
Fターム[2F129GG05]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報の対象となる車両の構成部分 (2,045) | ブレーキ (616)
Fターム[2F129GG05]に分類される特許
1 - 20 / 616
ナビゲーションシステムおよびナビゲーション方法並びにプログラム
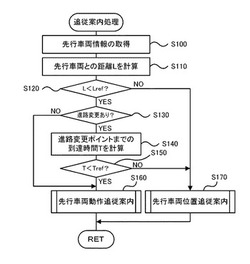
【課題】先行車両と自車両との距離を考慮してより適正に追従する。
【解決手段】先行車両と自車両との距離Lが予め定めた閾値Lref未満のときには、主として先行車両動作追従案内により追従案内を行ない(S160)、先行車両と自車両との距離Lが閾値Lref以上のときには目的地までの走行経路の案内と同様の手法の先行車両位置追従案内により追従案内を行なう(S170)。これにより、先行車両と自車両との距離Lが閾値Lref未満での先行車両を視認できる程度のときには先行車両の動作を迅速に確認しながら容易に先行車両を追従することができ、先行車両と自車両との距離Lが閾値Lref以上で先行車両を視認できないときでも使い慣れた案内により先行車両をより的確に追従することができる。
(もっと読む)
カーナビゲーションシステムを用いる車両走行制御装置

【課題】[0047]
近年、駐車場においてアクセルをブレーキと間違えて踏み、建物に突入したり、人身事故を起こしたりする事例が増えている。障害物を検知し自動停止する装置が自動車に実装されつつあるが、そもそもアクセルをブレーキと間違えて深く踏んでしまう事態には十分に対応できない。
【解決手段】[0048]
本発明によれば、駐車場のように建物の近くか内部にあり、人の往来も多い徐行すべき場所では、カーナビゲーションシステムの情報を用いて自動的に徐行になり、アクセルを過度に踏んでも徐行速度以上にはならず、車両自動停止装置が十分有効に機能することができる。
(もっと読む)
車両用走行支援装置
【課題】 交差点での対向車線へのはみ出しやガードレール等への接触を抑制できる車両用走行支援装置を提供する。
【解決手段】 自車前方の目標走行ラインL*上に前方注視点P*を設定し、自車が設定した前方注視点P*を走行するように車両の走行を支援する車両用走行支援装置において、自車前方の交差点形状を認識する交差点形状認識部11と、自車の進行方向を検出する進行方向検出部15と、自車の進行方向に基づいて交差点の進行先走行路を決定し、進行先走行路の入口を形成する両端PL,PRを結ぶ第1の直線LL-Rと目標走行ラインL*との交点よりも交差点内側の位置に、進行先走行路に対する前方注視点P*を設定する前方注視点設定部14と、自車が前方注視点P*を走行するように左右前輪1L,1Rを転舵する操舵制御部16と、を備えた。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、およびプログラム
【課題】従来のナビゲーション装置においては、運転時の操作や、運転時の操作の特性に応じたガイダンスはできなかった。
【解決手段】運転操作情報が格納される運転操作情報格納部と、運転操作情報を取得する運転操作情報取得部と、当該運転操作情報を運転操作情報格納部に蓄積する運転操作情報蓄積部と、1以上の運転支援情報を取得する運転支援情報取得部と、運転支援情報を出力する出力部とを具備し、運転支援情報取得部は、運転操作条件と運転支援情報とを対応付けて有する1以上の運転支援管理情報が格納される運転支援管理情報格納手段と、1以上の運転操作情報が合致する運転操作条件に対応付けられている1以上の運転支援情報を運転支援管理情報格納手段から取得する運転支援情報取得手段とを具備するナビゲーション装置により、運転者の運転操作や運転特性に応じてガイダンスができる。
(もっと読む)
車載カメラシステム及び画像表示装置
【課題】 車両のバッテリを無駄に消耗させることなく、車両を後退させる際に、リアカメラにより撮影した後方画像を速やかに表示させる。
