基づいて車両の走行制御を行う走行制御手段を備えた車両であっても適用することができる。
ここで、上記第3の実施の形態において、ナビゲーション装置35がGPS測位手段に対応し、図19のステップS14、ステップS31からステップS35の処理が走行制御手段及び減速制御手段に対応し、ステップS19の処理が確度検出手段に対応している。
【0096】
次に、本発明の第4の実施の形態を説明する。
この第4の実施の形態は、上記第1の実施の形態において、将来の開空率Rsfに基づいてGPSロスト状態となるかどうかを予測するためのしきい値Rsθを、大気の状態に応じて補正するようにしたものである。その基本的な構成は上記第1の実施の形態と同様であるので同一部の詳細な説明は省略する。
図20は、将来の開空率Rsfのしきい値を補正するためのしきい値補正処理の処理手順の一例を示すフローチャートである。このしきい値補正処理は、コントロールユニット8において、予め設定された所定周期で実行される。
【0097】
このしきい値補正処理では、まず、ステップS41で、GPSロスト状況を検出し、現時点におけるGPS衛星の電波の取得状況を検出する。
そして、GPS衛星からの電波を受信することができずロスト状態にあるか、或いは、GPS衛星からの電波を受信することはできるが高精度な位置計測を行うことは困難な状態にあるか、或いは、GPS衛星からの電波を良好に受信し高精度な位置計測を行うことが可能な状態にあるかを判断する。
次いで、ステップS42に移行し、ステップS41で検出した衛星取得状況から、GPSロスト状態となったと判断されるとき、この時点における、自車両上空の開空率Rsownを検出しこれを所定の記憶領域に格納する
【0098】
この現地点における開空率Rsownは、前記図2のロスト予測処理において推測した将来の開空率Rsfを用いてもよいが、例えば、全周囲カメラ等によって実際に自車両上空を含む、GPS衛星からの電波の受信に影響を及ぼす自車両上空を撮像し、この撮像画像に基づいて、第1の実施の形態において説明した、前方の撮像画像における開空率Rsfの算出方法と同様の手順で実際に算出するようにしてもよい(ロスト開空率検出手段)。
【0099】
なお、このGPSロスト時における自車両上空の開空率Rsownは、例えば、1日の走行開始時からGPSロスト状態となる毎に検出し、同一日における、GPSロスト状態となったときの、自車両上空の開空率Rsownを収集する(受信状況検出手段)。
次いで、ステップS43に移行し、所定の記憶領域に格納しているある一日のこれまでの自車両上空の開空率Rsownについてその標準偏差の中央値を算出する。
そして、この標準偏差の中央値に基づいてこれに相当する開空率Rsを算出し、これを前記図2のロスト予測処理のステップS6で用いられる将来の開空率のしきい値Rsθとして設定する(しきい値補正手段)。そして、処理を終了する。
【0100】
ここで、GPS衛星からの電波の取得状況は、開空率だけでなく大気の状態等による影響も受ける。この第4の実施の形態では、上述のようにGPSロスト状態となったときの開空率、すなわち大気状態による影響が含まれる開空率を検出し、これに基づいて、GPSロスト状態となるかどうかを判断するための将来の開空率Rsのしきい値Rsθを更新しているから、大気状態による電波の受信状況を考慮してGPSロスト状態に移行するかどうかを判断することができる。したがって、大気状態が変化した場合であっても,GPSロスト状態となるかどうかを的確に予測することができる。
【0101】
なお、ここでは、自車両上空の開空率Rsownを一日の始まりの時点から蓄積するようにした場合について説明したが、一日の時間帯によっても大気状態は変化することから例えば、同一時間帯における開空率Rsownを、標準偏差の中央値の算出に用いるようにしてもよい。また、地域によっても大気状態は変化することから、例えば、自車両位置を基準としてある範囲内において収集した開空率Rsownのみを用いて標準偏差の中央値の算出を行うようにしてもよい。
また、ここでは、上記第1の実施の形態に適用した場合について説明したが、上記第2及び第3の実施の形態に適用してもよいことは言うまでもない。
【0102】
次に、本発明の第5の実施の形態を説明する。
この第5の実施の形態は、上記第1の実施の形態において、将来の開空率Rsfに基づいてGPSロスト状態となるかどうかを予測するためのしきい値Rsθを、自車両の上を横断する横断物に対応して補正するようにしたものである。その基本的な構成は上記第1の実施の形態と同様であるので同一部の詳細な説明は省略する。
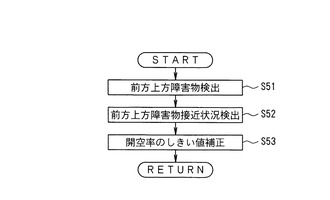
図21は、第5の実施の形態におけるしきい値補正処理の、第5の実施の形態における処理手順の一例を示すフローチャートである。このしきい値補正処理は、コントロールユニット8において、予め設定された所定周期で実行される。
このしきい値補正処理では、まず、ステップS51で、自車両進行路真上に位置する遮蔽物を検出する(上空遮蔽物検出手段)。
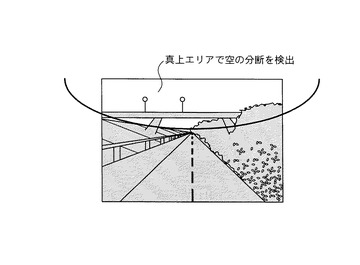
【0103】
この遮蔽物の検出は、例えば、図22に示すように、前方カメラ31で撮像した撮像画像に基づき空の領域が上下に分断されているかどうかを検出することによって行う。この判断は、撮像画像における空の領域の位置情報と、非空領域の位置情報とをもとに、空の領域の間に非空領域が存在するかどうかを判断すること等により行う。
そして、進行路真上に遮蔽物が存在する場合には、この遮蔽物までの距離を算出する。この距離の算出は、例えば、ステレオ視、或いは自車両の時刻t1における撮像画像と時刻t2における撮像画像の比較により三角法を用いて算出する。
【0104】
なお、空の領域の分断を検出する領域は、図22に示すように、仰角ラインLe以上の領域に限るものではなく、例えば、図23に示すように、自車両の真上に相当する領域に狭めるようにしてもよい。
また、例えば、自車両の走行路上の自車両正面に該当する走行路幅相当の領域に物体が存在するかどうかを判断するようにしてもよい。つまり、自車両の走行路上の正面に少なくとも走行路幅相当の物体が存在する場合、これは、すなわちトンネル等であって、自車両の真上に遮蔽物が存在するとみなすことができる。
【0105】
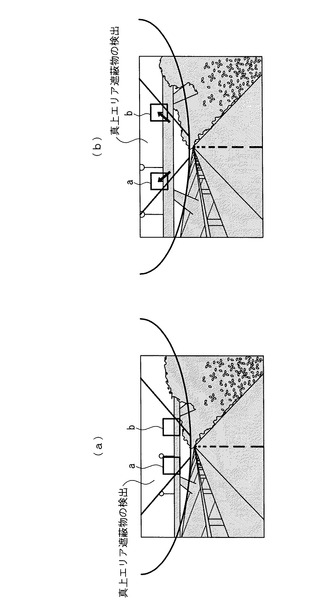
そして、このようにして、自車両の進行路真上に遮蔽物が存在すると判断されるときには、ステップS52に移行し、例えば、図24(a)、図24(b)に示すように、進行路真上に存在する物体を検出し、オプティカルフローに基づいて、この進行路真上の遮蔽物が自車両に到達するまでの、到達時間を算出する。
また、例えば、図25(a)、図25(b)に示すように、例えば、自車両の走行路上を横切る横断道路に相当するテンプレートを用意しておき、テンプレートマッチングを行うことによって、経路の頭上に位置する物体を検出し、その拡大度合から、物体が自車両の位置に到達するまでの時間を算出するようにしてもよい。
【0106】
このようにして、自車両の進行路真上の遮蔽物の有無を検出し、この遮蔽物が自車両に到達するまでの所用時間を算出したならば、ステップS53に移行する。そして、自車両の進行路真上に遮蔽物を検出したならば、この遮蔽物が自車両の上を通過する際には、上空の開空率に関わらず、GPS衛星の取得が不可となるため、自車両がこの遮蔽物の下を通過する通過開始地点から一時的に、前記図2のロスト予測処理のステップS6でGPSロスト状態となるかどうかを判断するための、将来の開空率Rsfのしきい値Rsθを、比較的大きなしきい値Rsθ2に設定する(しきい値補正手段)。
【0107】
このしきい値Rsθ2は、開空率Rsfが高い場合であっても、GPSロスト状態に移行すると判断し得る値に設定される。また、このしきい値Rsθ2への変更は、自車両がこの遮蔽物の下を通過し始める時点から、自車両がこの遮蔽物の下を通過し終え、ナビゲーション装置35において、GPS衛星からの電波の受信を再開し高精度な位置計測を行うことが可能となるまでの時間に設定される。
そして、このようにして将来の開空率Rsfの補正が終了したならば、しきい値補正処理を終了する。
【0108】
このように、この第5の実施の形態においては、自車両の真上に遮蔽物が位置し、自車両が遮蔽物の下を通過すると予測されるときには、自車両がこの遮蔽物の下を通過する際に、所定時間、GPSロスト状態となるかどうかを予測するための将来の開空率Rsfのしきい値Rsθを、GPSロストと判断し得ない値に設定するようにしたから、開空率RsfからはGPSロスト状態となるとは判断されない場合であっても、自車両が遮蔽物の下を通過することによりGPSロスト状態となることを確実にドライバに通知することができる。
【0109】
なお、この第5の実施の形態においては、上記第1の実施の形態に適用した場合について説明したが、これに限るものではなく、上記第2及び第3の実施の形態に適用することも可能であり、また、上記第4の実施の形態に適用し、大気状態及び真上の遮蔽物の存在に応じて開空率のしきい値Rsθを補正するようにしてもよい。
【0110】
次に、本発明の第6の実施の形態を説明する。
この第6の実施の形態は、上記第1の実施の形態において、将来の開空率Rsfに基づいてGPSロスト状態となるかどうかを予測するためのしきい値Rsθを、実際のGPSロスト状態の発生状況に応じて補正するようにしたものである。その基本的な構成は上記第1の実施の形態と同様であるので同一部の詳細な説明は省略する。
図26は、第6の実施の形態におけるしきい値補正処理の処理手順の一例を示すフローチャートである。このしきい値補正処理は、コントロールユニット8において、予め設定された所定周期で実行される。
【0111】
このしきい値補正処理において、ステップS61及びステップS62の処理は、第4の実施の形態における、図20のステップS41及びステップS42の処理と同様であって、GPS衛星からの電波の取得状況を検出し、GPSロスト状態となったときの現時点における自車両上空の開空率Rsownを算出する(ロスト開空率検出手段)。
次いで、ステップS63に移行し、GPSロスト状態であるときの現時点における自車両上空の開空率Rsownと、GPSロスト状態への移行を予測するための将来の開空率のしきい値Rsθとを比較し、自車両上空の開空率Rsownがしきい値Rsθ以下であるときには、そのまま処理を終了するが、自車両上空の開空率Rsownがしきい値Rsθ以上であるときには、ステップS64に移行する。
【0112】
このステップS64では、自車両上空の開空率Rsownがしきい値Rsθ以上である場合、本来GPSロスト状態になるとは予測されないはずであるが、それにも関わらずGPSロスト状態となっている状態であって、GPSロスト状態の予測が的確に行われていない状態であるから、GPS衛星からの電波の取得が困難な地点であるとして、この時点における現在位置のノード情報と、自車両上空の開空率Rsownとを対応付けて所定の記憶領域に格納する(ロスト地点情報収集手段)。
【0113】
なお、ステップS63で、自車両がこの地点を通過したときに自車両上空の開空率Rsownがしきい値Rsθ以上であると判断される回数が予め設定したしきい値以上継続したときに、この時点における自車両上空の開空率Rsownを現在地点のノード情報と対応付けて所定の記憶領域に格納するようにしてもよく、また、自車両上空の開空率Rsownがしきい値Rsθ以上であると判断されるときその開空率Rsownを所定の記憶領域に格納しておき、自車両上空の開空率Rsownがしきい値Rsθ以上であると判断される回数が予め設定したしきい値以上継続したときにこの間の開空率Rsownの平均値をノード情報と対応付けて格納するようにしてもよい。
【0114】
そして、ステップS65に移行し、自車両が所定領域に格納されている開空率Rsownと対応付けられたノード情報に該当する地点に位置するとき、現在位置に応じたノード情報に対応する開空率Rsownを、しきい値Rsθとして設定する。そして、自車両が該当ノード地点を含む所定領域の範囲外に移動したとき、もとのしきい値Rsθに戻す(しきい値補正手段)。そして、処理を終了する。
【0115】
このように、この第6の実施の形態においては、実際にGPSロスト状態となったときの開空率Rsownに基づいて、GPSロスト状態となるかどうかを判断するためのしきい値Rsθを更新し、しきい値Rsθをより実際に則した値に補正するようにしているから、開空率Rsfに基づいてGPSロスト状態となるかどうかの判断をより的確に行うことができる。
なお、ここでは、上記第1の実施の形態に適用した場合について説明したが、これに限るものではなく上記第2から第5の実施の形態に適用することができることはいうまでもない。
【図面の簡単な説明】
【0116】
【図1】本発明を適用した自動操舵制御装置の一例を示す概略構成図である。
【図2】図1のコントロールユニットで実行されるロスト予測処理の処理手順の一例を示すフローチャートである。
【図3】道路地図情報の構成を示す説明図である。
【図4】仰角ラインの設定方法を説明するための説明図である。
【図5】仰角ラインの設定方法を説明するための説明図である。
【図6】仰角ラインを走行経路に沿って設定する場合の設定方法を説明するための説明図である。
【図7】先行車両が存在するときの仰角ラインの設定方法を説明するための説明図である。
【図8】遮蔽物を考慮して仰角ラインを設定する場合の設定方法を説明するための説明図である。
【図9】テンプレートを用いて将来の開空率を推定する場合の推定方法を説明するための説明図である。
【図10】テンプレートを用いて将来の開空率を推定する場合の推定方法を説明するための説明図である。
【図11】テンプレートを用いて将来の開空率を推定する場合の効果の説明に供する説明図である。
【図12】GPS衛星の分布状況を考慮して将来の開空率を補正する場合の補正方法を説明するための説明図である。
【図13】GPS衛星の分布状況と遮蔽物に応じて将来の開空率を補正する場合の補正マップである。
【図14】オプティカルフローを用いて将来の開空率を推定する場合の推定方法を説明するための説明図である。
【図15】オプティカルフローを用いて将来の開空率を推定する場合の推定方法を説明するための説明図である。
【図16】オプティカルフローを用いて将来の開空率を推定する場合の効果の説明に供する説明図である。
【図17】ロスト確度マップの一例である。
【図18】第2の実施の形態において、コントロールユニットで実行される演算処理の処理手順の一例を示すフローチャートである。
【図19】第3の実施の形態において、コントロールユニットで実行される演算処理の処理手順の一例を示すフローチャートである。
【図20】第4の実施の形態において、コントロールユニットで実行されるしきい値補正処理の処理手順の一例を示すフローチャートである。
【図21】第5の実施の形態において、コントロールユニットで実行されるしきい値補正処理の処理手順の一例を示すフローチャートである。
【図22】自車両上空の遮蔽物の検出方法を説明するための説明図である。
【図23】自車両上空の遮蔽物の検出方法を説明するための説明図である。
【図24】自車両上空の遮蔽物に自車両が到達するまでの所用時間の算出方法を説明するための説明図である。
【図25】自車両上空の遮蔽物に自車両が到達するまでの所用時間の算出方法を説明するための説明図である。
【図26】第6の実施の形態において、コントロールユニットで実行されるしきい値補正処理の処理手順の一例を示すフローチャートである。
【符号の説明】
【0117】
1 ブレーキペダル
5FL〜5RR 左前輪〜右後輪
6FL〜6RR ホイールシリンダ
7 制動流体圧制御回路
8 コントロールユニット
9 エンジン
10 自動変速機
11 スロットルバルブ
12 駆動トルク制御ユニット
15 加速度センサ
16 ヨーレートセンサ
17 マスタシリンダ圧センサ
18 アクセル開度センサ
19 操舵角センサ
20 操舵モータ
21 ステアリングホイール
22FL〜122RR 車輪速度センサ
23 警報装置
31 前方カメラ
32 カメラコントローラ
35 ナビゲーション装置
【技術分野】
【0001】
本発明は、GPS衛星からの電波を受信しこれに基づきGPS測位を行う際に、遮蔽物等によりGPS測位が不可となるGPSロストが生じるかどうかを前以って予測するようにしたGPSロストの予測方法、これを用いたGPSロストの予測装置及び車両用走行制御装置に関するものである。
【背景技術】
【0002】
従来、自動操舵制御装置として、GPS測位により自車位置を計測し、この計測結果に基づいて自動操舵制御を行うようにしたものが提案されている。
このような自動操舵制御装置においては、GPS衛星からの電波を取得することができなくなった場合には、GPS測位が不可となることから、予めGPS測位不可となる地点を考慮して自動運転可能な自動運転サービス提供区間を設定し、この自動運転サービス提供区間が終了する際に、ドライバに対して自動運転サービス提供区間が終了する旨を通知し、ドライバが、手動操舵への交代の準備ができていないと判断されるときには、車両を停車させるようにしたもの(例えば、特許文献1参照)、また、GPS測位に異常が発生した場合等GPS測位が不可となったときには、自律センサを用いて自動操舵を継続することで、自動操舵運転が突然中止されないようにしたもの(例えば、特許文献2参照)、等が提案されている。
【0003】
また、GPS測位が不可となり自動操舵が突然中止されることによってドライバに違和感を与えることを回避するために、ナビゲーション装置の道路地図情報として、トンネル区間等、GPS測位が不可となる道路種別を保持しておき、このようなGPS測位が不可となる区間を、ナビゲーション装置の道路地図上に表示することによって、ドライバにGPS測位が不可となることを通知するようにしたシステムも提案されている(例えば、特許文献3)。
【特許文献1】特開2002−251690号公報
【特許文献1】特開平7−104847号公報
【特許文献1】特開平6−317650号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、GPS衛星からの電波を利用して、自動走行に利用する高精度な位置計測を行う場合、高精度な位置計測を行うためには、通常のナビゲーション装置で用いられる位置計測とは異なり、多くのGPS衛星からの電波を短い周期で連続して受信する必要がある。
このため、走行路外の植樹帯や、ビル、防音壁等によって、自車両からみて車両上空を見渡せる範囲が狭くなったり、頭上を左右に横切る道路看板の支柱等が出現したりする場合には、GPS衛星からの電波が遮られるため、複数のGPS衛星からの電波を連続して受信することが困難となる。そして、場合によっては、高精度な位置計測を継続するのに十分なGPS測位を行うことができず、自車位置の計測が困難となり、このGPS測位により得た自車位置に基づいて行っている自動操舵を継続することができず、自動操舵が解除されてしまう場合がある。
【0005】
このような場合には、ドライバ自身で、手動操舵を開始する必要があるのか、或いは、自車両を停止させる必要があるのかを、瞬時に判断する必要がある。また、自律センサを用いて自動操舵を継続しつつ、自車両を停止させるようになっている場合であっても、走行路の道路形状によっては、停車するまでの間に、自車両と目標地点との間の誤差が拡大してしまい、目標とする位置で停止させようとしても、停止誤差が大きくなってしまうという問題がある。
【0006】
そこで、この発明は上記従来の未解決の問題点に着目してなされたものであり、自動操舵から手動操舵への切り換わりに際し、ドライバが、余裕をもって対処することを可能とする、GPSロストの予測方法、GPSロストの予測装置及びこれを用いた車両用走行制御装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明に係るGPSロストの予測方法は、自車両上空の予め設定したGPS受信エリアにおいて空が占める割合である開空率を前以って推定し、この推定した将来の開空率に基づいて、GPS衛星からの電波に基づく測位が不可となるGPSロストが生じるかどうかを判断し、例えば、開空率が低い場合には電波を受信することが困難としてGPSロストが生じると予測する。
【0008】
このとき、自車両前方の走行路を撮像した撮像画像上で、走行路上の予め設定した前方地点に相当する位置に、この前方地点でのGPS受信エリア、つまり、この前方地点に自車両が位置すると仮定したときのGPS受信エリアに相当する開空率検出領域を設定し、この開空率検出領域内の画像に基づき、前記前方地点での実際の開空率を推定し、これに基づいて、GPSロストが生じるかどうかを判断する。
【発明の効果】
【0009】
本発明に係るGPSロストの予測方法によれば、自車両前方の撮像画像上で、走行路上の予め設定した前方地点に相当する位置に、この前方地点でのGPS受信エリアに相当する開空率検出領域を設定し、この開空率検出領域内の画像に基づいて、前記前方地点における実際の開空率を推定するようにしたから、GPSロストが生じるかどうかを、前以って容易に検出することができ、GPSロストが生じることに対し、予め適切な対応を図ることができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施の形態を説明する。
まず、第1の実施の形態を説明する。
図1は、本発明を適用した自動操舵制御装置を搭載した車両の車両概略構成図である。
図1中の符号1はブレーキペダル、2はブースタ、3はマスタシリンダ、4はリザーバであり、通常は、ドライバによるブレーキペダル1の踏込み量に応じて、マスタシリンダ3で昇圧された制動流体圧が、各車輪5FL〜5RRの各ホイールシリンダ6FL〜6RRに供給されるようになっているが、このマスタシリンダ3と各ホイールシリンダ6FL〜6RRとの間には制動流体圧制御回路7が介挿されており、この制動流体圧制御回路7内で、各ホイールシリンダ6FL〜6RRの制動流体圧を個別に制御することも可能となっている。
【0011】
前記制動流体圧制御回路7は、例えばアンチスキッド制御やトラクション制御に用いられる制動流体圧制御回路を適用したものであり、この実施形態では、各ホイールシリンダ6FL〜6RRの制動流体圧を、単独で個別に増減圧することができるように構成され、例えば比例ソレノイド弁を使用することによって任意の制動流体圧に制御可能に構成されている。この制動流体圧制御回路7は、後述するコントロールユニット8からの制動流体圧指令値に応じて各ホイールシリンダ6FL〜6RRの制動流体圧を制御する。
【0012】
また、この車両には、エンジン9の運転状態、自動変速機10の選択変速比、並びにスロットルバルブ11のスロットル開度を制御することにより、駆動輪である後輪5RL、5RRへの駆動トルクを制御する駆動トルク制御ユニット12が設けられている。
エンジン9の運転状態制御は、例えば燃料噴射量や点火時期を制御することによって制御することができるし、同時にスロットル開度を制御することによっても制御することができる。
なお、この駆動トルク制御ユニット12は、単独で、駆動輪である後輪5RL、5RRの駆動トルクを制御することも可能であるが、前述したコントロールユニット8から駆動トルクの指令値が入力されたときには、その駆動トルク指令値を参照しながら駆動輪トルクを制御する。
【0013】
さらに、この車両には、自車両に発生する前後加速度Xg及び横加速度Ygを検出する加速度センサ15、自車両に発生するヨーレートφを検出するヨーレートセンサ16、前記マスタシリンダ3の出力圧、いわゆるマスタシリンダ圧Pmを検出するマスタシリンダ圧センサ17、アクセルペダルの踏込み量、すなわちアクセル開度Accを検出するアクセル開度センサ18、ステアリングホイール21の操舵角θを検出する操舵角センサ19、各車輪5FL〜5RRの回転速度、いわゆる車輪速度Vwi(i=FL〜RR)を検出する車輪速度センサ22FL〜22RRが備えられ、それらの検出信号は前記コントロールユニット8に出力される。また、駆動トルク制御ユニット12で制御された車輪軸上での駆動トルクTwも合わせてコントロールユニット8に出力される。
【0014】
なお、検出された車両の走行状態データに左右の方向性がある場合には、何れも左方向を正方向とし、右方向を負方向とする。すなわち、ヨーレートφや横加速度Yg、操舵角θは、左旋回時に正値となり、右旋回時に負値となる。
また、車両には、自車両前方に、前記コントロールユニット8で後述の減速制御が作動するようなカーブが存在する場合に、これをドライバに警告したり、またGPSロスト状態となると予測されるときこれを通知したりするための警報装置23が設けられている。この警報装置23は、音声やブザー音を発生するためのスピーカやモニタを含んで構成され、表示情報及び音声情報によって警告を発することにより、減速度やGPSロストの発生をドライバに通知するようになっている。
【0015】
また、ステアリングシャフト21aには、図示しないクラッチを介して転舵モータ20が設けられ、転舵モータ20の駆動力が前記クラッチを介してステアリングシャフト21aに伝達されることによって、ステアリングホイール21の操作とは別にステアリングシャフト21aが回動するように構成され、前記クラッチをオンオフすることにより前記転舵モータ20の駆動力の前記ステアリングシャフト21aへの伝達を断続させることができるようになっている。
【0016】
また、図中、31は、例えば、単眼カメラで構成される前方カメラ(撮像手段)であって、この前方カメラ31の撮像画像に基づき、カメラコントローラ32で、自車両前方の自車両と同じ走行車線を走行する前方車両を検出する。また、前記カメラコントローラ32は、前方カメラ31の撮像画像に基づいて自車両と並走する並走車両又は先行車両との間の前後方向の距離である縦距離Ypv、左右方向の距離である横距離Xpv及び、並走車両、先行車の車高Hpv等を検出する。
【0017】
さらに車両には、GPS測位を行って自車両の現在位置を計測し、自車両周辺の道路地図情報を表示するナビゲーション装置35が搭載され、このナビゲーション装置35は、公知のナビゲーション装置と同様に構成され、GPS衛星からの電波を受信しこれに基づいて自車両の現在位置を計測する測位部、道路地図情報を記憶する記憶部、測位部で計測した自車両の現在位置周辺の道路地図情報を前記記憶部から抽出しこれを表示すると共に、コントロールユニット8に、自車両の現在位置及び自車両前方の予め設定した所定範囲内の道路地図情報を出力する表示処理部、等を備えている。
【0018】
前記コントロールユニット8は、これら各種センサ及びナビゲーション装置35でGPS測位により検出した自車両の現在位置情報をもとに、自動操舵制御を行い、自車両が目標とする走行経路に沿って走行するように、公知の手順で前記操舵モータ20を駆動制御して自動操舵を行う。また、前記ナビゲーション装置35でのGPS測位が不可となるGPSロスト状態となったときには、例えばGPSロスト状態となる直前の自車両の現在位置を初期値として公知のデッドレコニングにより自車両の現在位置を推定しこれに基づいて自動操舵を継続すると共に、この間、ドライバに間もなく手動操舵に移行することを通知し、所定時間が経過したとき自動操舵を終了する。
【0019】
また、ナビゲーション装置35においてGPSロスト状態となるかどうかを予測するロスト予測処理を実行し、GPSロスト状態となると予測されるときには、GPSロスト状態となることを、前以って通知する。