【解決手段】 ドライブモード又はパーキングモードが選択されたとき、選択されたモードを示すモード信号を受信するモード信号受信部と、ドライブモードが選択されたことを示すモード信号に次いで、パーキングモードが選択されたことを示すモード信号を受信した場合に、ドライブモードからパーキングモードへのモード切替状態を示すモード切替データを記憶するモード切替データ記憶部と、車両のフットブレーキ操作信号を受信するフットブレーキ操作信号受信部と、フットブレーキ操作信号を受信したとき、モード切替データ記憶部にモード切替データが記憶されている場合、カメラをオン状態に設定し、カメラにより撮影された後方画像を表示部に表示させる制御を行う制御部とを備える。
(もっと読む)
車両用画像表示装置
【課題】 車両が急制動状態にあるときに実風景に重畳表示される画像の表示を抑制して視認性を確保する車両用画像表示装置を提供すること。
【解決手段】 車両の運転者が視認可能な実風景と、この実風景に関連する情報であって車両の運転者に提供する情報を表す画像との重畳表示を制御する制御手段を備えた車両用画像表示装置であって、制御手段は、車両が急制動状態にあるか否かを判定し、車両が急制動状態にあるときは車両の運転者による実風景の視認性が向上するように実風景に対して重畳する画像の表示を抑制する。このとき、制御手段は、実風景に対して重畳する画像の表示の全部をなくす又は一部をなくす、実風景に対して重畳する画像を一部に集約して表示する、及び、実風景に対して重畳する画像を表示するときの色調を薄くすることのうちのいずれかにより、実風景に対して重畳する画像の表示を抑制する。
(もっと読む)
移動体通信装置及び追突防止支援方法
【課題】感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があるときに、当該追突する可能性がある他の移動体(他の車両)との事故を未然に防ぐ追突防止支援を行う移動体通信装置及び追突防止支援方法を提供すること。
【解決手段】移動体に備えられ、感知器が検出した感知エリアに存在する他の移動体の情報を含む情報を受信する通信部と、前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行う制御部と、を備える移動体通信装置であって、前記制御部は前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判断し、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置及び/又は前記減速目標速度を変更することとする。
(もっと読む)
車両用制御装置
【課題】どのような車両操作により所定の走行制御が実行され易くなるかということを把握できる情報を提示することができる車両用制御装置を提供する。
【解決手段】表示部76は、走行データが蓄積された履歴情報DThisから現在の車両状態に基づいて、惰性走行制御(所定の走行制御)が実行されると予測されるということを、車両6の現在位置を基準とした所定範囲内の走行路に関連付けて表示装置64に表示する。従って、運転者が現在の車両状態を変化させれば、惰性走行制御が実行されると予測される走行路が変化して表示されるので、電子制御装置60は、どのような車両操作により惰性走行制御が実行され易くなるかということを把握できる情報を、運転者に対して提示することができる。そうなれば、例えば運転者は上記惰性走行制御による燃費向上というメリットを意識的に引き出すように、車両6を走行させることが可能である。
(もっと読む)
走行支援装置
【課題】表示器の表示を自車両の前方又は側方の撮像画像からナビゲーション装置による案内画像に切替えるタイミングを、適切に設定することができる走行支援装置を提供する。
【解決手段】表示器7にナビゲーション装置6の案内画像が表示された状態で、車両1の走行速度が第1画像切替速度以下になったときに、表示器7に表示する画像を前記案内画像からカメラ2L,2Rにより撮像された前側方画像に切替え、その後、車両1の走行速度が第2画像切替速度以上になったときに、表示器7に表示する画像を前記前側方画像から前記案内画像に切替える表示制御部15と、第1画像切替速度を車両1の減速度が大きいほど高く設定すると共に、第2画像切替速度を第1画像切替速度よりも所定の速度幅分、高く設定する切替速度設定部14とを備える。
(もっと読む)
ナビゲーション装置
【課題】運転者の運転特性に基づいて、高い精度でエネルギー消費量を設定することができるナビゲーション装置を提供する。