また、コントロールユニット8は、前記制動流体圧制御回路7や前記駆動トルク制御ユニット12、また、前記アクセルペダルに設けられ、且つアクセルペダルの踏込みが行われたときの反力を制御するための図示しない反力制御装置を制御し、自車両のアクセルペダルやブレーキペダルの踏込み操作に関わらず自車両の加減測度を調整し、自車両の走行状態を制御可能に構成されている。
【0020】
図2は、前記コントロールユニット8で実行されるロスト予測処理の処理手順の一例を示すフローチャートである。
このロスト予測処理では、まず、ナビゲーション装置35から、自車両の現在位置(Xown,Yown)及び、自車両前方の所定領域の道路地図情報を読み込み、道路地図情報を構成するノードデータ(X、Y)のうち、図3に示すように、自車位置(Xown,Yown)を基準とし前後に所定距離だけとった範囲(X0,Y0)〜(Xn,Yn)を常時バッファに保有する。ここで、前方側の距離は、後述の開空率検出領域Adを設定するのに十分な距離に設定され、例えば、自車速Vownに所定時間tαを乗じた値(=Vown・tα)、又は、この自車速Vownと所定時間tαとの乗算値及び予め設定した規定値との何れか大きい方に設定する。また、ナビゲーション装置35から読み込んだノードデータ(X,Y)に付随する、このノード地点を走行する際の標準走行車速Vnormを読み込む(ステップS1)。
【0021】
次いで、ステップS2に移行し、各種センサから出力される各車輪速Vfl〜Vrr、前後加速度Xg、横加速度Yg、ヨーレートφ等を読み込む。また、各車輪速Vfl〜Vrrの平均値から自車速Vownを算出する。
次いで、ステップS3に移行し、前方カメラ31で撮像した撮像画像に対し、開空率検出領域Adを設定する。この開空率検出領域Adは、所定の前方地点での、空が見える割合を表す前方開空率を検出するための検出対象領域である。
【0022】
ここで、開空率は、前記ナビゲーション装置35において、GPS衛星からの電波を受信する対象エリアとして設定されている自車両上空のGPS受信エリアにおいて、GPS衛星からの電波の取得に影響を及ぼす遮蔽物のない、空の占める割合を表す。そして、前記前方開空率とは、前方地点での開空率を表し、前記開空率検出領域Adは、前方地点における前記GPS受信エリアを後方からみたときのエリアに相当する領域である。
【0023】
この開空率検出領域Adの設定方法は、次の第1の設定方法から第4の設定方法の何れかを採用することができる。
開空率検出領域Adの第1の設定方法は、図4(a)及び図4(b)に示すように、前方カメラ31の撮像画像において、自車両が、自車両の走行経路上の前方の地点であって、現在位置から所定の距離(以後、経路上前方距離ともいう。)だけ前方の地点に位置するときの所定の仰角高さに相当する位置に、水平方向に仰角ラインLeを設定し、この仰角ラインLeよりも上の部分を、前記開空率検出領域Adとする。
【0024】
前記経路上前方距離は、例えば、前方注視点距離に相当する値に設定される。また、前記仰角高さは、ナビゲーション装置35において、GPS測位に用いるGPS衛星の高度に相当する仰角相当の値に設定され、例えば、ナビゲーション装置35の測位部において、電波の受信をマスクする角度、すなわち、ナビゲーション装置35において、所定の仰角以上に位置するGPS衛星のみからの電波を計測対象とし、所定の仰角よりも低いGPS衛星からの電波を受信しないようにするための仰角を適用してもよい。
【0025】
なお、図4(a)は、自車両前方に、ナビゲーション装置35において、GPS衛星からの電波の受信を困難とする、高いビル等の遮蔽物がない場合の撮像画像を表し、図4(b)は、遮蔽物がある場合の撮像画像を表す。
このように、GPS衛星からの電波を的確に受信することの可能な仰角に応じた仰角ラインLeを設定し、この仰角ラインLeよりも上の領域を、開空率検出領域Adとして設定することによって、実際にはGPS衛星からの電波の受信を行わない不要な領域、つまり、比較的低い領域が、開空率検出領域Adに含まれることを回避することができ、実際のGPS受信エリアに則した開空率検出領域Adを設定することができる。
【0026】
次に、開空率検出領域Adの第2の設定方法を説明する。
この第2の設定方法は、図5(a)及び図5(b)に示すように、撮像画像の横方向中央を基準として左右が上方向に湾曲する仰角ラインLeを設定し、仰角ラインLeよりも上の領域を、開空率検出領域Adとする。
つまり、撮像画像において両側の部分は、自車両に比較的近い領域であって比較的早い時点で通過する領域である。そこで、将来空を遮蔽する物体が存在する領域に重点をおくため、図5(a)、図5(b)に示すように、撮像画像においてその両側の部分を含まないように、左右が上方に湾曲した仰角ラインLeを設定する。
【0027】
このように、開空率検出領域Adの左右の領域を狭くすることによって、実際のGPS受信エリアに則した開空率検出領域Adを設定することができる。
なお、自車両に比較的近い領域である両側の部分は、自車両の車速が高いときほど、より早い時点で通過する領域となるから、図5(c)に示すように、自車速が高いときほど、仰角ラインLeの上方への湾曲度合がより大きくなるように、仰角ラインLeを設定してもよい。このように車速に応じて仰角ラインLeを設定することによって、実際の走行状態に応じてより的確に開空率検出領域Adを設定することができる。
【0028】
次に、開空率検出領域Adの第3の設定方法を説明する。
この第3の設定方法は、図6(a)に示すように、前記第2の設定方法にしたがって設定した仰角ラインLeを、図6(b)に示すように、自車両の将来の経路に沿って左右にずらすようにしたものである。前記自車両の将来の経路は、例えば、ナビゲーション装置35からの道路地図情報に基づいて取得するようにしてもよく、また、前方カメラ31の撮像画像から道路白線を抽出しこれに基づいて検出するようにしてもよい(走行経路検出手段)。そして、このようにして取得した将来の経路に基づき、撮像画像において、自車両の走行経路上の、現在位置から経路上前方距離だけ前方の前方地点(例えば、前方注視点)に、前記仰角ラインLeの中心がくるように設定する。
【0029】
なお、前記前方地点を決定する経路上前方距離は、前方注視点距離を設定してもよく、また、図6(c)に示すように、自車速Vownに応じて変更してもよい。具体的には、自車速Vownが比較的低い領域では、経路上前方距離は比較的小さい値に設定され、自車速Vownが増加するとこれに比例して経路上前方距離も増加し、自車速Vownが比較的高い領域では、経路上前方距離は比較的長い値に設定される。つまり、自車両が高速走行するときほど、経路上前方距離だけ前方の地点に、自車両が実際に到達するまでの所用時間は短い。したがって、自車両が高速であるときほど経路上前方距離をより長い値に設定し、より遠くの空を開空率検出領域Adとして設定することによって、自車両が経路上前方距離だけ前方の地点に到達したときに、実際にはGPS衛星の受信に影響を及ぼさない領域が開空率検出領域Adとして設定されることを回避し、実際に則したより的確な範囲を開空率検出領域Adとして設定することができる。
【0030】
次に、開空率検出領域Adの第4の設定方法を説明する。
この第4の設定方法は、開空率検出領域Adの第2の設定方法又は第3の設定方法により設定した仰角ラインLeに対し、移動障害物を自車両の前方の所定距離の範囲内に検出したときには、図7(a)及び図7(b)に示すように、その移動障害物が、開空率検出領域Ad外となるように、仰角ラインLeの形状を補正する。なお、仰角ラインLeの補正の対象となる移動障害物は、自車両が走行中のレーン内にあるもののみを対象とし、並走する他レーンを走行中の場合には、将来自車両の横側の遮蔽物となり得るため、開空率検出領域Ad内の物体として扱うようにしてもよい。
なお、前記移動障害物は、例えば、前方カメラ31の撮像画像において、物体の移動状況から、移動障害物であるかどうかを、公知の手順で判断すればよい(移動物体検出手段)。
【0031】
以上説明した、第1から第4の設定方法の何れかによって、開空率検出領域Adを設定したならば、ステップS4に移行し、将来の開空率Rsfを予測する。
この将来の開空率Rsfは、次の第1から第3の予測方法の何れかによって予測する。
まず、将来の開空率Rsfの第1の予測方法は、将来の開空率Rsfが、前方カメラ31の撮像画像から得られる現時点における前方の開空率Rsnowと一致すると仮定して予測する方法である。
【0032】
具体的には、前記ステップS3で設定した開空率検出領域Ad内において、撮像画像から得られる空に相当する領域Asが占める割合(=空の領域Asの面積(空面積)/開空率検出領域Adの面積)を算出し、これを前方開空率Rsnowとする(前方開空率推定手段)。
そして、この前方開空率Rsnowを、将来の開空率Rsfとする。
【0033】
前記開空率検出領域Ad内における空の領域Asは、次の手順で算出する。
まず、撮像画像の開空率検出領域Adにおいて、同色又は同輝度の領域を検出し、最も大きい面積を占める領域の中で、青或いは白に相当する輝度の部分を抽出し、これを空に相当する領域とみなし、その全合計面積を、空面積すなわち空の領域Asとする。
なお、空と同色の建物を排除するために、開空率検出領域Adに対してオプティカルフロー処理を施し、オプティカルフローが所定値以上となる部分は、空に相当する部分ではないと判断し、この部分は、空面積に加算しないようにしてもよい。
【0034】
また空の領域Asの検出にあたっては、図8に示すように、自車両が走行する走行路沿いの建物の高度情報と建物の密集度合情報とを獲得し、この建物が存在する部分については、撮像画像において非空領域として扱うようにしてもよい。
具体的には、前記建物の高度情報と密集度合情報とを、例えばナビゲーション装置35のノード情報に含ませる(遮蔽物体情報獲得手段)。そして、このノード情報を参照することによって、道路沿いの建物の高度情報及びその密集度合を獲得する。
【0035】
次に、高度情報に基づいて各建物の高度の平均値を正規化し、高度が高いときほど“1”に近づくように“0〜1”の値で表すと共に、密集度合を正規化し、密集しているときほど“1”に近づくように、 “0〜1”の値で表す。そして、これら正規化した高度情報及び密集度合を乗算すると共に所定のゲインを乗算し、これを遮蔽物体線Liの角度αとする。
【0036】
次に、撮像画像において、経路上前方距離だけ前方の地点に相当する位置に、自車両がこの地点に位置する場合の前記所定仰角の高さに相当する位置を基点とし、前記角度αを有する直線を設定し、これを遮蔽物体線Liとする。つまり、遮蔽物体線Liは、仰角ラインLeと、経路上前方距離だけ前方の地点に相当する位置で交差しこの位置を起点とする直線となる。
【0037】
そして、撮像画像において、仰角ラインLeよりも上の領域であり、且つ遮蔽物体線Liよりも上の領域を、空の領域Asの検出対象領域とする。前記遮蔽物体線Liの角度αは、高度情報及び密集度合に応じて設定され、建物の平均高度が高いときほど角度αは大きくなり、また、密集しているときほど角度αは大きくなるから、図8に示すように、平均高度が高いときほど、また密集度合が高いときほど遮蔽物体線Liの傾きが大きくなって、空領域Asの検出対象領域は狭くなり、結果として、空領域Asが狭くなって、建物がGPS衛星の電波の取得に与える影響を考慮して空領域Asを、実際に則して設定することができる。
【0038】
このとき、前記建物が、自車両の走行路よりも離れた地点に位置するときほど、この建物が、ナビゲーション装置35におけるGPS衛星からの電波の受信に与える影響は小さいことから、例えば、走行路から建物までの横方向の距離情報或いは、走行路と建物との間に歩道があるか、或いは、自車両が中央よりの走行車線を走行しており自車両の右側或いは左側に他の車線があるかどうか等といった横方向の位置情報を、ナビゲーション装置35の道路地図情報等から獲得し、横方向の距離に応じて遮蔽物体線Liの角度αを補正するようにしてもよい。つまり、横方向の距離が長いときほど、この建物がGPS衛星からの電波の受信に与える影響は小さいことから、角度αが小さくなるように補正してもよい。このようにすることによって、建物が自車両のGPS衛星の電波の受信に与える実際の影響に則して遮蔽物体線Liを設定することができ、より実際に則した空領域Asを算出することができる。
【0039】
このように、将来の開空率Rsfの第1の予測方法は、現時点で検出した前方開空率Rsnowを将来の開空率Rsfとして設定するようにしたから、将来の開空率Rsfを複雑な演算を伴うことなく容易に検出することができる。
また、このとき、現時点における前方開空率Rsnowを、将来の開空率Rsfとして用いた場合、道路脇の建物等といった遮蔽物が存在する場合、その高さや配置位置によっては、自車両がこれら遮蔽物に実際に近づいた場合、場合によっては開空率が低下する場合があるが、前述のように、走行路脇の建物等の存在状況に応じて将来の開空率Rsfを補正しているから、現時点で検出した前方開空率Rsnowを将来の開空率Rsfとして用いることによる将来の開空率Rsfの精度の低下を抑制することができる。
なお、ここでは、建物の高さや密集度に応じて将来の開空率Rsfを補正する場合について説明したが、これに限るものではなく、例えば、比較的高さのある防音壁等といった、ナビゲーション装置35でのGPS衛星からの電波の取得に影響を及ぼすような遮蔽物の存在を考慮して補正することも可能である。
【0040】
次に、将来の開空率Rsfの第2の予測方法を説明する。
この第2の予測方法は、図9に示すように、空ではない領域の特徴点がどのように推移するかを予測することによって、将来の開空率Rsfを予測する方法である。