【解決手段】車両の走行履歴を用いて運転傾向を学習する運転傾向学習部104と、運転傾向学習部104で学習した運転傾向と道路の距離情報および勾配情報とに基づく予測エネルギー消費量からリンクコストを動的に設定するリンクコスト設定部102と、リンクコスト設定部102で設定したリンクコストと地図情報に基づいて走行経路を探索をする経路探索部103を備え、運転傾向学習部104は、運転傾向を学習する運転学習部104aと、運転傾向と道路の距離情報および勾配情報とに基づく下り勾配の道路での予測エネルギー回生量を学習する回生傾向学習部104bを有する。
(もっと読む)
車両操作診断装置、車両操作診断方法及びコンピュータプログラム
【課題】適切に運転者の車両操作の診断を行うことを可能にした車両操作診断装置、車両操作診断方法及びコンピュータプログラムを提供する。
【解決手段】各車両から走行時の周辺環境を対応づけた走行データを取得し(S12)、走行データDBへと累積的に格納する(S17)。また、車両から走行データが送信された場合には、走行データDBに記憶された走行データの履歴の内、診断対象とする走行データの車両操作が行われた際の周辺環境に対応する走行データの履歴を抽出し(S13)、抽出された走行データと診断対象とする走行データとを比較することにより、運転者の車両操作を診断する(S14、S15)ように構成する。
(もっと読む)
車両用端末のためのユーザーインターフェース方法、装置、及びこれを具備する車両
【課題】車両の運行においてユーザーの安全運行をはかる車両用端末のためのユーザーインターフェース方法及び装置を提供する。
【解決手段】位置情報を獲得してどの道路のどの地点であるかを把握する段階S401と、運行方向の道路の画像を獲得して、獲得した道路の画像に示される車路を認識してどの車路に位置するのかを把握する段階S403と、前記の認識された車路に対する仮想車路を生成して、これを前記の運行方向の道路の画像に付け加えて表出する段階S405及び前記の把握された該当の道路の地点で車路別交通情報及び周辺情報を獲得して、これを前記の仮想の車路別に知らせる段階S407を含む。
(もっと読む)
車両制御装置
【課題】ドライバが安全確認の警告を無視した場合に車両を発進することができないようにする車両制御装置を提供する。
【解決手段】一時停止の必要がある場所では、車両が確実に停止させられるように警告もしくは制御介入を行い、その後、安全確認が実施されるまでアクセルを無効にして車両が発進させられないようにする。これにより、ドライバが安全確認の警告を無視して安全確認を怠っている場合に、車両を発進させることができないようにすることが可能となる。また、ドライバが安全確認を怠っているのにかかわらず車両を発進させようとした場合に、なお車両を発進させようとアクセルペダルを踏み込んでいるような場合には、教育ガイドを行うことで、ドライバに確実に安全確認を行わせる。このような教育ガイドを行うことにより、ドライバに安全確認を習慣付ける教育効果を得ることが可能となる。
(もっと読む)
車載機能制御装置
【課題】車両に備わる複数の機能を効果的に調整することが可能な車載機能制御装置を提供する。
【解決手段】HMI管理装置が実行するモード設定処理では、機能単位で構成された複数の機能プログラムを実行する各ECUから送られてくる入力情報に基づいて、車両の運転者の余裕度を推定し(S211)、その余裕度に応じてモード設定を行う。具体的には、車両の運転にとって付加的な機能に対応する全ての付加的機能プログラムの実行を許可するモードを通常モード、一部の付加的機能プログラムの実行を制限するモードを限定モードとして、余裕度が高レベルである場合には(S230;YES)、通常モードに設定し(S235)、余裕度が中レベルまたは低レベルである場合には、限定モードに設定する(S236,S237)。そして、ここで設定したモードにて付加的機能プログラムを実行させるための制御指令を各ECUに送信する(S240)。
(もっと読む)
車両異常通知装置
【課題】車両に異常が発生したか否かの判定を精度よく行うことのできる車両異常通知装置を提供する。
【解決手段】運転者が危険を感知したことを示す感情状態である危険感知状態と、走行動作に影響する車両の異常が疑われる車両状態である異常被疑状態とを検出し(S11〜S13)、これらの検出結果に基づいて、走行動作に影響する車両の異常が発生したか否かを判定する(S15)。具体的には、危険感知状態が検出された場合には、危険感知状態が検出されない場合と比較して、異常が発生したと判定されやすい判定基準で判定を行う。このため、車両に異常が発生したか否かの判定を精度よく行うことができる。
(もっと読む)
車両情報システムおよびテレマティクスサーバ
【課題】
タイヤ空気圧の低下を検知したのち、タイヤに空気を補充するサービス設備へ案内する。
【解決手段】
タイヤ空気圧監視システム10は、車両1に搭載され、TPMSサーバ8と無線を介して情報を送受信可能であり、現在位置から目的地に至る経路を検出して報知するナビゲーション装置7と、TPMSサーバ8との間で情報を送受信するテレマティクスコントロールユニット79と、タイヤ空気圧を検出し、インジケータ4によって前記タイヤ空気圧の低下を運転者に報知するタイヤ空気圧監視ユニット5とを備え、所定周期で現在位置の情報とタイヤ空気圧の情報をTPMSサーバ8に送信する。TPMSサーバ8は、タイヤ空気圧が所定値以下であることを検知すると、タイヤ空気圧を補充可能かつ車両1の最寄りに位置しているサービス設備120の情報を送信し、タイヤ空気圧監視システム10は、この情報を報知する。
(もっと読む)
運転支援装置
【課題】カーブでの実際の車両の挙動により応じた減速制御が可能となる運転支援装置を提供する。
【解決手段】運転支援装置10aの自動減速制御部16は、車両のカーブに対する進入速度が過大と予測されるときに、カーブを車両が走行中に車両のドライバーが互いに異なる運転操作を行なう操作区間それぞれに応じて、ドライバーの運転操作に介入して車両を減速させる。このため、ドライバーがカーブで行なう運転操作に対応し、カーブでの実際の車両の挙動により応じた減速制御が可能となる。
(もっと読む)
車載装置
【課題】ユーザが車両に乗車している際に、未再生の音声データが存在することを音声によって報知することによって、ユーザに未再生メッセージの再生を促すことを可能とする車載装置を提供することを目的とする。
【解決手段】音声入力手段(128)と、音声入力手段によって入力された音声データを記録する記録部(105)と、記録部に記録された音声データを音声出力する音声発生部(140)と、車両に対する操作を検出する検出部(123)と、記録部に記憶された音声データの内、未再生の音声データが存在する場合には、検出部による前記操作の検出に応じて、未再生の音声データが存在することを報知するように制御する制御部(100)を有することを特徴とする車載装置(10)。
(もっと読む)
移動体位置測定装置
【課題】車載カメラを利用した実時間測位の技術に係わり、安価かつ高精度な測位を実現できる技術を提供する。
【解決手段】本自動車及び車載情報システム100の実時間測位部1は、車載のカメラ4から参照地点付近で撮影された複数の実画像を入力し、その中から特徴部を抽出して第1の特徴情報(c1)とする第1の特徴抽出部11と、地図DB5から対応する第2の特徴情報(c2)を読み出して取得する第2の特徴抽出部12と、第1、第2の特徴情報を入力して特徴部を比較してマッチングすることにより、各特徴部の位置を推定し、当該位置をもとに、SFM手法を用いて、移動に伴う各時点の自車の位置と上記各特徴部の位置との相対的な位置関係を演算することにより、自車現在位置を推定して第2の位置情報(L2)として出力する特徴マッチング部13と、を有する。
(もっと読む)
車両の走行支援装置
【課題】交通流の判定精度を向上させて、渋滞の回避、解消のために車線変更を促す走行支援装置。
【解決手段】自車両の加速度と、周辺の他車両との車間距離とに基づいて、自車両が走行する車線での交通流の状態を判定する判定手段と、自車両が走行する車線に隣接する車線における車両情報に基づいて、移動可能な車線候補を設定する車線候補設定手段と、判定手段による判定結果に応じて、車線候補設定手段により設定された車線へ車線変更を促す車線変更促進手段とを備え、判定手段は、交通流の状態が、渋滞が発生する可能性が低い自由流の状態から車両の制動状態と加速状態が混合する混合流の状態へ移行する間に存在する臨界領域にあると判定できる場合に、車線変更を促す判定結果を出力する。
(もっと読む)
1 - 20 / 616
[ Back to top ]