具体的には、まず、撮像画像上に設定した開空率検出領域Adについて、空の領域Asとそうではない領域とを分離する。これは、将来の開空率Rsfの第1の予測方法で空の領域Asを検出した場合と同様の手順で行う。
【0041】
次に、図9(a)に示すように、開空率検出領域Ad内の、空の領域Asではない部分について、その領域を特定することの可能な特徴点に対してテンプレートを付与する。
例えば、図9(a)では、撮像画像の非空領域中の物体(ビル)の角部分を特徴点とし、これに対して3つのテンプレートa、b、cを設定している。このテンプレートは必ずしも角に対して設定する必要はなく、例えば、図9(b)に示すように、空の領域と非空領域との境界に配置してもよい。要は、非空領域である領域を特定することの可能な部分を前記特徴点として設定すればよい。
【0042】
このようにして、テンプレートを配置したならば、撮像情報の各読み込み時点における撮像画像において、図9(a)、図9(c)、図9(d)に示すように、撮像画像間で、前記テンプレートの推移を追い、その推移状況を検出する。すなわち、単位時間当たりのテンプレートの移動量と、単位時間当たりに自車両が進む距離(自車速Vownに基づいて算出)とを検出する。
【0043】
次に、図10に示すように、開空率検出領域Adを、自車両の現在位置でのGPS受信エリア相当の領域に拡大したと想定した、予め設定した大きさの拡大画像を設定する。
なお、図10において、破線は前方注視点を通るラインを表し、実線は後述の仰角ラインLeを表す。また、ラインm1、m2、m3は、例えば10度、20度、30度の仰角に相当するラインを表す。
【0044】
そして、この拡大画像において上記と同様の手順で仰角ラインLeを設定し、この仰角ラインLeよりも上の領域を仮想開空率検出領域とする。また、この仮想開空率検出領域の面積を求める。
そして、前記テンプレートの推移状況で特定される単位時間当たりのテンプレートの移動量と、現時点における自車速Vownとに基づいて、所定時間Δt後におけるテンプレートの位置を予測し、テンプレートの位置から、仮想開空率検出領域内の非空領域を特定し、その面積を算出する。
【0045】
そして、仮想開空率検出領域内の非空領域の面積を、仮想開空率検出領域の面積から差し引いて、仮想開空率検出領域内の空の領域の面積を算出し、この空の領域が、仮想開空率検出領域において占める割合を算出する(=空の領域の面積/仮想開空率検出領域の面積)。
これによって、所定時間Δt後の、開空率が算出されることになる。
この処理を、繰り返し行って現時点以後、所定時間Δt毎に各時点における開空率を予測し、自車両が前記経路上前方距離だけ前方の地点に到達するのに要する所要時間後までの開空率をΔt毎に算出する。これによって、自車両が前記経路上前方距離だけ前方の地点に到達するまでの所定時間Δt毎の開空率が時系列で算出されることになる。
【0046】
そして、自車両が前記経路上前方距離だけ前方の地点に到達するまでに要する所要時間後での、仮想開空率検出領域内の空の領域は、前記空の領域の推移状況から未来の空の領域を予測したものであるから、自車両が前記前方の地点に実際に位置するときに、その上空のGPS受信エリアを撮像した場合の撮像画像における、GPS受信エリアに相当する領域内の空の領域と同等とみなすことができる。
したがって、この自車両が前記経路上前方距離だけ前方の地点に到達するまでに要する所要時間後に相当する開空率を、将来の開空率Rsfとする。
【0047】
このように、非空領域の特徴点の推移状況から、非空領域の推移を予測して空領域の推移状況を推測し、これに基づいて、将来の開空率Rsfを算出するようにしたから、より実際に則した開空率Rsfを算出することができる。また、テンプレートを設定した特徴点の推移状況から非空領域を推測し、これに基づいて将来の開空率Rsfを推定しているから、例えば図11に示すように、遠方に位置する山等、相当時間がたたないと影響を及ぼすことのない遮蔽物の影響を正しく予測することができる。
【0048】
ここで、GPS衛星が多数存在する領域と、遮蔽される領域すなわち非空領域とが重なる場合には、ナビゲーション装置35におけるGPS衛星からの電波の受信に影響を及ぼすことから、上空のGPS衛星の配置が既知である場合には、GPS衛星が多数存在する領域と、非空領域とが重なるか否かに応じて、上述のようにして予測した将来の開空率Rsfを補正するようにしてもよい。
【0049】
例えば、図12(a)に示すように、図10に示す仮想的な拡大画像において、仰角ラインLeよりも上の仮想開空率検出領域を、3つの領域に分割する。なお、この領域は、例えば、図12(b)に示すように、自車両の左側方に相当するエリア、自車両の前方に相当するエリア、自車両の右側方に相当するエリアに対応する。
【0050】
そして、GPS衛星の位置情報から各エリアに含まれるGPS衛星の配置状況を検出し、各領域について、GPS衛星の分布状況を、粗、中、密の3段階に設定する。また、各エリアの遮蔽物体の存在状況から、各エリアについて遮蔽物体によりうける影響の度合を、小、中、大の3段階に設定する。前記GPS衛星の配置状況は、例えば、ナビゲーション装置35の道路地図情報として予め設定しておき、ナビゲーション装置35から、自車両の現在位置周辺におけるGPS配置状況を獲得するようにすればよい(GPS衛星配置状況検出手段)。
【0051】
そして、例えば、エリア内にGPS衛星が5つ以上あるときには“密”、3〜4個の場合には“中”、0から2個の場合には“粗”として設定する。また、前記遮蔽物体によりうける影響の度合は、仮想的な拡大画像の仮想開空率検出領域における開空率、すなわち将来の開空率Rsfに対する、各エリアに対応する領域での開空率Rsfn(=Rsfn/Rsf)に基づいて算出し、これらの比が140%以上であるときには、影響は“大”、60%より大きく140%未満であるときには影響は“中”、60%以下であるときには影響は“小”と判断する。
【0052】
そして、遮蔽物体の存在状況及びGPS衛星の分布状況がナビゲーション装置35においてGPS衛星からの電波の受信に対してどのように影響を与えるか、つまり、GPS衛星からの電波を取得しやすい方向に作用するのか、或いは電波を取得しにくい方向に作用するのかを判断しその判断結果に応じて、将来の開空率Rsfの補正度合を設定する。
【0053】
この補正度合は、例えば図13に示すような補正マップに基づいて設定する。図13において、GPS衛星の分布が粗い場合には、遮蔽物体により受ける影響が“小”であれば補正なしとして設定され、遮蔽物体により受ける影響が“中”であれば補正度合は“−1”として設定され、“大”であれば“−2”として設定される。また、GPS衛星の分布が中程度である場合には、遮蔽物体により受ける影響が“小”であれば“+1”、“大”であれば“−1”、“中”であれば補正なしとして設定される。また、GPS衛星の分布が密である場合には、遮蔽物体によりうける影響が“小”であるときには“+2”、“中”であれば“+1”、そして、遮蔽物体によりうける影響が“大”であるときには補正なしとして設定される。
【0054】
そして、このようにして各領域について、補正度合を決定したならば、各領域の補正度合を加減算し、加減算結果が正値ならばその数に応じて将来の開空率Rsfを上方補正し、負値ならばその数に応じて将来の開空率Rsfを下方補正する。
このように、GPS衛星の配置状況と遮蔽物体の存在状況とによって、GPS衛星の電波の受信状況に与える影響を考慮して、将来の開空率Rsfを補正するから、より実際に則した開空率Rsfを得ることができる。
【0055】
なお、ここでは、前記拡大画像を設定し、拡大画像における仮想開空率検出領域において将来の非空領域を予測し、これに基づいて仮想開空率検出領域において空の領域が占める割合を検出し将来の開空率Rsfとするようにした場合について説明したが、多少精度は低下するものの、例えば、前方カメラ31により得られた撮像画像の範囲内、つまり、開空率検出領域において将来の非空領域を予測し、これに基づいて開空率検出領域において空の領域が占める割合を算出しこれを将来の開空率Rsfとして用いるようにしてもよい。
【0056】
次に、将来の開空率Rsfの第3の予測方法を説明する。
この第3の予測方法は、撮像画像において非空領域がどのように推移するかを、非空領域のオプティカルフロー推移から予測するものである。
まず、上記第1の予測方法と同様の手順で、撮像画像の開空率検出領域Adにおいて、空の領域と非空領域とを分離する。
【0057】
次に、図14(a)に示すように、非空領域の遮蔽物体のオプティカルフローを検出するための検出点を、開空率検出領域Adに対して分布する。なお、このオプティカルフローの検出は、例えば画像処理ボードに予め内蔵しておいたオプティカルフロー処理を用いて行うようにしてもよく、また、ソフトウェア的な処理によって検出するようにしてもよい。また、ソフトウェア的な処理によって検出する場合には、非空領域として検出した部分に対してのみ検出点を設定しオプティカルフロー処理を行うようにしてもよい。
【0058】
このようにして検出点を設定したならば、図14(a)、図14(b)、図14(c)、図14(d)に示すように、各読み込み時点での撮像画像について、非空領域の遮蔽物体に対応する検出点のオプティカルフローを検出することで、遮蔽物体の推移を検出する。そして、この場合も、図15に示すように、撮像画像を予め設定した大きさに拡大した仮想的な拡大画像を想定し、テンプレートを設定した場合と同様の手順で、オプティカルフローに基づいて、仮想的な拡大画像における非空領域の面積を算出し、上記と同様に、現時点以後、所定時間Δt毎の、開空率を推測し、自車両が前記経路上前方距離だけ前方の地点に達するのに要する所要時間後までの、開空率を算出する。これによって、この場合も、所定時間Δt毎の開空率が時系列に算出されることになる。そして、自車両が前記経路上前方距離だけ前方の地点に到達するのに要する所要時間後に相当する開空率を、将来の開空率Rsfとする。
【0059】
このようにオプティカルフローを用いて、開空率を予測することによって、例えば、図16に示すように、自車両に対して相当時間がたたないと影響を及ぼすことのない山等の遠方の遮蔽物体の影響を正しく予測することができると共に、開空率が将来どのように低下していくのかを、時系列的に予測することができる。
なお、この第3の予測方法を用いる場合も、前述と同様の手順で、GPS衛星の配置状況に応じて開空率Rsfを補正するようにしてもよい。また、この場合も、開空率検出領域の範囲内で、将来の開空率Rsfを算出することも可能である。
【0060】
そして、このようにして、上記第1から第3の予測方法の何れかを用いて将来の開空率Rsfを予測したならば、ステップS5に移行し、GPS衛星からの電波の取得が困難となるGPSロスト状態となると判断するための、将来の開空率Rsfのしきい値を設定する。これは例えば、予め設定した値をしきい値として設定すればよい。
続いて、ステップS6に移行し、ステップS5で設定した開空率Rsfのしきい値Rsθと、ステップS4で算出した将来の開空率Rsf、つまり、自車両が経路上前方距離だけ前方の地点に到達したときの開空率Rsfとを比較し、GPSロスト状態となるかどうかを予測する。すなわち、将来の開空率Rsfがそのしきい値Rsθよりも大きいときには、GPSロストとはならないと判断し、将来の開空率Rsfがそのしきい値Rsθ以下の場合にはGPSロストとなると判断する。
【0061】
なお、将来の開空率Rsfを算出する際に、将来の開空率Rsfの時系列的な予測値を得ることが可能な、前記第2の方法或いは第3の方法により将来の開空率Rsfを算出した場合には、時系列的な予測値が、将来の何れかの時点でしきい値Rsθ以下となったときに、GPSロストとなると判定するようにしてもよい。また、この場合には、GPSロストとなったときの時間から、GPSロストが生じる時間を予測するようにしてもよい。
【0062】
このようにして、GPSロスト状態となるかどうかを予測したならば、ステップS7に移行し、GPSロストとなるロスト確度Plを算出する。このロスト確度Plは、前記ステップS6で、GPSロスト状態となると予測されるとき、次の2つの状態変数の関係から、ロスト確度Plを、大、中、小の3段階のいずれかに設定する。
前記状態変数としては、将来の開空率Rsfとその閾値Rsθとの差ΔRsの絶対値と、時系列に算出される所定時間Δt毎の開空率の予測値において、開空率がしきい値Rsθ以下となるときの、開空率としきい値Rsθとの差ΔRstの積算値ΣΔRstとを用いる。
【0063】
そして、将来の開空率Rsfとその閾値Rsθとの差ΔRsの絶対値の大きさに応じて、差ΔRsを“大、中、小”の三段階に分類し、また、前記積算値ΣΔRstの大きさに応じて、積算値ΣΔRstを“大、中、小”の三段階に分類する。そして、図17のロスト確度マップに示すように、差ΔRsの絶対値が“大”であるとき、また、積分値ΣΔRstが“大”であるときには、他方の大きさに関わらず、ロスト確度Plは“大”と判断する。また、差ΔRsが“中”であるときには、積分値ΣΔRstが“中”、又は“小”であるときロスト確度Plは“中”と判断する。そして、差ΔRsの絶対値が“小”であるときには、積分値ΣΔRstが“中”のときにはロスト確度Plは“中”、積分値ΣΔRstが“小”のときにはロスト確度Plも“小”と判断する。
【0064】
そして、ステップS8に移行し、ステップS6でGPSロストが生じると予測されるときには、警報装置23を作動し、ドライバに対してGPSロストが生じることを通知する。また、ロスト確度Plを算出した場合にはこれも通知する。
このように単にGPSロストが生じるかどうかだけでなく、そのロスト確度Plも通知することによって、ドライバはロスト確度Plに応じて対応することが可能となる。
【0065】
また、将来の開空率Rsfを時系列的に算出しており、GPSロストとなるまでの時間を予測することができる場合には、GPSロストとなるまでの予測時間が短いときほど、警報の強度や頻度を高めること等によって、GPSロストとなる状態が近いことを通知するようにしてもよい。
また、GPSロストとなる確度Plに応じて、ドライバがその後の対応をしやすいように、ランプの色やブザーの音質、音声の内容を変更するようにしてもよい。
このように、将来の開空率Rsfに応じて、GPSロスト状態となるかどうかを予測し、GPSロスト状態となると予測されるときには、これがドライバに通知される。
【0066】
したがって、自動操舵制御処理によって、GPS測位により得た自車両の現在位置に基づいて目標とする走行経路に沿って自動操舵制御が行われ、ドライバのステアリングホイールの操作に関わらず自動操舵が行われている状態で、GPSロスト状態となると、所定期間デッドレコニングによって自動操舵が継続された後、手動操舵に切り換わることになるが、自車両が実際にGPSロスト状態となる前に、GPSロスト状態となることがドライバに対して前以って通知されるから、GPSロスト状態となり手動操舵に切り換わった場合であっても、ドライバは、手動操舵に対して、余裕を持って対処することができ、安全性をより向上させることができる。
【0067】
また、このとき、前述のように、将来の開空率Rsfの算出に用いる開空率検出領域Adを第1から第4の設定方法の何れかを用いて設定するようにしているから、GPS衛星からの電波の受信に関与しない領域が開空率検出領域Adに含まれることを抑制し的確な開空率検出領域Adを設定することができると共に、このようにして設定した実際に則した開空率検出領域Adを用いて、第1から第3の予測方法の何れかの方法によって将来の開空率Rsfを算出しているから、実際の開空率に則したより的確な開空率Rsfを予測することができる。したがってこのようにして算出した開空率Rsfを用いてGPSロスト状態の予測を行うことによって、的確な予測を行うことができる。
【0068】
なお、第1の実施の形態において、図2のステップS2で自車速Vownを算出する処理が車速検出手段に対応し、ステップS3の処理が開空率検出領域設定手段に対応し、ステップS4の処理が将来開空率推定手段に対応し、ステップS6の処理がGPSロスト推定手段に対応し、ステップS7の処理が確度検出手段に対応し、ステップS8の処理がロスト通知手段に対応している。
【0069】
次に、本発明の第2の実施の形態を説明する。
この第2の実施の形態は、上記第1の実施の形態における自動操舵制御装置において、GPSロスト状態に移行すると予測されるときには、自車両を減速させるようにしたものであって、基本的な構成は上記第1の実施の形態と同様であるので、同一部の詳細な説明は省略する。
図18は、第2の実施の形態において実行される演算処理の処理手順の一例を示すフローチャートである。この演算処理は、例えば予め設定した所定周期で実行される。
図18のステップS11及びステップS12の処理は、上記第1の実施の形態における図2のステップS1及びステップS2の処理と同様であって、ナビゲーション装置35から所定の道路地図情報や自車両の現在位置情報を読み込むと共に、各種センサからの検出信号を読み込み、自車速Vownを算出する。
【0070】
次いで、ステップS13に移行し、目標走行車速を設定する。この目標走行車速は、自車速Vownを標準走行車速Vnormに制御し得る値に設定する。そして、自車速Vownが目標走行車速となるように、駆動トルク制御ユニット12や制動流体圧制御回路7を制御し、駆動力或いは制動力を発生させて自車両が目標走行車速となるように車速制御を行う。
なお、後段のステップS24の処理で設定される減速フラグFsdを参照し、これが“1”であって減速制御中であることを表す場合には、ステップS22の処理で設定される車速パターンにしたがって公知の手順で減速制御を行う。
【0071】
次いで、ステップS14に移行し、公知の手順で自動操舵制御処理を行う。すなわち、ナビゲーション装置35からの、GPS測位によって得た自車両の現在位置情報に基づいて、自車両が目標とする経路に沿って走行するように、転舵モータ20を駆動制御し操舵制御を行う。また、GPS測位が不可となり、後述のステップS26でデッドレコニングにより自車両の現在位置を推測している場合にはこのデッドレコニングにより推定し所定の記憶領域に格納している現在位置推定値に基づいて操舵制御を行う。
【0072】
次いで、ステップS15に移行する。このステップS15からステップS20の処理は、前記図2のステップS3からステップS8の処理と同様であって、将来の開空率Rsfを推測し、ロスト確度Plを推定し、これに基づいてGPSロスト状態となるかどうかを判定し、GPSロスト状態となるときにはドライバに対してこれを通知する。なお、GPSロスト状態となることのドライバへの通知は、後述のステップS24の処理での減速度の発生をもってして行うようにしてもよい。
【0073】
次いで、ステップS21に移行し、ロスト時誘導可能距離を設定する。このロスト時誘導可能距離は、走行中の道路の前方のカーブ状況から、GPSロスト状態が継続しデッドレコニングにより自車両の現在位置を推測しこれに基づき自動操舵を行った際に、目標経路と自車両の現在位置との位置誤差が許容範囲を保った状態で自車両を停止に導くことの可能な距離である。このロスト時誘導可能距離は、例えば、直線の場合には例えば70〔m〕程度に設定し、カーブ路の場合には、カーブ路半径が中程度の場合には50〔m〕程度、カーブ路半径が小さい場合には30〔m〕程度に設定する。なお、走行中の道路のカーブ状況は、ナビゲーション装置35から獲得すればよい。
【0074】
次いで、ステップS22に移行し、自車両を、現在位置から、ステップS21で設定したロスト時誘導可能距離だけ先の地点で停止させるために必要な車速パターンを設定し、この車速パターンに沿って自車両を減速させる際の、減速開始点を逆算して算出する。
なお、停止するまでの車速パターンは、例えば、予め設定した減速度(例えば、0.2G)として設定しておけばよい。
【0075】
次いで、ステップS23に移行し、自車両がステップS22で設定した減速開始点に到達したかどうかを判断し、減速開始点に到達していなければステップS25に移行する。また、ステップS20でロスト状態に移行すると予測されないときにも減速開始点に到達していないと判断しステップS25に移行する。
一方、減速開始点に到達していれば、ステップS24に移行し、車速の減速制御の開始と判断し、減速フラグFsdを減速中であることを表す“1”に設定する。
【0076】
次いで、ステップS25に移行し、GPSロスト状態であるか、すなわち、高精度な自車両の位置計測を行うことができない状態であるかどうかを判断する。そして、GPS衛星からの電波を十分受信可能な状態であって高精度に位置計測を行うことができる状態であるときには,GPSロスト状態ではないと判断しステップS27に移行する。
【0077】
一方、GPS衛星からの電波を受信することができない状態、又は、高精度な位置計測を行うためのGPS衛星からの電波を十分に受信することができない場合には、GPSロスト状態であると判断し、ステップS26に移行して公知の手順でデッドレコニング処理を行う。つまり、車輪速度センサ22FL〜22RRからの車輪速度、ヨーレートセンサ16からのヨーレートφ、加速度センサ15からの横加速度Yg等、各種センサの検出信号に基づいて自車両の現在位置を推定しこの現在位置推定値を所定の記憶領域に格納する。また、この現在位置推定値を、ナビゲーション装置35にも供給し、引き続き自車両前方の道路地図情報をナビゲーション装置35から取得する。
【0078】
次いで、ステップS27に移行し、GPSロスト状態から復帰したかどうかを判断する。すなわち高精度な位置計測を行うことができる状態に復帰したかどうかを判断し、ロスト状態から復帰したと判断されるときにはステップS28に移行し、減速処理を終了し、減速フラグFsdを減速中ではないことを表す“0”に設定した後、演算処理を終了する。一方、GPSロスト状態から復帰していないと判断されるとき、つまり、十分な位置計測を行うことができない場合には、ステップS29に移行し、ドライバが操舵操作を行っている状態かどうか、すなわち、手動操舵に切り換わったかどうかを判断し、手動操舵に切り換わった場合には、ステップS28に移行し、減速制御を終了する。一方、手動操舵を行っていない場合にはそのまま処理を終了する。
なお、手動操舵に切り換わったかどうかの判断は、例えば、ステアリングコラム内に内蔵されたトルクセンサに予め設定したしきい値以上のトルクがかかっているかどうかを検出すること等により行う。
【0079】
次に、上記第2の実施の形態の動作を説明する。
コントロールユニット8では、図18に示す演算処理を所定周期で実行し、自車両が標準走行車速Vnormで走行するよう、車速制御を行うと共に(ステップS13)、GPS測位により検出した自車両の現在位置またはデッドレコニングにより検出した自車両の推定現在位置に基づいて自車両が目標経路に沿って走行するよう転舵モータ20を駆動制御し、操舵制御処理を実行し自動操舵制御を行う(ステップS14)。
【0080】
また、前方カメラ31の撮像画像に基づいて上記第1の実施の形態で説明した手順で、将来の開空率Rsfを予測しこれに基づいてこの先、GPSロスト状態となるかどうかを予測する。そして、GPSロスト状態とはならないと予測されるときには引き続きGPS測位による自車両の現在位置に基づいて自動操舵制御を行うと共に、標準走行車速Vnormで走行するよう速度制御を行う。
【0081】
一方、この先GPSロスト状態となると予測されるときには、ステップS20でロスト状態となることがドライバに通知されると共に、ロスト時誘導可能距離が算出されて減速開始点が設定され(ステップS21、S22)、自車両が減速開始点に達していないときには、ステップS25からステップS27、ステップS29を経て引き続きGPS測位による自車両の現在位置に基づいて自動操舵制御を行うと共に、標準走行車速Vnormで走行するように速度制御が行われるが、自車両が減速開始点に到達すると、ステップS23からステップS24に移行し、減速フラグFsdを“1”に設定する。このため、車速制御処理(ステップS13)では、減速フラグFsdが“1”であることから、指定された車速パターンでの減速制御を開始し、自車両は減速する。
【0082】
そして、GPSロスト状態となっていない間は、引き続き自動操舵が行われると共に減速が行われ、この状態からGPSロスト状態となると、ステップS25からステップS26に移行し、デッドレコニングによる自車両の現在位置の推定が開始される。このため、デッドレコニングによる推定現在位置に基づいて自動操舵制御が行われ、引き続き減速が継続される。そして、GPSロスト状態となることのドライバへの通知やデッドレコニングによる現在位置の推定に伴ってドライバがステアリングホイールを握りその操作を開始すると、ステップS29からステップS28に移行し、減速制御を終了し、減速フラグFsdを“0”に設定する。このため、車速制御処理(ステップS13)では、減速フラグFsdが“0”であることから自車両が標準走行車速Vnormとなるように車速制御を開始し、自車両は標準走行車速Vnormで走行する状態に移行する。
【0083】
つまり、ドライバが手動操舵を開始したことから、自車両を停止させる必要はないため、減速制御に換えて標準走行車速Vnormでの走行制御が開始され、手動操舵による操舵制御が行われつつ、標準走行車速Vnormでの走行状態に移行することになる。
一方、ドライバが手動操舵を行わない場合には、引き続き減速制御が行われることから、減速開始点に到達した時点から、ロスト時誘導可能距離が経過した時点で、自車両は停止することになる。したがって、デッドレコニングによる推定現在位置に基づく自動操舵制御の制御精度を確保することができない時点で自車両は停車することになって、制御精度を確保することができない状態で自動操舵制御が継続されることが回避される。
【0084】
このように、GPSロスト状態を予測し、GPSロスト状態に移行すると予測されるときには、これをドライバに通知し、GPSロスト時の制御精度を確保することの可能な状態で自車両が停車するように減速を行うようにしたから、上記第1の実施の形態と同様の作用効果を得ることができると共に、予め設定した車速パターンで減速するようにしているから、ドライバが手動操舵を行わなかった場合であっても、十分余裕をもって減速し自車両を停車させることができ、また、自車両に急に減速度が発生することなく停車させることができる。
【0085】
なお、上記第2の実施の形態においては、車速パターンとして、予め設定した減速度(例えば、0.2G)で減速する場合について説明したが、これに限るものではなく、前記ステップS19で算出したGPSロスト確度Plに応じて車速パターンを変更してもよい。例えば、GPSロスト状態となるロスト確度が低いときほど減速度を大きくし、より遅い段階で減速を開始し、実際にロスト状態となったときに比較的大きな減速度で減速させるようにしてもよい。このようにすることによって、実際にはGPSロスト状態とはならないにも関わらず、減速度が発生することによってドライバに違和感を与えることを回避することができる。
ここで、上記第2の実施の形態において、ナビゲーション装置35が、GPS測位手段に対応し、図18のステップS14、ステップS21からステップS28の処理が走行制御手段及び減速制御手段に対応し、ステップS19の処理が確度検出手段に対応している。
【0086】
次に、本発明の第3の実施の形態を説明する。
この第3の実施の形態は、上記第1の実施の形態における自動操舵制御装置において、GPSロスト状態に移行すると予測されるときには、自車両を減速させるようにしたものであって、基本的な構成は上記第1の実施の形態と同様であるので、同一部の詳細な説明は省略する。
図19は、第3の実施の形態において実行される演算処理の処理手順の一例を示すフローチャートである。この演算処理は、例えば、予め設定した所定周期で実行される。
【0087】
図19において、ステップS11からステップS20は、上記第2の実施の形態における図18のステップS11からステップS20の処理と同一であって、自車両が目標経路に沿って走行するように自動操舵制御を行うと共に標準走行車速Vnormで走行するように車速制御を行う。また、自車両前方の撮像画像に基づいて上記第1の実施の形態の手順で、GPSロスト状態となるかどうかを予測し、GPSロスト状態となると予測されるときには、ロスト確度Plを算出すると共に、GPSロスト状態となることをドライバに通知する。なお、この報知は、後述の操舵制御方法の変更をもってして行うようにしてもよい。そして、GPSロスト状態が生じると予測されないときにはステップS31からステップS11に戻って引き続き自動操舵制御及び車速制御を継続する。
【0088】
一方、GPSロスト状態となると予測されるときにはステップS31からステップS32に移行し、GPSロスト状態となった場合に備えて操舵制御方法の変更を行う。具体的には、後述の操舵制御の終了処理が開始されるまで所定時間となった時点で、ステップS19で算出したGPSロストのロスト確度Plに基づき、ドライバが手動操舵を開始する可能性を推測し、手動操舵を開始する可能性が高いときにはドライバの操舵介入に備えてこの操舵介入を許容する操舵制御を行う。
【0089】
つまり、ロスト確度Plが高いときには、手動操舵への切り換わりに備えて、実際に手動操舵に切り換わる以前に、ドライバが手動操舵を開始する可能性が高いと判断し、ドライバの操舵介入による目標経路と自車両の走行位置との間の位置誤差の拡大よりも、ドライバの操舵介入を許容し、前以って手動操舵を開始することにより実際の手動操舵時には手動操舵へのスムーズな切り換わりを重視して、自動操舵制御における制御ゲインを小さくする。逆に、ロスト確度Plが低いときには、手動操舵をすぐには開始せず、しばらくは様子をみる可能性が高いと判断し、手動操舵へのスムーズな切り換わりよりも、位置誤差の拡大を抑えることを重視して自動操舵制御における制御ゲインを高める。
【0090】
このようにして、操舵制御方法の変更を行ったならば、ステップS33に移行し、操舵制御の終了タイミングを設定する。この操舵制御の終了処理の開始タイミングは、GPSロスト状態に移行すると予測される時間が経過した時点とし、GPSロスト状態に移行すると予測される時間が経過したとき、すなわち、GPSロスト状態となったときに操舵制御の終了処理を実行する。
【0091】
なお、デッドレコニング等によりGPSロスト後にもしばらく操舵制御を継続可能とする時間を設ける場合には、その継続時間(例えば、3秒間)を考慮し、GPSロストの予測される時間からさらにデッドレコニングの継続時間が経過した時点を、操舵制御の終了処理の開始タイミングとして設定してもよい。また、前記GPSロストが生じる予測時間を得ることができない場合には、予め設定した所定時間が継続したとき終了すればよい。
【0092】
続いて、ステップS34に移行し、自車両が操舵制御の終了処理の開始地点に到達したかどうかを判断する。この操舵制御の終了処理の開始地点は、前記ステップS33で設定した操舵制御の終了処理の開始タイミングと自車速Vownとに基づいて設定される。
そして、自車両が操舵制御の終了処理の開始地点に到達していなければ、そのまま処理を終了し、開始地点に到達したならばステップS35に移行し、操舵制御の終了処理を実行する。具体的には、ドライバに対して自動操舵を終了することを通知する等の処理を行い、ステップS14での自動操舵制御処理を終了させる。
【0093】
このように、第3の実施の形態においては、自車両がGPSロスト状態となると予測されない間は、GPS測位による自車両の現在位置に基づいて自動操舵制御が行われると共に、標準走行車速Vnormで走行するよう車速制御が行われるが、前方開空率Rsnowから予測される将来の開空率Rsfに基づいてGPSロスト状態となると予測されるときには、実際に手動操舵に切り換わる以前にドライバが手動操舵を開始すると予測し、GPSロストの確度Plに応じて、ステップS13での自動操舵制御における制御ゲインを調整し、ドライバが操舵介入を行うと予測されるときほど制御ゲインを小さくして手動操舵による操舵介入を許容するようにしたから、手動操舵への切り換わりをスムーズに行うことができる。
【0094】
また、このとき、ロスト確度Plに応じてドライバが手動操舵を行う可能性を推測し、これに応じて制御ゲインを調整するようにしているから、実際にはドライバが操舵介入を行っているのではないにも関わらず、操舵介入が許容されて、目標経路との位置誤差が大きくなったり、或いは、ドライバが手動操舵を行う意志があるにも関わらず、操舵介入が許容されないといった状態となったりすることを回避し、ドライバの手動操舵の意志に応じて的確に自動操舵制御を行うことができる。
【0095】
なお、前記第2の実施の形態と第3の実施の形態とを組み合わせて、GPSロスト状態となると予測されるときには、自動操舵制御における操舵制御方法の変更を行うと共に、減速制御をも行うようにしてもよい。また、自動操舵制御や減速制御を行う場合に限らず、GPS測位を行うGPS測位手段を備えると共に、このGPS測位により得た自車両の現在位置に基づいて車両の走行制御を行う走行制御手段を備えた車両であっても適用することができる。
ここで、上記第3の実施の形態において、ナビゲーション装置35がGPS測位手段に対応し、図19のステップS14、ステップS31からステップS35の処理が走行制御手段及び減速制御手段に対応し、ステップS19の処理が確度検出手段に対応している。
【0096】
次に、本発明の第4の実施の形態を説明する。
この第4の実施の形態は、上記第1の実施の形態において、将来の開空率Rsfに基づいてGPSロスト状態となるかどうかを予測するためのしきい値Rsθを、大気の状態に応じて補正するようにしたものである。その基本的な構成は上記第1の実施の形態と同様であるので同一部の詳細な説明は省略する。
図20は、将来の開空率Rsfのしきい値を補正するためのしきい値補正処理の処理手順の一例を示すフローチャートである。このしきい値補正処理は、コントロールユニット8において、予め設定された所定周期で実行される。
【0097】
このしきい値補正処理では、まず、ステップS41で、GPSロスト状況を検出し、現時点におけるGPS衛星の電波の取得状況を検出する。
そして、GPS衛星からの電波を受信することができずロスト状態にあるか、或いは、GPS衛星からの電波を受信することはできるが高精度な位置計測を行うことは困難な状態にあるか、或いは、GPS衛星からの電波を良好に受信し高精度な位置計測を行うことが可能な状態にあるかを判断する。
次いで、ステップS42に移行し、ステップS41で検出した衛星取得状況から、GPSロスト状態となったと判断されるとき、この時点における、自車両上空の開空率Rsownを検出しこれを所定の記憶領域に格納する
【0098】
この現地点における開空率Rsownは、前記図2のロスト予測処理において推測した将来の開空率Rsfを用いてもよいが、例えば、全周囲カメラ等によって実際に自車両上空を含む、GPS衛星からの電波の受信に影響を及ぼす自車両上空を撮像し、この撮像画像に基づいて、第1の実施の形態において説明した、前方の撮像画像における開空率Rsfの算出方法と同様の手順で実際に算出するようにしてもよい(ロスト開空率検出手段)。
【0099】
なお、このGPSロスト時における自車両上空の開空率Rsownは、例えば、1日の走行開始時からGPSロスト状態となる毎に検出し、同一日における、GPSロスト状態となったときの、自車両上空の開空率Rsownを収集する(受信状況検出手段)。
次いで、ステップS43に移行し、所定の記憶領域に格納しているある一日のこれまでの自車両上空の開空率Rsownについてその標準偏差の中央値を算出する。
そして、この標準偏差の中央値に基づいてこれに相当する開空率Rsを算出し、これを前記図2のロスト予測処理のステップS6で用いられる将来の開空率のしきい値Rsθとして設定する(しきい値補正手段)。そして、処理を終了する。
【0100】
ここで、GPS衛星からの電波の取得状況は、開空率だけでなく大気の状態等による影響も受ける。この第4の実施の形態では、上述のようにGPSロスト状態となったときの開空率、すなわち大気状態による影響が含まれる開空率を検出し、これに基づいて、GPSロスト状態となるかどうかを判断するための将来の開空率Rsのしきい値Rsθを更新しているから、大気状態による電波の受信状況を考慮してGPSロスト状態に移行するかどうかを判断することができる。したがって、大気状態が変化した場合であっても,GPSロスト状態となるかどうかを的確に予測することができる。
【0101】
なお、ここでは、自車両上空の開空率Rsownを一日の始まりの時点から蓄積するようにした場合について説明したが、一日の時間帯によっても大気状態は変化することから例えば、同一時間帯における開空率Rsownを、標準偏差の中央値の算出に用いるようにしてもよい。また、地域によっても大気状態は変化することから、例えば、自車両位置を基準としてある範囲内において収集した開空率Rsownのみを用いて標準偏差の中央値の算出を行うようにしてもよい。
また、ここでは、上記第1の実施の形態に適用した場合について説明したが、上記第2及び第3の実施の形態に適用してもよいことは言うまでもない。
【0102】
次に、本発明の第5の実施の形態を説明する。
この第5の実施の形態は、上記第1の実施の形態において、将来の開空率Rsfに基づいてGPSロスト状態となるかどうかを予測するためのしきい値Rsθを、自車両の上を横断する横断物に対応して補正するようにしたものである。その基本的な構成は上記第1の実施の形態と同様であるので同一部の詳細な説明は省略する。
図21は、第5の実施の形態におけるしきい値補正処理の、第5の実施の形態における処理手順の一例を示すフローチャートである。このしきい値補正処理は、コントロールユニット8において、予め設定された所定周期で実行される。
このしきい値補正処理では、まず、ステップS51で、自車両進行路真上に位置する遮蔽物を検出する(上空遮蔽物検出手段)。
【0103】
この遮蔽物の検出は、例えば、図22に示すように、前方カメラ31で撮像した撮像画像に基づき空の領域が上下に分断されているかどうかを検出することによって行う。この判断は、撮像画像における空の領域の位置情報と、非空領域の位置情報とをもとに、空の領域の間に非空領域が存在するかどうかを判断すること等により行う。
そして、進行路真上に遮蔽物が存在する場合には、この遮蔽物までの距離を算出する。この距離の算出は、例えば、ステレオ視、或いは自車両の時刻t1における撮像画像と時刻t2における撮像画像の比較により三角法を用いて算出する。
【0104】
なお、空の領域の分断を検出する領域は、図22に示すように、仰角ラインLe以上の領域に限るものではなく、例えば、図23に示すように、自車両の真上に相当する領域に狭めるようにしてもよい。
また、例えば、自車両の走行路上の自車両正面に該当する走行路幅相当の領域に物体が存在するかどうかを判断するようにしてもよい。つまり、自車両の走行路上の正面に少なくとも走行路幅相当の物体が存在する場合、これは、すなわちトンネル等であって、自車両の真上に遮蔽物が存在するとみなすことができる。
【0105】
そして、このようにして、自車両の進行路真上に遮蔽物が存在すると判断されるときには、ステップS52に移行し、例えば、図24(a)、図24(b)に示すように、進行路真上に存在する物体を検出し、オプティカルフローに基づいて、この進行路真上の遮蔽物が自車両に到達するまでの、到達時間を算出する。
また、例えば、図25(a)、図25(b)に示すように、例えば、自車両の走行路上を横切る横断道路に相当するテンプレートを用意しておき、テンプレートマッチングを行うことによって、経路の頭上に位置する物体を検出し、その拡大度合から、物体が自車両の位置に到達するまでの時間を算出するようにしてもよい。
【0106】
このようにして、自車両の進行路真上の遮蔽物の有無を検出し、この遮蔽物が自車両に到達するまでの所用時間を算出したならば、ステップS53に移行する。そして、自車両の進行路真上に遮蔽物を検出したならば、この遮蔽物が自車両の上を通過する際には、上空の開空率に関わらず、GPS衛星の取得が不可となるため、自車両がこの遮蔽物の下を通過する通過開始地点から一時的に、前記図2のロスト予測処理のステップS6でGPSロスト状態となるかどうかを判断するための、将来の開空率Rsfのしきい値Rsθを、比較的大きなしきい値Rsθ2に設定する(しきい値補正手段)。
【0107】
このしきい値Rsθ2は、開空率Rsfが高い場合であっても、GPSロスト状態に移行すると判断し得る値に設定される。また、このしきい値Rsθ2への変更は、自車両がこの遮蔽物の下を通過し始める時点から、自車両がこの遮蔽物の下を通過し終え、ナビゲーション装置35において、GPS衛星からの電波の受信を再開し高精度な位置計測を行うことが可能となるまでの時間に設定される。
そして、このようにして将来の開空率Rsfの補正が終了したならば、しきい値補正処理を終了する。
【0108】
このように、この第5の実施の形態においては、自車両の真上に遮蔽物が位置し、自車両が遮蔽物の下を通過すると予測されるときには、自車両がこの遮蔽物の下を通過する際に、所定時間、GPSロスト状態となるかどうかを予測するための将来の開空率Rsfのしきい値Rsθを、GPSロストと判断し得ない値に設定するようにしたから、開空率RsfからはGPSロスト状態となるとは判断されない場合であっても、自車両が遮蔽物の下を通過することによりGPSロスト状態となることを確実にドライバに通知することができる。
【0109】
なお、この第5の実施の形態においては、上記第1の実施の形態に適用した場合について説明したが、これに限るものではなく、上記第2及び第3の実施の形態に適用することも可能であり、また、上記第4の実施の形態に適用し、大気状態及び真上の遮蔽物の存在に応じて開空率のしきい値Rsθを補正するようにしてもよい。
【0110】
次に、本発明の第6の実施の形態を説明する。
この第6の実施の形態は、上記第1の実施の形態において、将来の開空率Rsfに基づいてGPSロスト状態となるかどうかを予測するためのしきい値Rsθを、実際のGPSロスト状態の発生状況に応じて補正するようにしたものである。その基本的な構成は上記第1の実施の形態と同様であるので同一部の詳細な説明は省略する。
図26は、第6の実施の形態におけるしきい値補正処理の処理手順の一例を示すフローチャートである。このしきい値補正処理は、コントロールユニット8において、予め設定された所定周期で実行される。
【0111】
このしきい値補正処理において、ステップS61及びステップS62の処理は、第4の実施の形態における、図20のステップS41及びステップS42の処理と同様であって、GPS衛星からの電波の取得状況を検出し、GPSロスト状態となったときの現時点における自車両上空の開空率Rsownを算出する(ロスト開空率検出手段)。
次いで、ステップS63に移行し、GPSロスト状態であるときの現時点における自車両上空の開空率Rsownと、GPSロスト状態への移行を予測するための将来の開空率のしきい値Rsθとを比較し、自車両上空の開空率Rsownがしきい値Rsθ以下であるときには、そのまま処理を終了するが、自車両上空の開空率Rsownがしきい値Rsθ以上であるときには、ステップS64に移行する。
【0112】
このステップS64では、自車両上空の開空率Rsownがしきい値Rsθ以上である場合、本来GPSロスト状態になるとは予測されないはずであるが、それにも関わらずGPSロスト状態となっている状態であって、GPSロスト状態の予測が的確に行われていない状態であるから、GPS衛星からの電波の取得が困難な地点であるとして、この時点における現在位置のノード情報と、自車両上空の開空率Rsownとを対応付けて所定の記憶領域に格納する(ロスト地点情報収集手段)。
【0113】
なお、ステップS63で、自車両がこの地点を通過したときに自車両上空の開空率Rsownがしきい値Rsθ以上であると判断される回数が予め設定したしきい値以上継続したときに、この時点における自車両上空の開空率Rsownを現在地点のノード情報と対応付けて所定の記憶領域に格納するようにしてもよく、また、自車両上空の開空率Rsownがしきい値Rsθ以上であると判断されるときその開空率Rsownを所定の記憶領域に格納しておき、自車両上空の開空率Rsownがしきい値Rsθ以上であると判断される回数が予め設定したしきい値以上継続したときにこの間の開空率Rsownの平均値をノード情報と対応付けて格納するようにしてもよい。
【0114】
そして、ステップS65に移行し、自車両が所定領域に格納されている開空率Rsownと対応付けられたノード情報に該当する地点に位置するとき、現在位置に応じたノード情報に対応する開空率Rsownを、しきい値Rsθとして設定する。そして、自車両が該当ノード地点を含む所定領域の範囲外に移動したとき、もとのしきい値Rsθに戻す(しきい値補正手段)。そして、処理を終了する。
【0115】
このように、この第6の実施の形態においては、実際にGPSロスト状態となったときの開空率Rsownに基づいて、GPSロスト状態となるかどうかを判断するためのしきい値Rsθを更新し、しきい値Rsθをより実際に則した値に補正するようにしているから、開空率Rsfに基づいてGPSロスト状態となるかどうかの判断をより的確に行うことができる。
なお、ここでは、上記第1の実施の形態に適用した場合について説明したが、これに限るものではなく上記第2から第5の実施の形態に適用することができることはいうまでもない。
【図面の簡単な説明】
【0116】
【図1】本発明を適用した自動操舵制御装置の一例を示す概略構成図である。
【図2】図1のコントロールユニットで実行されるロスト予測処理の処理手順の一例を示すフローチャートである。
【図3】道路地図情報の構成を示す説明図である。
【図4】仰角ラインの設定方法を説明するための説明図である。
【図5】仰角ラインの設定方法を説明するための説明図である。
【図6】仰角ラインを走行経路に沿って設定する場合の設定方法を説明するための説明図である。
【図7】先行車両が存在するときの仰角ラインの設定方法を説明するための説明図である。
【図8】遮蔽物を考慮して仰角ラインを設定する場合の設定方法を説明するための説明図である。
【図9】テンプレートを用いて将来の開空率を推定する場合の推定方法を説明するための説明図である。
【図10】テンプレートを用いて将来の開空率を推定する場合の推定方法を説明するための説明図である。
【図11】テンプレートを用いて将来の開空率を推定する場合の効果の説明に供する説明図である。
【図12】GPS衛星の分布状況を考慮して将来の開空率を補正する場合の補正方法を説明するための説明図である。
【図13】GPS衛星の分布状況と遮蔽物に応じて将来の開空率を補正する場合の補正マップである。
【図14】オプティカルフローを用いて将来の開空率を推定する場合の推定方法を説明するための説明図である。
【図15】オプティカルフローを用いて将来の開空率を推定する場合の推定方法を説明するための説明図である。
【図16】オプティカルフローを用いて将来の開空率を推定する場合の効果の説明に供する説明図である。
【図17】ロスト確度マップの一例である。
【図18】第2の実施の形態において、コントロールユニットで実行される演算処理の処理手順の一例を示すフローチャートである。
【図19】第3の実施の形態において、コントロールユニットで実行される演算処理の処理手順の一例を示すフローチャートである。
【図20】第4の実施の形態において、コントロールユニットで実行されるしきい値補正処理の処理手順の一例を示すフローチャートである。
【図21】第5の実施の形態において、コントロールユニットで実行されるしきい値補正処理の処理手順の一例を示すフローチャートである。
【図22】自車両上空の遮蔽物の検出方法を説明するための説明図である。
【図23】自車両上空の遮蔽物の検出方法を説明するための説明図である。
【図24】自車両上空の遮蔽物に自車両が到達するまでの所用時間の算出方法を説明するための説明図である。
【図25】自車両上空の遮蔽物に自車両が到達するまでの所用時間の算出方法を説明するための説明図である。
【図26】第6の実施の形態において、コントロールユニットで実行されるしきい値補正処理の処理手順の一例を示すフローチャートである。
【符号の説明】
【0117】
1 ブレーキペダル
5FL〜5RR 左前輪〜右後輪
6FL〜6RR ホイールシリンダ
7 制動流体圧制御回路
8 コントロールユニット
9 エンジン
10 自動変速機
11 スロットルバルブ
12 駆動トルク制御ユニット
15 加速度センサ
16 ヨーレートセンサ
17 マスタシリンダ圧センサ
18 アクセル開度センサ
19 操舵角センサ
20 操舵モータ
21 ステアリングホイール
22FL〜122RR 車輪速度センサ
23 警報装置
31 前方カメラ
32 カメラコントローラ
35 ナビゲーション装置
【特許請求の範囲】
【請求項1】
自車両上空の予め設定したGPS受信エリアにおいて空が占める割合である開空率を前以って推定し、この推定した開空率に基づいて、GPS衛星からの電波に基づく測位が不可となるGPSロストが生じるかどうかを予測するGPSロストの予測方法であって、
自車両前方の走行路を撮像した撮像画像上で、前記走行路上の予め設定した前方地点に相当する位置に、当該前方地点での前記GPS受信エリアに相当する領域を開空率検出領域として設定し、
この開空率検出領域内の画像に基づき、前記前方地点での実際の開空率を推定することを特徴とするGPSロストの予測方法。
【請求項2】
自車両上空の予め設定したGPS受信エリアにおいて空が占める割合である開空率を前以って推定し、この推定した開空率に基づいて、GPS衛星からの電波に基づく測位が不可となるGPSロストが生じるかどうかを予測するGPSロストの予測装置であって、
自車両の走行路前方を撮像する撮像手段と、
当該撮像手段の撮像画像上で、前記走行路上の予め設定した前方地点に相当する位置に、当該前方地点での前記GPS受信エリアに相当する領域を、開空率検出領域として設定する開空率検出領域設定手段と、
当該開空率検出領域設定手段で設定した前記開空率検出領域内の画像に基づいて前記前方地点で実際に前記GPS受信エリアを撮像したときの撮像画像を予測し、この撮像画像上での前記GPS受信エリアに相当する領域において空に相当する領域が占める割合を推定し、これを前記前方地点における将来の開空率とする将来開空率推定手段と、
当該将来開空率推定手段で推定した将来の開空率が予め設定したしきい値以下であるとき前記GPSロストが生じると推定するGPSロスト推定手段と、を備えることを特徴とするGPSロストの予測装置。
【請求項3】
前記開空率検出領域設定手段は、前記前方地点での、予め設定した仰角設定値以上の領域に相当する、前記撮像画像上での領域を、前記開空率検出領域として設定することを特徴とする請求項2記載のGPSロストの予測装置。
【請求項4】
車速を検出する車速検出手段を備え、
前記開空率検出領域設定手段は、前記車速検出手段で検出される車速が高速であるときほど前記開空率検出領域の範囲を狭くすることを特徴とする請求項2又は請求項3記載のGPSロストの予測装置。
【請求項5】
前記開空率検出領域設定手段は、前記撮像画像における自車両前方の走行経路を検出する走行経路検出手段を備え、
当該走行経路手段で検出した走行経路の位置に応じて前記開空率検出領域の範囲を狭くすることを特徴とする請求項2から請求項4の何れか1項に記載のGPSロストの予測装置。
【請求項6】
前記開空率検出領域設定手段は、前記撮像画像において自車両の走行路前方の移動物体を検出する移動物体検出手段を備え、
当該移動物体検出手段で移動物体を検出したとき、当該移動物体を除く範囲を前記開空率検出領域として設定することを特徴とする請求項2から請求項5の何れか1項に記載のGPSロストの予測装置。
【請求項7】
前記開空率検出領域設定手段は、前記GPS衛星からの電波の受信の妨げとなり得る遮蔽物の位置及び高度情報を獲得する遮蔽物情報獲得手段を備え、
当該遮蔽物情報獲得手段で獲得した前記遮蔽物の位置及び高度情報に基づいて前記開空率検出領域を狭くすることを特徴とする請求項2から請求項6の何れか1項に記載のGPSロストの予測装置。
【請求項8】
前記将来開空率推定手段は、前記開空率検出領域において空に相当する領域の占める割合を検出する前方開空率推定手段を備え、
当該前方開空率推定手段で推定した前記開空率検出領域における開空率を、前記将来の開空率とすることを特徴とする請求項2から請求項7の何れか1項に記載のGPSロストの予測装置。
【請求項9】
前記将来開空率推定手段は、前記撮像画像間での、前記開空率検出領域の空ではない領域内の物体の推移状況から、前記開空率検出領域内の空の領域についてその未来の推移状況を予測し、当該予測結果に基づいて前記将来の開空率を推定することを特徴とする請求項2から請求項8の何れか1項に記載のGPSロストの予測装置。
【請求項10】
前記将来開空率推定手段は、前記撮像画像における、前記開空率検出領域の空ではない領域内の物体の特徴点を検出し、当該特徴点の前記撮像画像間での推移状況から、前記開空率検出領域内の空の領域の未来の推移状況を予測することを特徴とする請求項9記載のGPSロストの予測装置。
【請求項11】
前記将来開空率推定手段は、前記開空率検出領域の空ではない領域内の物体のオプティカルフローを検出し、当該オプティカルフローに基づいて前記開空率検出領域の空の領域の未来の推移状況を予測することを特徴とする請求項9記載のGPSロストの予測装置。
【請求項12】
前記将来開空率推定手段は、自車両前方のGPS衛星の配置状況を検出するGPS衛星配置状況検出手段を備え、
前記GPS衛星の配置密度の高い領域と、前記遮蔽物の多い領域との位置関係に基づいて前記将来開空率を補正することを特徴とする請求項2から請求項11の何れか1項に記載のGPSロストの予測装置。
【請求項13】
自車両の上空を遮蔽する遮蔽物を検出する上空遮蔽物検出手段と、
当該上空遮蔽物検出手段で前記遮蔽物を検出したとき、自車両が前記遮蔽物の下を通過する期間を含む所定期間の間、前記しきい値を、GPSロストが生じると推測し得ない値に補正するしきい値補正手段を備えることを特徴とする請求項2から請求項12の何れか1項に記載のGPSロストの予測装置。
【請求項14】
前記GPSロストが生じたときこの時点における前記開空率を検出するロスト開空率検出手段と、
当該ロスト開空率検出手段で検出した、前記GPSロストが生じたときの開空率に基づいて前記GPS衛星からの電波の受信状況を検出する受信状況検出手段と、
当該受信状況検出手段での検出状況に応じて前記しきい値を補正するしきい値補正手段と、を備えることを特徴とする請求項2から請求項13のいずれか1項に記載のGPSロストの予測装置。
【請求項15】
前記GPSロストが生じたときこの時点における前記開空率を検出するロスト開空率検出手段と、
当該ロスト開空率検出手段で検出した、前記GPSロストが生じたときの開空率が前記しきい値よりも大きいとき、当該開空率を、前記GPSロストが生じた地点の位置情報と対応付けて所定の記憶領域に格納するロスト地点情報収集手段と、
当該ロスト地点情報収集手段に記憶されている位置情報に相当する地点を走行するとき前記位置情報に対応付けられている開空率に基づいて前記しきい値を補正するしきい値補正手段と、を備えることを特徴とする請求項2から請求項14の何れか1項に記載のGPSロストの予測装置。
【請求項16】
前記GPSロスト推定手段で前記GPSロストが生じると推定されるとき、これを通知するロスト通知手段を備えることを特徴とする請求項2から請求項15の何れか1項に記載のGPSロストの予測装置。
【請求項17】
前記GPSロスト推定手段で前記GPSロストが生じると推定されるときのそのロスト確度を検出する確度検出手段、を備えることを特徴とする請求項2から請求項16の何れか1項に記載のGPSロストの予測装置。
【請求項18】
前記確度検出手段は、前記将来開空率推定手段で推定した将来の開空率とそのしきい値との差が大きいときほど前記ロスト確度が高いと判断することを特徴とする請求項17記載のGPSロストの予測装置。
【請求項19】
前記将来開空率推定手段は、前記開空率検出領域内の画像に基づいて未来の開空率を時系列で推測して前記将来の開空率を推測し、
前記確度検出手段は、前記時系列の開空率のうち、前記しきい値以下の開空率と前記しきい値との差分値の積算値を算出し、
当該積算値が大きいときほど前記ロスト確度が高いと判断することを特徴とする請求項17記載のGPSロストの予測装置。
【請求項20】
GPS衛星からの電波に基づきGPS測位を行うGPS測位手段と、
当該GPS測位手段での測位結果に基づき自車両の走行制御を行う走行制御手段と、
前記請求項2から請求項19の何れか1項に記載のGPSロストの予測装置と、を備えた車両用走行制御装置であって、
前記走行制御手段は、前記GPSロストの予測装置での予測結果に応じて前記走行制御の制御内容を変更することを特徴とする車両用走行制御装置。
【請求項21】
前記GPSロストの予測装置は、前記GPSロスト推定手段で前記GPSロストが生じると推定されるときのそのロスト確度を検出する確度検出手段を備え、
前記走行制御手段は、前記確度検出手段で検出したロスト確度に応じて前記走行制御の制御内容を変更することを特徴とする請求項20に記載の車両用走行制御装置。
【請求項22】
前記走行制御手段は、前記GPS測位手段での測位結果に基づき自車両が目標経路に沿って走行するよう自動操舵制御を行う自動操舵制御手段であって、
前記GPSロストの予測装置で、前記GPSロストが生じると予測されるとき前記自動操舵制御における制御方法を、手動操舵による操舵介入を、より許容する制御方法に変更する制御方法変更手段を備えることを特徴とする請求項20又は請求項21記載の車両用走行制御装置。
【請求項23】
前記走行制御手段は、前記GPS測位手段での測位結果に基づき自車両が目標経路に沿って走行するよう自動操舵制御を行う自動操舵制御手段であって、
前記GPSロストの予測装置で、前記GPSロストが生じると予測されるとき、自車両の車速を予め設定した車速パターンで減速させる減速制御手段を備えることを特徴とする請求項20から請求項22の何れか1項に記載の車両用走行制御装置。
【請求項1】
自車両上空の予め設定したGPS受信エリアにおいて空が占める割合である開空率を前以って推定し、この推定した開空率に基づいて、GPS衛星からの電波に基づく測位が不可となるGPSロストが生じるかどうかを予測するGPSロストの予測方法であって、
自車両前方の走行路を撮像した撮像画像上で、前記走行路上の予め設定した前方地点に相当する位置に、当該前方地点での前記GPS受信エリアに相当する領域を開空率検出領域として設定し、
この開空率検出領域内の画像に基づき、前記前方地点での実際の開空率を推定することを特徴とするGPSロストの予測方法。
【請求項2】
自車両上空の予め設定したGPS受信エリアにおいて空が占める割合である開空率を前以って推定し、この推定した開空率に基づいて、GPS衛星からの電波に基づく測位が不可となるGPSロストが生じるかどうかを予測するGPSロストの予測装置であって、
自車両の走行路前方を撮像する撮像手段と、
当該撮像手段の撮像画像上で、前記走行路上の予め設定した前方地点に相当する位置に、当該前方地点での前記GPS受信エリアに相当する領域を、開空率検出領域として設定する開空率検出領域設定手段と、
当該開空率検出領域設定手段で設定した前記開空率検出領域内の画像に基づいて前記前方地点で実際に前記GPS受信エリアを撮像したときの撮像画像を予測し、この撮像画像上での前記GPS受信エリアに相当する領域において空に相当する領域が占める割合を推定し、これを前記前方地点における将来の開空率とする将来開空率推定手段と、
当該将来開空率推定手段で推定した将来の開空率が予め設定したしきい値以下であるとき前記GPSロストが生じると推定するGPSロスト推定手段と、を備えることを特徴とするGPSロストの予測装置。
【請求項3】
前記開空率検出領域設定手段は、前記前方地点での、予め設定した仰角設定値以上の領域に相当する、前記撮像画像上での領域を、前記開空率検出領域として設定することを特徴とする請求項2記載のGPSロストの予測装置。
【請求項4】
車速を検出する車速検出手段を備え、
前記開空率検出領域設定手段は、前記車速検出手段で検出される車速が高速であるときほど前記開空率検出領域の範囲を狭くすることを特徴とする請求項2又は請求項3記載のGPSロストの予測装置。
【請求項5】
前記開空率検出領域設定手段は、前記撮像画像における自車両前方の走行経路を検出する走行経路検出手段を備え、
当該走行経路手段で検出した走行経路の位置に応じて前記開空率検出領域の範囲を狭くすることを特徴とする請求項2から請求項4の何れか1項に記載のGPSロストの予測装置。
【請求項6】
前記開空率検出領域設定手段は、前記撮像画像において自車両の走行路前方の移動物体を検出する移動物体検出手段を備え、
当該移動物体検出手段で移動物体を検出したとき、当該移動物体を除く範囲を前記開空率検出領域として設定することを特徴とする請求項2から請求項5の何れか1項に記載のGPSロストの予測装置。
【請求項7】
前記開空率検出領域設定手段は、前記GPS衛星からの電波の受信の妨げとなり得る遮蔽物の位置及び高度情報を獲得する遮蔽物情報獲得手段を備え、
当該遮蔽物情報獲得手段で獲得した前記遮蔽物の位置及び高度情報に基づいて前記開空率検出領域を狭くすることを特徴とする請求項2から請求項6の何れか1項に記載のGPSロストの予測装置。
【請求項8】
前記将来開空率推定手段は、前記開空率検出領域において空に相当する領域の占める割合を検出する前方開空率推定手段を備え、
当該前方開空率推定手段で推定した前記開空率検出領域における開空率を、前記将来の開空率とすることを特徴とする請求項2から請求項7の何れか1項に記載のGPSロストの予測装置。
【請求項9】
前記将来開空率推定手段は、前記撮像画像間での、前記開空率検出領域の空ではない領域内の物体の推移状況から、前記開空率検出領域内の空の領域についてその未来の推移状況を予測し、当該予測結果に基づいて前記将来の開空率を推定することを特徴とする請求項2から請求項8の何れか1項に記載のGPSロストの予測装置。
【請求項10】
前記将来開空率推定手段は、前記撮像画像における、前記開空率検出領域の空ではない領域内の物体の特徴点を検出し、当該特徴点の前記撮像画像間での推移状況から、前記開空率検出領域内の空の領域の未来の推移状況を予測することを特徴とする請求項9記載のGPSロストの予測装置。
【請求項11】
前記将来開空率推定手段は、前記開空率検出領域の空ではない領域内の物体のオプティカルフローを検出し、当該オプティカルフローに基づいて前記開空率検出領域の空の領域の未来の推移状況を予測することを特徴とする請求項9記載のGPSロストの予測装置。
【請求項12】
前記将来開空率推定手段は、自車両前方のGPS衛星の配置状況を検出するGPS衛星配置状況検出手段を備え、
前記GPS衛星の配置密度の高い領域と、前記遮蔽物の多い領域との位置関係に基づいて前記将来開空率を補正することを特徴とする請求項2から請求項11の何れか1項に記載のGPSロストの予測装置。
【請求項13】
自車両の上空を遮蔽する遮蔽物を検出する上空遮蔽物検出手段と、
当該上空遮蔽物検出手段で前記遮蔽物を検出したとき、自車両が前記遮蔽物の下を通過する期間を含む所定期間の間、前記しきい値を、GPSロストが生じると推測し得ない値に補正するしきい値補正手段を備えることを特徴とする請求項2から請求項12の何れか1項に記載のGPSロストの予測装置。
【請求項14】
前記GPSロストが生じたときこの時点における前記開空率を検出するロスト開空率検出手段と、
当該ロスト開空率検出手段で検出した、前記GPSロストが生じたときの開空率に基づいて前記GPS衛星からの電波の受信状況を検出する受信状況検出手段と、
当該受信状況検出手段での検出状況に応じて前記しきい値を補正するしきい値補正手段と、を備えることを特徴とする請求項2から請求項13のいずれか1項に記載のGPSロストの予測装置。
【請求項15】
前記GPSロストが生じたときこの時点における前記開空率を検出するロスト開空率検出手段と、
当該ロスト開空率検出手段で検出した、前記GPSロストが生じたときの開空率が前記しきい値よりも大きいとき、当該開空率を、前記GPSロストが生じた地点の位置情報と対応付けて所定の記憶領域に格納するロスト地点情報収集手段と、
当該ロスト地点情報収集手段に記憶されている位置情報に相当する地点を走行するとき前記位置情報に対応付けられている開空率に基づいて前記しきい値を補正するしきい値補正手段と、を備えることを特徴とする請求項2から請求項14の何れか1項に記載のGPSロストの予測装置。
【請求項16】
前記GPSロスト推定手段で前記GPSロストが生じると推定されるとき、これを通知するロスト通知手段を備えることを特徴とする請求項2から請求項15の何れか1項に記載のGPSロストの予測装置。
【請求項17】
前記GPSロスト推定手段で前記GPSロストが生じると推定されるときのそのロスト確度を検出する確度検出手段、を備えることを特徴とする請求項2から請求項16の何れか1項に記載のGPSロストの予測装置。
【請求項18】
前記確度検出手段は、前記将来開空率推定手段で推定した将来の開空率とそのしきい値との差が大きいときほど前記ロスト確度が高いと判断することを特徴とする請求項17記載のGPSロストの予測装置。
【請求項19】
前記将来開空率推定手段は、前記開空率検出領域内の画像に基づいて未来の開空率を時系列で推測して前記将来の開空率を推測し、
前記確度検出手段は、前記時系列の開空率のうち、前記しきい値以下の開空率と前記しきい値との差分値の積算値を算出し、
当該積算値が大きいときほど前記ロスト確度が高いと判断することを特徴とする請求項17記載のGPSロストの予測装置。
【請求項20】
GPS衛星からの電波に基づきGPS測位を行うGPS測位手段と、
当該GPS測位手段での測位結果に基づき自車両の走行制御を行う走行制御手段と、
前記請求項2から請求項19の何れか1項に記載のGPSロストの予測装置と、を備えた車両用走行制御装置であって、
前記走行制御手段は、前記GPSロストの予測装置での予測結果に応じて前記走行制御の制御内容を変更することを特徴とする車両用走行制御装置。
【請求項21】
前記GPSロストの予測装置は、前記GPSロスト推定手段で前記GPSロストが生じると推定されるときのそのロスト確度を検出する確度検出手段を備え、
前記走行制御手段は、前記確度検出手段で検出したロスト確度に応じて前記走行制御の制御内容を変更することを特徴とする請求項20に記載の車両用走行制御装置。
【請求項22】
前記走行制御手段は、前記GPS測位手段での測位結果に基づき自車両が目標経路に沿って走行するよう自動操舵制御を行う自動操舵制御手段であって、
前記GPSロストの予測装置で、前記GPSロストが生じると予測されるとき前記自動操舵制御における制御方法を、手動操舵による操舵介入を、より許容する制御方法に変更する制御方法変更手段を備えることを特徴とする請求項20又は請求項21記載の車両用走行制御装置。
【請求項23】
前記走行制御手段は、前記GPS測位手段での測位結果に基づき自車両が目標経路に沿って走行するよう自動操舵制御を行う自動操舵制御手段であって、
前記GPSロストの予測装置で、前記GPSロストが生じると予測されるとき、自車両の車速を予め設定した車速パターンで減速させる減速制御手段を備えることを特徴とする請求項20から請求項22の何れか1項に記載の車両用走行制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】

【図12】

【図13】
【図14】
【図15】

【図16】
【図17】
【図18】
【図19】
【図20】

【図21】
【図22】
【図23】

【図24】

【図25】
【図26】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公開番号】特開2007−3287(P2007−3287A)
【公開日】平成19年1月11日(2007.1.11)
【国際特許分類】
【出願番号】特願2005−182200(P2005−182200)
【出願日】平成17年6月22日(2005.6.22)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成19年1月11日(2007.1.11)
【国際特許分類】
【出願日】平成17年6月22日(2005.6.22)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]